
Fターム[5B057CD01]の内容
Fターム[5B057CD01]の下位に属するFターム
移動 (602)
回転 (1,074)
拡大、縮小、画素密度変換 (4,422)
Fターム[5B057CD01]に分類される特許
21 - 40 / 360
画像処理装置、画像処理方法、コンピュータプログラム
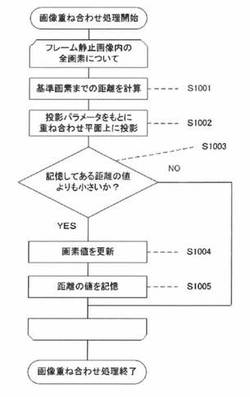
【課題】 動画像から切り出した複数のフレーム静止画像を重ね合わせて一枚の静止画像を構成する際、フレームの中央は明るいが端に行くにつれ暗くなるといった画像内の明るさムラの影響で、構成後の静止画像の画質が低下してしまうこと。
【解決手段】 各フレーム静止画像内の注目画素から基準画素までの距離を計算し、それに応じて重ね合わせに用いるフレーム静止画像を、重ね合わせ平面上の画素ごとに切り替えて構成を行う。これによって、明るさムラの影響を受けにくいように各フレーム静止画像を重ね合わせることができ、構成後の静止画像の画質の低下を抑えることが可能になる。
(もっと読む)
拡張現実感提供装置及び仮想物体の重畳方法

【課題】マーカーを用いることなく、違和感のない拡張現実感を提供することが可能な拡張現実感提供装置を提供する。
【解決手段】地面推定部5は、撮像部1,2で撮像して得られる2つの撮像画像データの各々から顔を検出し、検出した顔の目と口を結ぶ三角形の三次元座標を算出する。地面推定部5は、2つの撮像画像データの一方から前記検出した顔を含む被写体の輪郭を抽出し、この輪郭を前記三角形の三次元座標を用いて三次元空間に逆投影する。地面推定部5は、三次元空間における前記輪郭のデジタルカメラ100の鉛直線の伸びる方向の端部を含みかつ当該方向に垂直な面を地面と推定する。地面推定部5は、表示部11に表示される立体映像において、前記推定した地面上に仮想物体を重畳表示させる。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム及び撮像装置
【課題】被写体が移動していても、実際の顔部に顔部を検出するための領域を合わせること。
【解決手段】撮像時刻の異なる連続した複数の画像データのそれぞれから被写体の顔部に対応する第1の画像領域を検出する顔検出部と、前記顔検出部により検出される前記第1の画像領域から前記顔部内の少なくとも1つの器官に対応する第2の画像領域を検出する器官検出部と、前記顔検出部により検出される前記複数の画像データ上での前記顔部の移動位置に追従して前記器官検出部により検出される前記少なくとも1つの器官の前記画像データ上での画像位置を補正する顔部補正部とを具備する画像処理装置である。
(もっと読む)
着せ替えシミュレーション用サーバ、着せ替えシミュレーション用の衣服等の画像データの自動生成システム及び着せ替えシミュレーション用の衣服等の画像データの自動生成方法
【課題】着せ替えシミュレーション用の衣服、履物、アクセサリ、帽子等の画像データの作製における非常な手間と時間と費用を削減し、もともと着せ替えシミュレーション用に作製されていない衣服、履物、アクセサリ、帽子等の画像データも着せ替えシミュレーションに利用可能とする。
【解決手段】衣服、履物、アクセサリ、帽子等の画像データ中の衣服、履物、アクセサリ、帽子等の形状認識処理により、カテゴリの判断処理を行い、種々のテンプレートデータとの対応付けを行う。対応付けにより抽出した種々のテンプレートデータの合成処理を行うと共に当該画像データの画像処理を行い、その後これらのデータの合成処理を行う。更に、着せ替えシミュレーションのモデル画像に貼り付けによる合成処理を行う。
(もっと読む)
撮像装置及び画像表示システム
【課題】画像データの取込みに手間と時間をかけずに所望の画像を表示させること。
【解決手段】デジタルカメラ2の撮像部31は、フォトフレーム1を含む被写体を撮影し、液晶モニタ37はその被写体画像を表示し、制御演算部40は、被写体画像中のフォトフレーム1の液晶ディスプレイ17の表示画面部分の位置のデータを算出し、その位置のデータに基づいてフラッシュメモリ35に記憶されている撮影画像を図形変換し、被写体画像中の液晶ディスプレイ17の表示画面部分に図形変換された撮影画像を嵌め込み、WiFi通信部39は、図形変換された撮影画像の原画像をWiFi通信部19を介してフォトフレーム1へ送信し、液晶ディスプレイ17はその原画像を表示する。
