
Fターム[5B057CD01]の内容
Fターム[5B057CD01]の下位に属するFターム
移動 (602)
回転 (1,074)
拡大、縮小、画素密度変換 (4,422)
Fターム[5B057CD01]に分類される特許
201 - 220 / 360
画像処理装置、画像処理方法、および画像処理プログラム
【課題】ユーザ操作の負担にならずにセキュリティ機能を維持することができる画像処理装置を提供する。
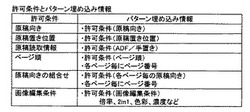
【解決手段】MFPは、読取られた原稿の画像を取得すると、その中に埋め込まれたコピーを許可する条件である、画像が読取られる状態の情報(原稿の向きなど)、または複写に対するパラメータの設定(倍率など)を取得する。画像が読取られた状態、または画像の複写に対する設定が、画像内に埋め込まれた許可条件と一致するときにのみ、コピーが許可される。
(もっと読む)
画像処理装置及び画像処理プログラム

【課題】画像の位置合わせの処理の全てを操作者による操作によるものではなくすることができ、画像の位置合わせのための射影変換行列を安定的に求めることができ、さらに画像の位置合わせの処理量を少なくすることができるようにした画像処理装置を提供する。
【解決手段】画像処理装置の特徴点抽出手段は、2枚の画像から特徴点を抽出し、特徴点選択手段は、各々の前記画像から1個以上の特徴点を選択し、特徴点対生成手段は、前記特徴点選択手段により選択した特徴点の対を生成し、変換係数算出手段は、前記特徴点対生成手段により生成された1個以上の対を用いて変換係数を算出し、画像変換手段は、一方の前記画像の一部の領域を前記変換係数算出手段によって算出された変換係数に応じて変換し、距離計測手段は、前記画像変換手段によって変換された画像と他方の前記画像との距離を計測する。
(もっと読む)
画像処理方法、画像処理装置、画像読取装置、画像形成装置、コンピュータプログラム、及び記録媒体
【課題】2つの画像を合成する画像処理方法、画像処理装置、画像読取装置、画像形成装置、コンピュータプログラム、及び記録媒体の提供。
【解決手段】入力された原稿画像から複数の連結領域を抽出し、連結領域の重心を算出することによって特徴点を求める特徴点算出部531、算出した特徴点間の距離から原稿画像の特徴量を算出する特徴量算出部532、算出した特徴量を基に類似した画像へ投票する投票処理部533等を備える文書照合処理部53を備えており、この文書照合処理部53の機能を用いて2つの画像のそれぞれから特徴点を抽出し、抽出した特徴点の対応付けを行うことにより画像合成を行う。
(もっと読む)
画像処理装置
【課題】画像を処理する画像処理装置において、ユーザによる設定を視覚的に容易化する。
【解決手段】画像を処理する画像処理装置において、変換手段3が撮像時の座標系である第1座標系の画像を基準となる平面上に設けられた第2座標系の画像へ変換し、表示手段10が変換手段3により変換された画像を表示し、受付手段9が表示手段10による画像の表示に応じてユーザにより入力される設定情報を受け付ける。例えば、このような画像処理装置において、受付手段9は、設定情報として、画像処理に使用される情報を受け付ける。
(もっと読む)
画像形成装置、画像処理装置及びプログラム
【課題】記録シートに対する画像の位置ずれを補正する。
【解決手段】サイドレジずれが発生している場合、画像の位置を主走査方向に向かって、補正量算出部によって算出された補正量から欠損量を差し引いた値に相当する分だけ、画像を移動させると、画像欠損は発生しない。また、サイドレジずれとサイドスキューが発生している場合も、画像の位置を主走査方向に向かって、補正量算出部によって算出された補正量から欠損量を差し引いた値に相当する分だけ移動させると、画像欠損は発生しない。
(もっと読む)
画像処理方法及び装置
【課題】画像フレーム内の領域を前景領域と背景領域に分離する。
