
Fターム[5B057CD01]の内容
Fターム[5B057CD01]の下位に属するFターム
移動 (602)
回転 (1,074)
拡大、縮小、画素密度変換 (4,422)
Fターム[5B057CD01]に分類される特許
121 - 140 / 360
3次元モデルの作成方法および物体認識装置
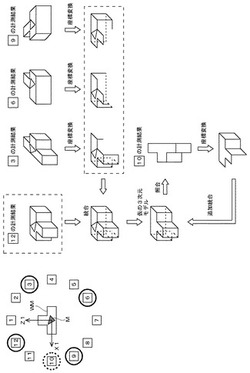
【課題】容量をできるだけ少なくして精度の良い3次元モデルを作成する。
【解決手段】3次元認識の対象とするワークの実物モデルWMに対し、ステレオカメラによる3次元計測を複数の方向から実行する。つぎに、各計測により復元された3次元情報のうちの所定数([12][3][6][9]の各計測ポイントの3次元情報)を位置合わせして統合することにより、仮の3次元モデルを作成する。さらに、統合されなかった3次元情報を対象に、仮の3次元モデルによる認識処理を実行し、その認識結果が正しくないと判定された3次元情報(計測ポイント[10]の情報)を仮の3次元モデルに位置合わせしてから統合する。最終的に、正しく認識されなかった3次元情報のすべてが追加された3次元モデルを本登録する。
(もっと読む)
認識処理方法およびこの方法を用いた画像処理装置

【課題】認識精度を確保しつつ、一定の時間内に対象物を認識する処理を終了する。
【解決手段】認識対象物のモデルの特徴点群から各辺の長さが所定の基準値を満たす三角形を抽出し、モデル三角形として登録する。認識対象物の2次元画像から抽出された特徴点群についても同様に、基準値を満たす三角形を抽出して比較対象三角形として登録する。つぎにモデル三角形と比較対象三角形とを順に対応づけ、頂点の対応関係を複数とおりに設定して、対応づけられた頂点(AとA´、BとB´、CとC´)の座標を用いて、両三角形の対応関係を表す変換パラメータを算出する処理と、モデルの特徴点群と対象物の特徴点群との関係に対する当該変換パラメータの適合度を求める処理とを実行する。そして、対応づけ毎に求められた適合度に基づいてモデルの特徴点群と認識対象物の特徴点群との対応関係を示す変換パラメータを特定することによって、対象物を認識する。
(もっと読む)
人物特定装置、人物特定方法及び人物特定プログラム
【課題】顔の正面画像が含まれていない画像情報からでも、人物の特定を可能にすることを目的とする。
【解決手段】画像取得部110は少なくとも3方向から人の画像情報を取得する。3次元モデル生成部120は、画像取得部110が取得した画像情報に基づき、その人を3次元モデルで表した3次元モデル情報を生成して、その人を識別するための情報として3次元モデル情報を3次元モデル記憶部130に記憶させる。その後、画像取得部110は新たに人の画像情報を取得する。人物特定部140は、画像取得部110が新たに取得した画像情報が示す人の姿勢に、3次元モデル記憶部130が記憶した3次元モデル情報の姿勢を変形して、画像情報が示す人と3次元モデル情報とを比較することにより、画像情報が示す人を特定する。
(もっと読む)
画像処理システム、画像処理方法、および画像処理プログラム
【課題】重ね合わせ画像を生成することで、2つの画像間のいずれの部分が相互に一致していないのかを容易に把握する。
【解決手段】印刷画像取得部101は、スキャナにより読み込まれた印刷画像を取得する。二値化部102は、印刷画像取得部101が取得した印刷画像を二値化する。画像保管部103は、二値化部102により二値化された後の第1印刷画像と第2印刷画像を保管する。補正係数算出部104は、第1印刷画像と第2印刷画像との間の幾何学的な補正を行うための係数を算出する。変換画像生成部105は、補正係数算出部104が算出した補正係数を利用し、第1印刷画像の変換を行う。重ね合わせ画像生成部106は、画像保管部103が保管している第2印刷画像と、変換された第1印刷画像とを重ね合わせた重ね合わせ画像を生成する。
(もっと読む)