(もっと読む)
段差エッジ推定装置
【課題】撮像手段により取得されるステレオ画像を利用して、階段等の段差部の平坦面部の先端部のエッジの位置及び方向を精度良く推定することを可能とする装置を提供する。
【解決手段】撮像手段3R,3Lにより撮像した2つの撮像画像(ステレオ画像)を用いて段差部(階段)50の段差エッジ52の位置及び方向を推定する。第1の撮像画像に設定した領域における画像の素値分布と、第2の撮像画像の対応領域における画像を平面パラメータに応じて射影変換してなる画像の画素値分布との間の誤差を表す誤差関数を線形結合して構成される評価関数を算出し、この評価関数の値を最小化するように、段差エッジの位置及び方向を表す段差エッジパラメータを探索的に特定する。
(もっと読む)
透明シート
【課題】ドキュメントの置き方やカメラの位置に影響されずに、かつ用紙の色や角部の破砕があったとしても、画像補整が可能でドキュメントの再現性が高い撮像技術を提供する。
【解決手段】デジカメやスマートフォン等のカメラ付き携帯電話で、ドキュメントの撮影をする際にドキュメント用紙に位置決めシンボルを印刷しておき、この位置決めシンボルを基準に画像処理を行うことで、用紙の色や角部の破砕があったとしても、画像補正(台形補正)が可能でドキュメントの再現性が高い画像処理が可能になる。
(もっと読む)
移動体検出装置
【課題】動きベクトルを用いることなく撮影画像から移動体を検出する
【解決手段】フレームデータを取得する毎に、このフレームデータと、1フレーム前のフレームデータとを差分したフレーム差分画像データ(S40)を、ブロック画素を単位として分割し、ブロック画素毎に離散コサイン変換(DCT)を行うことにより、二次元DCT係数を算出し(S60,S70)、二次元DCT係数を蓄積して記憶する(S100)。そして、二次元DCT係数の各要素の値を配列して特徴ベクトルを構成し、フレーム差分画像データ内における同一位置のブロック画素毎に特徴ベクトルを時系列で並べて時系列ベクトルを生成する(S120)。その後、ブロック画素に移動体が写っている状態で得られる時系列ベクトルのサンプルを主成分分析して得られた主成分ベクトルに、時系列ベクトルを作用させて主成分毎の主成分得点を算出する(S130〜S150)。
(もっと読む)
画像処理装置、画像処理システム、及び画像処理方法
【課題】俯瞰画像における撮像画像の不連続性による影響を抑制する。
【解決手段】画像処理装置は、車両の進行方向またはその反対方向に対応する第1の撮像画像と、前記車両の進行方向軸と交差する方向に対応する第2の撮像画像の重複領域に含まれる物体の位置を検出し、前記第1の撮像画像に、前記物体が第1の位置にあるときに第1の評価値、前記車両の進行方向軸からの距離がより大きい第2の位置にあるときに前記第1の評価値より小さい第2の評価値を割り当て、前記第2の撮像画像に、前記物体が前記第1の位置にあるときに第3の評価値、前記第2の位置にあるときに前記第3の評価値より大きい第4の評価値を割り当て、前記評価値が大きい方の撮像画像に前記物体が含まれるように境界を決定して、前記第1、第2の撮像画像をつなぎ合わせるので、撮像画像の不連続性を抑制できる。
(もっと読む)
全方位画像生成方法、画像生成装置およびプログラム
【課題】複数の画像から奥行きのあるシーンの全方位画像を生成する。
【解決手段】複数の画像から奥行きのあるシーンの全方位画像を生成する全方位画像生成方法であって、複数の視点位置から被写体を撮像した画像を取得するステップと、取得したそれぞれの画像を予め定義した複数のレイヤ面に投影するステップと、画像が投影されたレイヤ面上における被写体の色情報または輝度情報とを算出するステップと、取得した画像上の被写体の点をレイヤ面上に投影した画像の点との類似度を求めることにより、レイヤ面上の各点における被写体の存在確率を表す信頼度を算出するステップと、信頼度に基づき、被写体の信頼度が最も高いレイヤを中心として複数のレイヤを選択するステップと、選択されたレイヤ面上における被写体の色情報または輝度情報と信頼度情報に基づき、奥行きのあるシーンの全方位画像を生成するステップとを有する。
(もっと読む)
画像処理装置およびこれを備えた原稿読取システム