【解決手段】フレームのセットにおける前記領域の要素の特徴に適用される統計関数に基づいて少なくとも前記領域の背景モデルを作成する。更に、ラベルへの特徴のマッピングが受信される。複数の差分値を含む差分基準は、領域の要素の特徴及び背景モデルの特徴に基づいて計算される。差分基準及びマッピングに基づいて要素を分類する。
(もっと読む)
画像処理装置、及び画像処理方法
【課題】簡単な作業で効率良く寸法測定等を行なうようにする。
【解決手段】円形マーク3を計測対象物A2の正面部分B2に貼り付け、該計測対象物A2を不図示のデジタルカメラで撮影する。該マーク3の画像上の形状から、射影変換に必要な変換係数を求めて射影変換を行なう。また、該マーク3の画像上の寸法が目標値に一致するように、画像の拡大又は縮小を行なう。これにより、所定の縮尺のオルソ画像が得られ、該画像に基づき寸法測定等を行なうことができる。この寸法測定に際して、計測対象物A2を実測したりする必要が無いため、簡単な作業で効率良く寸法計測等を行なうことができる。
(もっと読む)
ゲームプログラム、ゲーム装置及びゲーム制御方法
【課題】モニタに表示された画像が示す内容を認識しやすくなるようにする。
【解決手段】本ゲームプログラムでは、コントローラ25の位置を規定するためのコントローラ用の位置座標データが、制御部に認識される。そして、コントローラ25のセンサに検知されたデータ、画像用の位置座標データ、およびコントローラ用の位置座標データの少なくともいずれか1つのデータに基づいて、コントローラ25と画像70との相対的な位置関係を規定するための相対位置データを算出する処理が、制御部により実行される。そして、コントローラ25と画像70との相対的な位置関係に応じて生じる視覚的な画像70の歪みを相対位置データに基づいて補正する処理が、制御部により実行される。そして、視覚的な画像の歪みが補正された画像70が、画像データを用いて画像表示部3に表示される。
(もっと読む)
撮像装置及びその制御方法及びプログラム及び記憶媒体
【課題】被写体の状況を画像認識することによって自動撮影する場合に、1枚も撮影が行われないような状況を回避できるようにする。
【解決手段】被写体像を光電変換して画像信号を生成する画像入力部105と、画像入力部により生成された画像を記憶する記憶部111と、画像入力部により生成された画像中の被写体の状況を判別する状況判別部103と、状況判別処理部により判別された被写体の状況が予め定められた自動撮影条件を満足した場合に、自動的に画像入力部で生成された画像を記憶部に記憶する動作である自動撮影動作を開始させるための自動撮影指示部102と、自動撮影指示部により自動撮影動作が指示されてから一定の時間が経過しても被写体の状況が自動撮影条件を満足しない場合に、自動的に画像入力部で生成された画像を記憶部に記憶させる撮影制御部と、を具備する。
(もっと読む)
画像処理装置、撮像装置、及び画像処理方法
【課題】ダイナミックレンジの大きな画像データを生成する際に行う複数の画像データの位置合わせを精度良く行うようにする。
【解決手段】領域抽出部106は、複数の画像データの画面をブロック化する。そして、領域抽出部106は、動きベクトルの検出対象のブロックと、そのブロックに対する参照画像のブロックとの双方に、位置合わせに不適切な除外画素が含まれていなければ、それらのブロックを共通ブロックとする。レベル補正部107は、共通ブロック内の画素値の平均値a1、a2を求め、その平均値a1、a2を用いて、共通ブロックの輝度レベルを合わせる。位置ずれ検出部108は、輝度レベルが合った共通ブロックを用いて位置のずれを検出し、位置補正部109は、その位置のずれ量に応じて、複数の画像データの位置を補正する。画像合成部110は、位置の補正を行った複数の画像データを合成する。
(もっと読む)
動体認識方法及び動体認識装置
【課題】 映像カメラを搭載した船体運動の影響を受けて、撮影した複数の隣接するフレームの映像の位置が一致しない揺動画像から、動く対象物をリアルタイムに自動抽出して認識する。
