
Fターム[5B057CD11]の内容
Fターム[5B057CD11]の下位に属するFターム
ひずみ補正 (948)
Fターム[5B057CD11]に分類される特許
1 - 20 / 319
情報端末装置
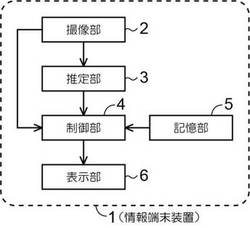
【課題】マーカや特別なセンサを用いることなく、撮像対象の位置及び姿勢を推定して表示部を制御する情報端末装置を提供する。
【解決手段】撮像部2と、情報を表示する表示部6と、表示部6で表示する情報を記憶する記憶部5とを備える情報端末装置1において、撮像部2で撮像した画像より撮像対象の撮像部2に対する位置及び姿勢を推定する推定部3と、記憶部5から読み出して表示部6で表示する情報を、推定された位置及び姿勢に応じて制御する制御部4とを備え、推定部3は、画像より撮像対象の複数の線分を抽出する線分抽出部30と、抽出された複数の線分と、撮像対象の所定配置の画像において撮像対象に対して予め設定された複数の基準線分との平面射影変換の関係を求めて、該写像関係より位置及び姿勢を推定する姿勢推定部34とを含むように構成する。
(もっと読む)
会話映像表示システム

【課題】視聴者が会話人物の視線方向を分かりやすく、会話人物の存在感を感じられる会話映像表示システムを提供する。
【解決手段】会話画像及び会話の各人物の頭部姿勢データを処理して会話状況を映像表示するシステムであり、各人物の位置と対応して配置された複数のスクリーン403と、各スクリーン403に各人物毎の画像を投影する映像投影装置401と、スクリーン403の姿勢を制御するアクチュエータ402と、スクリーン403の姿勢を、それに投影される画像中の人物の頭部姿勢と同期して変化させるべく、頭部姿勢データからアクチュエータ402の制御信号を生成する制御信号生成手段303と、画像上における各人物の顔領域を検出する顔位置検出手段301と、画像中の検出された顔領域を中心とした領域を、その人物の画像が投影されるスクリーン403の姿勢に応じて写像して映像投影装置401に出力する画像写像生成手段302を有する。
(もっと読む)
情報処理装置、表示制御方法、およびプログラム
【課題】被写体の動作に応じて着用状態を変化させることが可能な情報処理装置、表示制御方法、およびプログラムを提供する。
【解決手段】撮像された被写体の動作を検出する動作検出部と、前記動作検出部により検出された動作に応じて、前記被写体に重畳して表示される仮想的な服飾品の着用状態を変化させる表示制御部と、を備える、情報処理装置。
(もっと読む)
画像処理装置、画像処理方法およびプログラム
【課題】撮像画像に映る物体の状態または種類に基づいて、撮像画像に合成される仮想オブジェクトを決定する。
【解決手段】画像処理部100は、実空間に存在する物体の撮像画像に映る前記物体の状態または種類に基づいて、仮想オブジェクトを決定して前記撮像画像に対して前記仮想オブジェクトを合成し、表示装置130に表示された被写体21の位置に前記仮想オブジェクトが合成された撮像画像を表示する制御を行う前記表示装置130の表示制御部を備える。
(もっと読む)
多重投影輝度調整方法、多重投影輝度調整装置、コンピュータプログラム及び記録媒体
【課題】非線形な応答を有していたとしても、オリジナル画像とほぼ同等になるように、複数のプロジェクタが投影したコンテンツ画像の輝度を補正する。
【解決手段】画像入力部2は、カメラ20から画像データを取得する。画像変動検出部3は、その画像入力部2から画像を取得し、その画像情報を用いて輝度変動を検出する。モード判定部4は、全てのプロジェクタを制御するための同期信号を送出し、輝度調整部5−1〜5−N、または輝度分配部6−1〜6−Nへの処理を指示する。輝度調整部5−1〜5−Nは、その画像変動検出部3にて得た輝度変動に応じてプロジェクタ10−1〜10−Nから出力する輝度を調整し、多重投影輝度補正に用いるための分配係数を算出する。輝度分配部6−1〜6−Nは、分配係数を用いて各プロジェクタの輝度を補正する。
(もっと読む)
ドライバ支援システムのための、道路地形を検出する方法及びシステム
【課題】
本発明は、カメラ画像等の知覚入力に基づいて、車両の環境内における選択された位置を分類する方法を実行する道路地形検出システムについて記載する。
【解決手段】