【課題】ブックスキャナなどの画像入力装置の構成を複雑化することなく、照明光の映り込みによる白飛びのない画像を取得することができ、さらにユーザの使い勝手を高めることができるようにする。
【解決手段】原稿が写った第1の撮影画像と、原稿の上方を横切るようにユーザが動かす動体の影が原稿上に写った第2の撮影画像と、を取得し、白飛び領域設定部32にて、第1の撮影画像に基づいて白飛び領域を設定し、白飛び修正処理部35にて、第2の撮影画像から白飛び領域内の影領域の画像を抽出して、その影領域の画像を第1の撮影画像に合成する白飛び修正処理を行うものとする。
(もっと読む)
並走体検出装置及び並走体検出方法
【課題】並走体の位置検出精度について向上を図ることが可能な並走体検出装置及び方法を提供する。
【解決手段】並走体検出装置1は、カメラ10にて得られた自車両Vの後側方側の異なる時刻の検出領域の画像を、鳥瞰視上で位置を合わせると共に、位置合わせされた異なる時刻の画像データの差分画像データに基づいて、並走体と地面との境界となる接地線を検出する計算機50を備えている。また、計算機50は、差分画像データに対して自車両Vの移動方向と略平行な複数の線をそれぞれ異なる位置に設定し、差分画像データのうち、設定した略平行な複数の線それぞれの自車両Vの遠方側におけるデータに対し、検出領域の画像を鳥瞰視に視点変換した際に並走体が倒れ込む方向に沿って、所定の差分を示す画素数をカウントして度数分布化することで複数の差分波形を生成し、生成した複数の差分波形の形状変化から並走体の接地線を検出する。
(もっと読む)
画像処理装置、画像処理方法およびプログラム
【課題】画像中の特定領域の位置・姿勢を高精度に推定可能な、画像処理装置、画像処理方法およびプログラムを提供する。
【解決手段】入力画像I1の特徴点を抽出する特徴点抽出部11と、参照画像Rとの間で特徴点の対応関係を決定するマッチング部12と、対応関係に基づき入力画像I1と参照画像Rの射影関係を算出するホモグラフィ算出部13と、射影関係に基づき入力画像I1の少なくとも一部を変換する画像変換部14とを備え、ホモグラフィ算出部13は、入力画像I1について、参照画像Rとの間で特徴点の対応関係に基づきホモグラフィ行列H1を算出し、画像変換部14によりホモグラフィ行列H1に基づき変換された入力画像I1について、参照画像Rとの間で特徴点の対応関係に基づきホモグラフィ行列H2を算出し、ホモグラフィ行列H1、H2に基づき入力画像I1と参照画像Rの射影関係を再び算出する
(もっと読む)
複数の画像フレームの位置合わせ方法、スキャニング装置およびコンピューター読み取り可能な媒体
【課題】文書上を手で動かされる小型スキャナーにおいて粗悪な画質およびスキャンされた複数部分の粗悪な位置合わせの改良された方法を提供すること。
【解決手段】初期変換パラメーターからのエラーを調べることによりページ落ち状態または無効なセンサーの位置データが検出される。異常に大きなエラーに遭遇した場合、センサーの読み出し(位置データ)は無効であるかもしれず、またはセンサーがページ落ちであった。次に無効なセンサーデータが特定され除去される。最後に有効なセンサー位置データのみを用いて変換パラメーターが再推定される。センサーの持ち上げ状態を考慮して加重最小二乗最小化が用いられる。センサーが持ち上げられると、センサーに関連するエラーに対する重みは小さな重みまたはゼロに設定される。センサーエラーの加重にはさらにセンサー位置の幾何学的特性が考慮される。センサーデータおよび付属エラーの信頼測定が行なわれる。
(もっと読む)
共焦点顕微鏡システム、画像処理方法および画像処理プログラム
【課題】観察対象物の表面の断面曲線を正確でかつ高速に検出することが可能な共焦点顕微鏡システム、画像処理方法および画像処理プログラムを提供する。
【解決手段】使用者が観察対象物Sの断面曲線データの取得範囲を指示する。CPU210は、その指示に基づいてX方向に沿って連続的に並ぶ複数の帯状領域を設定するとともに、各帯状領域においてX方向に平行な複数の測定ライン上でレーザ光を走査することにより、複数の測定ラインに基づく画素データを制御部300から取得する。CPU210は、取得した複数の測定ラインの画素データに基づいて帯状領域の複数の断面曲線データを生成し、作業用メモリ230に記憶する。CPU210は、複数の帯状領域の複数の測定ラインについて生成された断面曲線データをX方向に沿って連続する測定ラインごとに連結することにより、連結された複数の断面曲線データを得る。