【解決手段】 所定の時間間隔で連続して撮影された連続画像を取り込むステップと、3枚の連続画像に遠景背景をモデルとしてテンプレートマッチング処理を行うステップと、テンプレートマッチング処理により得られたモデルの移動量や回転角度をフィードバックさせて3枚の連続画像の位置合わせを行うステップと、1枚目と2枚目、及び2枚目と3枚目の画像の組み合わせによりフレーム間差分処理を行い、得られた2つの差分画像の論理和を取り、動体を検出するステップと、検出された移動体に対してラベリング処理を行って、移動体個々を個別に認識するステップとからなる。
(もっと読む)
画像高画質化装置、及びその方法、並びに画像表示装置
【課題】様々な画像の動きに対応して、低解像度の画像から高画質な高解像度の画像を得るのに好適な技術を提供する。
【解決手段】画像表示装置10は、低解像度の画像を入力する入力部11、12と、入力部で入力された低解像度度画像を用いて、高解像度の画像を生成する解像度変換部15とを備えている。この解像度変換部は、入力された低解像度の画像から、画素単位で動きベクトル情報を取得する動きベクトル取得部151と、この取得された動きベクトル情報に基づいて高解像度の画像を生成するために用いられる係数を演算し、該係数を用いて高解像度画像を生成する演算部154とを含んで構成される。
(もっと読む)
モデルベースの冠状動脈中心線の位置決め
本発明は、基準オブジェクトモデル及び血管モデルを含む結合モデルに基づいて画像データセットに血管モデルを登録するシステム100に関する。上記のシステムは、画像データセットの空間に結合モデルを配置し、これにより配置された基準オブジェクトモデル及び配置された血管モデルを含む配置された結合モデルを生成する配置ユニット110と、画像データセットにおいて対応するランドマークと関連する配置基準オブジェクトモデルのランドマークの変位を含むランドマーク変位場に基づいて、変形場を計算する計算ユニット120と、変形場を使用して、配置結合モデルを変換させ、これにより変換基準オブジェクトモデル及び変換血管モデルを含む変換結合モデルを生成する変換ユニット130と、変換血管モデルを修正すること、及び修正した変換血管モデルの目的関数を最適化することに基づいて、画像データセットに変換血管モデルを登録する登録ユニット140とを有し、目的関数は、変換結合モデルと関連する修正した変換血管モデルの位置決めに基づく事前知識の位置の項を有する。それゆえ、システムは、基準モデルによって記載される基準解剖構造と関連する血管モデルの位置決めを考慮して、血管をモデル化するように構成される。 (もっと読む)
車両周辺監視装置
【課題】車両周辺監視装置において、新たにカメラ等の装置を追加することなく、前方側の画像も後方側の画像も得つつ、適正な変換処理がなされる車両周辺監視装置を提供する。
【解決手段】助手席側に設置されたサイドカメラ10と、サイドカメラ10で得られたカメラ視点の画像P0に対して、運転者の視点から見た運転者視点の画像P5に変換する画像処理部30と、得られた運転者視点の画像P5を表示する表示部40とを備え、サイドカメラ10は、その光軸以外の1軸回りに回動可能に設置され、画像処理部30は、カメラ視点の画像P0のうち、車両以外の画像部分P1と車両の画像部分P2とで相異なる処理条件による変換処理で運転者視点の画像P3,P4を得、これら2つの画像部分P1,P2にそれぞれ対応した視点変換の変換処理パラメータ(処理条件)は、車載サイドカメラ10の回動角度θに応じて変化される。
(もっと読む)
撮像装置、画像歪み補正方法及びプログラム
【課題】MOS歪みの影響を減らして手ぶれ補正の精度向上を図ることができる撮像装置、画像歪み補正方法及びプログラムを提供すること。
【解決手段】撮像装置100は、ライン毎の画素読出しを行う撮像部101、複数回撮影した画像データを記憶する画像記憶部102、分割数を指定する分割数指定部103、画素読出しライン方向に画像を分割し、各部を制御する画像分割制御部104、分割された画像のそれぞれにおいて、複数の画像データから画像間の移動量を算出する動き検出部105、分割された画像のそれぞれの画像間の移動量を基に画像を合成する画像合成部106、及び合成結果を保存する画像保存部107を備え、画像を読出しライン方向に分割し、分割箇所毎にそれぞれ独立に手ぶれ量(移動量)を求め、アフィン変換を用いて画像合成する。