電子透かしの同期回復装置及び電子透かしの同期回復プログラム
【課題】ドキュメントの一部が切り取られて一部の基準点が失われても、電子透かしの同期回復を行うことができるとともに、基準点を規則的に配置して、秘匿性の劣化を招くことなく、電子透かしの同期回復を行うことができるようにする。
【解決手段】複数の基準点の対応関係に基づいてオリジナルの紙面画像と印刷紙面画像間の幾何学的変化を示す幾何学変換パラメータを算出する幾何学変換パラメータ算出部10を設け、印刷紙面画像補正部11が幾何学変換パラメータ算出部10により算出された幾何学変換パラメータを用いて、印刷紙面画像を幾何学的に変換することで、印刷紙面画像を幾何学的に補正する。
(もっと読む)
サブトラクション画像処理装置及び処理方法
【課題】モーションアーチファクトが生じるおそれのある場合であっても、その影響のない適切なサブトラクション画像を容易且つ迅速に得ることのできるサブトラクション画像処理装置及び処理方法を提供する。
【解決手段】本発明は、サブトラクション画像処理装置及び処理方法に関するものであり、2ショットで得た2つの放射線画像情報に対して、アフィン変換処理を行うことで線形補正処理による位置合わせを行った後、放射線画像情報の撮影部位にモーションアーチファクトが生じる可能性がある場合、設定した処理領域に対して歪曲位置合わせ処理を行うことで非線形補正処理による位置合わせを行い、次いで、これらの放射線画像情報に対してサブトラクション処理を施すことにより、適切なサブトラクション画像を生成する。
(もっと読む)
情報処理装置およびプログラム
【課題】低コストで部屋の内観を変更すること。
【解決手段】情報処理装置は、画像形成装置と、前記画像形成装置に対応する外部装置とを特定する装置情報を取得する装置情報取得手段と、画像を示し、前記外部装置を制御するパラメータを含む画像データを取得する画像取得手段と、前記画像取得手段により取得された画像データに対して、前記装置情報に応じた加工をする画像加工手段と、前記画像加工手段により加工された画像データを、前記装置情報により特定される画像形成装置に出力する画像出力手段と、前記画像取得手段により取得された画像データに含まれるパラメータに応じて、前記外部装置を制御する制御信号を前記外部装置に出力する制御信号出力手段とを有する。
(もっと読む)
ワークの位置を求める画像処理装置
【課題】輪郭が不安定なワークを検出する際に、ワーク上に略同形の形状が複数存在している場合でもワークの誤認識を防ぐとともに、ワークの正確な位置姿勢を認識する画像処理装置を提供する。
【解決手段】鋳物部品等の輪郭が不安定なワーク7をパターンマッチングで認識する場合、まずワーク7の輪郭を認識して、その結果を使ってワーク上の所定部位8及び10を探索する範囲やパラメータを調整する。調整された探索範囲やパラメータを使ってワーク上の所定部位を認識することで、同形の形状が複数存在した場合でもワークの誤認識を防ぐとともに、ワークの正確な位置姿勢を認識することができる。
(もっと読む)
画像処理装置、方法及びプログラム
【課題】画像間で特徴の一致する対応点を検出する際に、フィルタ演算により生じる画像端の無効画像領域に位置する特徴点についてもその追跡を可能にする。
【解決手段】特徴点追跡部18は、基準画像(画像1)から抽出された特徴点のうちの有効画像領域に位置する特徴点については、従来と同様に追跡画像(画像2)上で特徴点の追跡(一度目の追跡)を行って対応点の検出を行う。画像変形パラメータ算出部20は前記検出された対応点から基準画像と追跡画像とを一致させるための画像変形パラメータを算出し、画像変形部22はこの画像変形パラメータにより追跡画像を変形させた変形画像(画像3)を作成する。特徴点追跡部18は、フィルタ処理により基準画像の画像端に生じる無効画像領域に位置する特徴点については、基準画像と変形画像とを用いて無効画像領域に位置する特徴点の追跡(2度目の追跡)を行って対応点の検出を行う。