(もっと読む)
画像位置特定装置及び方法、位置合わせ信号埋込装置及び方法
【課題】切取の編集に伴う位置合わせの高速化を図ることができるようにする。
【解決手段】平行移動量候補選択部8が、処理順序判断部7により決定された順序が先の組み合わせから順番に、当該組み合わせに係るピーク座標と周波数スペクトルを、原画像に対する入力画像の平行移動量によって評価値が変化する評価式に代入して、その評価式が成立するか否かを判別することで、入力画像の平行移動量の全候補の中から、平行移動量の絞り込みを行う。
(もっと読む)
3次元座標計測装置
【課題】精度良くセンサ座標系を世界座標系に変換する。
【解決手段】基準プレート50を世界座標系でキャリブレーションされた3次元絶対座標計測器60で計測して、世界座標系における基準プレート50の基準点の3次元座標、法線ベクトル、及びエッジベクトルを演算する。また、3次元座標計測ロボット10の3次元センサ部8を指令値に応じた位置に移動させ、基準プレート50にスリット光を投射して撮像し、撮像した画像からセンサ座標系における基準プレート50の基準点の3次元座標、法線ベクトル、及びエッジベクトルを演算する。世界座標系及びセンサ座標系の各々における基準点の3次元座標、法線ベクトル、及びエッジベクトルを用いて、センサ座標系を世界座標系に変換する変換パラメータを、指令値毎に算出する。
(もっと読む)
誤差検出装置及び誤差検出プログラム
【課題】対象物の撮影画像の撮影方向及び撮影距離等に基づく二次元表示上の誤差の許容量を考慮して、対象物の当該対象物の設計情報に対する誤差を検出する誤差検出装置及び誤差検出プログラムを提供する。
【解決手段】誤差検出装置1は、対象物三次元情報113の表示画像と対象物の撮影画像情報111とを位置合わせする位置合わせ手段101と、撮影の視点となる座標と対象物三次元情報113の対象物を構成する面との距離及び撮影方向と面とのなす角度に基づいて算出される二次元表示上の誤差の許容量を、対象物三次元情報113の表示画像の座標に対応づけて誤差マップ114を生成する誤差マップ生成手段102と、対象物三次元情報113の表示画像及び撮影画像情報111から対象物の輪郭となるエッジ点を抽出するエッジ抽出手段103と、エッジ点と誤差マップ114とを比較してエッジ点が誤差を有するか否か判定する誤差点判定手段104とを有する。
(もっと読む)
車両用表示装置
【課題】利用者が車両周囲の状況が把握しやすい画像を表示することができる。
【解決手段】車両に搭載されたカメラ1a〜1fが撮像した撮像画像のデータを取得し、表示する映像の仮想視点Pを設定し、撮像画像を投影するために予め定義された曲面Qを有する基準曲面座標系131の少なくとも一部を、基準曲面座標系131に対する仮想視点Pの位置に応じて変形して変形座標系133を得て、撮像画像のデータを変形された変形座標系133に投影し、設定された仮想視点から車両及びこの車両の周囲を見た映像を生成し、生成された映像をディスプレイ3に表示させる制御装置10を備える画像表示装置100を提供する。
(もっと読む)
異方性フィルタリングを用いたシングルパス画像ワーピングシステム及び方法
【課題】シングルパス・ディジタル画像ワーピングにおける拡張された楕円又は矩形にわたる円形対称異方性フィルタリングのための方法及びシステムが開示される。
【解決手段】
フィルタリングは、入力画像空間における出力ピクセルのマップされた位置における不均一な画像スケーリング関数に近似する楕円を最初に求め調整することによって実行される。出力画像空間におけるこの楕円から単位円への線形変換は、フットプリント内部の入力ピクセル半径と、半径の関数として対応するフィルタ係数を計算する。フットプリントの形状は、画像品質及び処理速度のバランスを考慮して決定される。1つの実施形態において、平滑化及びワーピングのそれぞれの構成要素のプロファイルは結合されて、より鮮鋭度の高い細部が強調された出力画像を生成する。本発明の方法及びシステムは、入力画像の鮮鋭度を維持又は強調しながら、ギザギザのアーチファクトをもたらすことなく自然な出力画像を生成する。
(もっと読む)
21 - 40 / 360
[ Back to top ]