本方法では、上記環境における、ベースポイントと称する選択された位置についての、高水準の空間特徴生成を行う。このベースポイントについての空間特徴生成は、環境の視覚的及び物理的特徴物を捉えた価値連続な信頼度表現に基づいて行われる。この信頼度表現は、生の知覚データを処理するいわゆる基本分類器により生成される。これにより、本道路地形検出では、センサデータから把握される局所的特徴物と、2段階の特徴抽出処理を経て取得されるこれら局所的特徴物の間の関連性とを組み込むことができる。
(もっと読む)
画像処理システム及び方法
【課題】医用画像を適切に表示することができる画像処理システム及び方法を提供すること。
【解決手段】実施形態に係る画像処理システムは、第1画像生成部と、第2画像生成部とを備える。前記第1画像生成部は、3次元の医用画像データであるボリュームデータに対してレンダリング処理を行うことで、第1画像を生成する。前記第2画像生成部は、前記ボリュームデータに対してレンダリング処理を行うことで、前記第1画像と立体感の異なる第2画像を生成する。
(もっと読む)
書籍用スキャン装置及び画像処理プログラム
【課題】書籍12をデジタルカメラ14で撮影する書籍用スキャナーにおいて頁の綴じ部分16までの撮影を高速に、簡易に、安価で可能とする書籍用スキャナーを提供する。
【解決手段】V字型の書籍台11に置かれた書籍12を、V字型の透明な板13で押さえ、書籍12の上方からデジタルカメラ14を設置し、必要に応じて偏光フィルターを設置して撮影する装置を用い、撮影して得られた電子データを、画像処理プログラムを用いて、デジタルカメラ14からの距離に応じて補正を行うことにより正規の形へ変形させて平面画像に投影し、所望する画像を得る。
(もっと読む)
再生表示装置、再生表示プログラム、再生表示方法、および画像処理サーバー
【課題】複数の画像を順次再生するにあたって、単調な画像の遷移とはならず、楽しむことのできる画像処理装置、画像処理方法、画像処理プログラム、および画像表示装置を提供する。
【解決手段】内容分析部55におけるチャットの分析結果は、表情切換部59に送られる。表情切換部59は、画像記録部58に記録された写真画像等の画像中の人物画像に対して、表情切換画像処理部と同様に、顔の顔パーツに対して表情の変化を施した画像、若しくは画像記録部58から読出したそのままの画像を、仮想空間と関連付け部57を介して仮想空間合成表示部53に送る。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】種々の変形態様に対応して、2次元平面に表示された画像を適切に変形すること。
【解決手段】画像に設定した変形制御点の移動に対応して、前記画像を変形させる画像処理装置であって、前記画像に三角形で構成されるオリジナルメッシュを設定するオリジナルメッシュ生成手段と、前記変形制御点の位置関係に応じて、前記三角形における変形の抑制度合いを設定する設定手段と、前記変形制御点の移動に対応して、前記設定手段によって設定された変形の抑制度合いに従って、前記オリジナルメッシュを構成する三角形の変形処理を行うメッシュ生成手段と、を備える。
(もっと読む)
車両周辺監視システム
【課題】各撮影画像から構成される車両周辺俯瞰画像において俯瞰画像セグメントの重複領域に現れる物体に対する運転者の視認性を改善する。
【解決手段】俯瞰画像セグメントの重複領域を予め設定された融合関数で融合して融合重複画像が生成される。融合関数は、重ね合わされる一方の撮影画像の撮影視野限界線と他方の撮影画像の撮影視野限界線との交点である基準点周りの角度に基づいて、または、一方の撮影画像の撮影視野限界線からの距離である第1パラメータと他方の撮影画像の撮影視野限界線からの距離である第2パラメータとに基づいて、あるいは、一方の撮影画像の撮影点と他方の撮影画像の撮影点とからの離散度に基づいて、重複領域における一方の撮影画像の画素成分と他方の撮影画像の画素成分との融合割合を導出する。
(もっと読む)
偽造防止用シートの作製方法及びその真偽判別方法
【課題】ハートレー変換を用いて秘匿画像を画像データに埋め込んだ場合でも、そのハートレー画像の一部のみでは、秘匿画像を検出することが不可能な偽造防止用シートの作製方法及びその真偽判別方法に関するものである。