(もっと読む)
車両周囲監視装置
【課題】車両の外界周辺領域の画像の表示切替に運転者が違和感を感じてしまうことを防止する。
【解決手段】車両周囲監視装置10は、自車両の外界周辺領域を撮像して画像を出力する複数の各カメラ11a,…,11dと、各カメラ11a,…,11dから出力される画像を視点変換して変換画像を出力する画像処理部42と、画像処理部42から出力される変換画像と、各カメラ11a,11bから出力される自車両の前方領域または後方領域の画像とを、表示装置19に表示する表示制御部45とを備え、表示制御部45は、前方領域または後方領域の画像の表示状態に関わらずに、変換画像の表示状態を一定に維持する。
(もっと読む)
画像処理装置、撮像装置、画像処理方法及びプログラム
【課題】ユーザが意図していないと考えられるフレームを自動的にモザイキング結果より取り除くことができる。
【解決手段】画像処理装置1は、カメラ接続I/F114を介して撮像装置2に記憶された動画像を取得し(ステップS10)、動画像を各フレームに分解し(ステップS20)、モザイキング処理を行う(ステップS30)。モザイキング処理(ステップS30)の過程で、分解した各フレームの中心座標及び4隅の座標を取得する。次に、モザイキング処理部132は、フレームの中心座標がどのように変化するかを示す中心座標軌跡に基づいて、ユーザが意図していないと考えられる箇所を抽出し(ステップS40)、各フレームの4隅の座標に基づいてステップS40で抽出された削除対象のフレーム群を、ステップS30で生成された合成画像から削除する(ステップS50)。
(もっと読む)
植生検出装置および方法
【課題】移動体搭載に適し、かつ近距離の観測対象に関して必要十分な植生検出を可能とする。
【解決手段】(1)第1の波長帯域のみを透過させる第1の光学フィルタを有する第1の撮像部と、(2)第2の波長帯域のみを透過させる第2の光学フィルタを有する第2の撮像部と、(3)撮像された画像を画像中の水平線で切り分け、水平線より下の画像は全て地面の平面上にあると仮定して、第1の射影変換を行い、第1の撮像部によって取得された観測データと第2の撮像部によって取得された観測データとを対応付ける対応付け部と、(4)対応付けられた観測データに関して、第1の撮像部によって取得された観測データに基づいて算出される反射率と、第2の撮像部によって取得された観測データに基づいて算出される反射率との比を算出する反射率比算出部と、(5)前記反射率比を所定の閾値と比較することによって、観測対象物が植物か否かを判別する判別部と、を具備する。
(もっと読む)
撮影装置及び撮影制御方法
【課題】 原稿を正面以外の方向から撮影した場合であっても、原稿に対するピント合わせを適切に行うことができ、原稿を撮影して得られた原稿画像の歪を補正したときに生じる画像の劣化を防止することが可能な撮影装置及び撮影制御方法を提供する。
【解決手段】 撮影装置10は、長方形の原稿100を撮影して得られた画像P100から原稿100が写っている原稿エリアA100を抽出する。撮影装置10は、原稿エリアA100に適切に合焦するようにAF及びAEを行った後、原稿100を撮影する。そして、撮影装置10は、AF後に撮影した画像から原稿エリアA100を抽出し、原稿エリアA100の歪みを補正して原稿100の形状を再現するとともに、原稿エリアA100の向きを補正し、出力用の原稿画像を作成する。プロジェクター200は、撮影装置10から原稿画像100′を受信してスクリーン300に投影する。
(もっと読む)
物体形状認識システム及び物体形状認識方法
【課題】 容易に物体の形状を認識する。
【解決手段】 物体形状認識装置10は、形状の認識対象となる物体を撮像するカメラ11と、物体から発生した音を検出するマイク12及び音検出部13と、音が検出されたタイミングでカメラ11によって撮像された画像における、音が発生した位置を検出する位置検出部14と、検出された位置から物体の形状を推定する形状推定部16と、を備える。