(もっと読む)
画像表示方法および画像表示装置
【課題】比較読影の対象となる同一被写体についての2以上の画像について、従来よりも比較読影性能を向上させるように表示させる。
【解決手段】経時サブトラクション処理手段15により、比較読影の対象となる原画像間でサブトラクション処理を施し、位置合わせ手段13により、サブトラクション処理により得られた2以上のサブトラクションを解剖学的特徴部分について位置合わせし、表示フォーマット設定手段12により、これら2以上の位置合わせされたサブトラクション画像を画像表示面11に並べて表示させる。
(もっと読む)
物体認識装置および映像物体測位装置
【課題】同一種類の対象物の画像に、撮影時の状況や画像ノイズに起因した見かけ上の違いが存在していても、その対象物を正確に認識可能にする。
【解決手段】テンプレート画像格納手段の複数のテンプレート画像のそれぞれについて、複数の画像特徴量をそれぞれ抽出し、抽出した画像特徴量間の相関係数行列を求め、次に画像取得手段で取得したフレーム画像から認識対象とする入力画像を抽出し、当該入力画像について、テンプレート画像と同様に複数の画像特徴量を抽出して画像特徴量間の相関係数行列を求め、求めた入力画像の相関係数行列と複数のテンプレート画像の相関係数行列を比較して入力画像と複数のテンプレート画像間の距離をそれぞれ算出し、算出した距離が最も小さいテンプレート画像の対象物を、入力画像の対象物として認識する画像認識処理手段を備える。
(もっと読む)
画像処理装置、画像処理方法、そのブログラム及びそのプログラムを記録した記録媒体
【課題】、歪補正における計算量を低減することができる画像処理装置、画像処理方法、そのブログラム及びそのプログラムを記録した記録媒体を提供すること。
【解決手段】広視野の全体画像内で選択された選択領域の画像が歪補正されるとき、その歪補正処理により座標計算された点pの座標(x,y)が、小数点を含む実数である場合が多い。4点の画素データ(4点それぞれの輝度データ(Yデータ)及び色差データ(CrCbデータ))が読み出されると、そのうち、点pの輝度データについては、直線補間し、色差データについてはその色差データそのものを使用する。これにより、歪補正における計算量を低減することができる。
(もっと読む)
マイクロ3D
【課題】顕微鏡写真による二次元情報を三次元情報にするためには、標本の位置と角度をそろえる必要がある。
【解決手段】連続切片のプレパラート上の標本は位置、傾きが一定ではないので連続するデジタル顕微鏡写真が重なり合うようにコンピューター上で位置と角度を調整する必要がある。このために、連続切片のデジタル画像上で三点の特徴的な位置を選択し、その三点をマーカーとして連続する二枚の画像が重なるように回転、平行移動、伸縮する。この操作において二枚の画像をモニター上で交互に点滅させ残像を利用して最も動きが少なくなるように位置と角度を微調整する。このようにして得られた画像のビットマップファイルデータを切片の厚さを有するボクセル情報とし、その情報を積み重ねることによって、顕微鏡レベルの生体組織のデジタル三次元情報を得ることが出来る。
(もっと読む)
接近移動体表示装置、システム及び方法
【課題】 自車両から死角となる移動体の接近情報を検知してドライバに表示する。また通信時間等による時間遅れがあっても、その移動体を正確に表示する。
【解決手段】 カメラ3で道路の交通状況の画像を繰り返して撮像し、カメラ3で撮像された各画像情報に基づいて当該道路を移動する移動体Cを認識し、前記認識された移動体Cの位置情報から同移動体Cの画面上の仮想表示位置を算出し、前記算出された移動体Cの仮想表示位置Cvを前記車両内の画面に表示し、前記表示された移動体Cの仮想表示位置Cvを当該画面における移動体Cの実表示位置Crに近づける。
(もっと読む)
201 - 220 / 360
[ Back to top ]