(もっと読む)
基板上の特徴を撮像する方法及び装置
基板上の特徴を撮像する方法は、前記基板を走査してその画像を生成することと、格子モデルを前記画像の上に重ね合わせることと、前記格子モデルを前記画像上の少なくとも幾つかの前記特徴の位置に適合させることと、前記特徴の画像を抽出することとを含む。 (もっと読む)
レーザ加工システムの安全区画を規定する方法
【課題】 機械加工デバイスにおいて安全区画又は制限区画を確立する方法を提供する。
【解決手段】 レーザ加工デバイスで利用される切削経路の安全区画を規定する方法。この方法は、計算機支援設計モデルにおける安全区画の位置座標を識別し、マシンビジョンシステムを使ってモデル化された物理的な加工デバイスを撮像し、設計モデルの安全区画の点と撮像された点の間の位置的な差を決定し、機械切削経路プログラムに入力させるために、設計モデルの安全区画の座標系を特定装置向け座標系に変換することを備える。 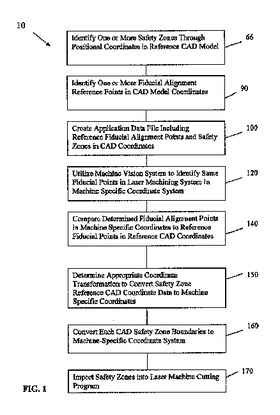 (もっと読む)
(もっと読む)
設計像と撮影像との重ね合わせ表示方法、表示装置および表示プログラム
【課題】裏面から撮影した画像と設計像とを簡便に重ね合わせ表示する。歪を持った撮影像の歪を簡便に補正し、設計像と位置をあわせ、重ね合わせ表示する。
【解決手段】設計像と撮影像とを重ねて表示する表示装置における表示方法であって、4点を結んだ4角形が設計像において垂直軸および水平軸と平行な矩形となる4点であって撮影像上で指定された4点を、撮影像においても前記4点を結んだ4角形が垂直軸および水平軸と平行な矩形となるように撮影像の歪を補正し(ステップS2)、設計像と撮影像との少なくとも一方に対して、左右反転、上下反転、移動、回転、拡大、縮小の一以上を施して、設計像と撮影像の位置を合わせ(ステップS3)、設計像と撮影像とを重ねて表示する(ステップS1)。
(もっと読む)
顔検出システム
【課題】外部の光変化による前方注視怠慢状態の検出性能が低下することを防止するための顔検出システムを提供する。
【解決手段】運転者の顔の右側に向かって赤外線を照射する第1照明部と、運転者の顔の左側に向かって赤外線を照射する第2照明部と、前記第1照明部および前記第2照明部から赤外線が照射された運転者の顔をそれぞれ撮影する画像撮影部と、前記画像撮影部から顔の左右画像を獲得し、獲得された左右画像の差画像を獲得して運転者の前方注視怠慢状態を判断する制御部とを含んでなることを特徴とする。
(もっと読む)
撮像装置および地図媒体
【課題】 大容量の記憶部を有さずに、印刷物より、ナビゲーション等に使用可能な地図を取り込むことのできる撮像装置、およびこれに適した地図媒体を提供する。
【解決手段】 QRコードを一緒に印刷した地図を撮影装置によって撮像することにより画像データを生成し(S101)、QRコードを探索し(S103)、QRコードを発見すると(S105)、QRコードを利用して歪量を求め(S131)、射影変換することにより歪のない地図データを得る(S133)。また、QRコードから緯度・経度情報を求め、また、地図の中心座標や縮尺を求めて、地図画像に付加する。
(もっと読む)
投影画像作成装置、方法およびプログラム
【課題】多数の2次元画像を用いて再構成して得た3次元画像データから視点を変えつつ投影画像を作成して観察する際に、3次元的位置関係の把握を容易にする。
【解決手段】第1の投影画像上で注目領域を指定し、第1の投影画像とは異なる第2の視点位置および/または投影方向から第2の投影画像を作成する際に、指定された注目領域と対応する3次元画像データ内のボクセルを第2の視点位置および/または投影方向から投影して得られる第2の投影画像上の領域を第2の投影画像上に表示する。
(もっと読む)
121 - 140 / 360
[ Back to top ]