【解決手段】偽造防止用シートは、ハートレー画像データ生成後に、ハートレー画像データをハートレー変換により秘匿画像データを復元することが不可能な大きさに分割して複数の第一領域データを生成したのち、複数の第一領域データに対して、ハートレー画像データのどこに位置していたかを示す固有の位置情報を付与し、位置情報が付与されたハートレー画像データを基材に所定の方法により施すことで作製する。
(もっと読む)
車両周囲画像撮像システム
【課題】車両周囲画像撮像システムにおいて、高性能な演算処理装置を必要とせず、かつ適正に周囲画像を補正する。
【解決手段】カメラ傾斜角センサ20(第1の検出器)によって検出されたカメラ10の傾き角度αiと車両傾斜角センサ40(第2の検出器)によって検出された車両200の傾き角度βとの差γi(傾き角度差分値)が、予め設定された基準値Γi(初期値や設計値等)から変化したときは、その変化量Δγi(ずれ量)に応じて俯瞰画像(周囲画像)の補正を行うものであり、差γiを算出する演算処理は軽負荷であるため高性能な演算処理装置を必要とせず、また、カメラ10の傾き角度αiの変化のみに応じて俯瞰画像の補正を行うのではなく、車両200の傾き角度βとの相対的な関係γiの変化に応じて補正を行うため、適正に俯瞰画像を補正する。
(もっと読む)
投写型映像表示装置
【課題】幾何補正回路の入力解像度を超える映像データおよびOSDデータを取り扱える投写型映像表示装置を提供する。
【解決手段】映像データが入力される入力処理部と、画面情報データを有し、入力処理部から入力した映像データおよび画面情報データの解像度を処理する画像処理部と、画像処理部によって処理された映像データおよび画面情報データを投写するための出力処理部を備える。画像処理部は、入力処理部から入力した映像データおよび画面情報データに対して幾何補正を行なう幾何補正部と、映像データおよび画面情報データの解像度を幾何補正部への入力解像度の範囲内にする第1の変換をさせ、第1の変換が行なわれた映像データおよび画面情報データを合成して幾何補正部へ出力する第1のスケーリング部と、幾何補正部からの出力解像度を出力処理部への入力解像度の範囲内にする第2の変換をさせ、第2の変換が行なわれた映像データおよび画面情報データを合成して出力処理部へ出力する第2のスケーリング部とを含む。
(もっと読む)
画像処理システム、端末装置及び方法
【課題】利用者が所望する立体画像を表示することができる画像処理システム、端末装置及び方法を提供すること。
【解決手段】実施形態に係る画像処理システムは、医用画像を表示する端末装置を有する画像処理システムであって、表示部と、取得部と、表示制御部とを有する。表示部は、医用画像を表示する。取得部は、所定の対象物に対する端末装置の位置を取得する。表示制御部は、取得部によって取得された対象物に対する端末装置の相対的な位置に応じた医用画像を表示部に表示させる。
(もっと読む)
道路勾配推定装置
【課題】片側の白線のみからでも車両前方の道路の道路勾配を推定可能な道路勾配推定装置を提供する。
【解決手段】画像処理部4で抽出した白線が破線であるとき、その白線のペイント部分と非ペイント部分の境界である端点を抽出する端点抽出部6と、視点変換処理を行い、車両前方の道路の道路勾配が、車両が走行している位置での道路勾配で一定であると仮定したときの各端点の見かけ上の位置を求める視点変換処理部7と、隣り合う端点間の見かけ上の距離と、予め求めた隣り合う端点間の実際の距離とに基づき、各端点間の勾配を求める端点間勾配取得部9と、端点間勾配取得部9が求めた各端点間の勾配に、車両が走行している位置での道路勾配を足し合わせることで、端点間の実際の道路勾配を求める道路勾配演算部10と、を備えた。
(もっと読む)
撮像装置、動画再生装置及び撮像方法
【課題】撮像された画像データにおける被写体の人物の目の開閉率が不適切な場合に、被写体の人物の目の開閉率を効果的に補正する。
【解決手段】入力された画像データにおける被写体人物の顔を検出する顔検出部と、前記画像データのうち前記顔検出部により検出された顔を含む顔画像を基に、前記被写体人物の目の目開閉率を判定する目開閉率判定部と、前記目開閉率判定部により判定された前記被写体人物の目の目開閉率を含む目開閉率情報を記憶する記憶部と、前記目開閉率判定部により判定された前記被写体人物の目の目開閉率と、前記記憶されている前記目開閉率情報における目開閉率に所定の補正許容率を乗じた目開閉率とを比較する比較部と、前記比較部の比較結果に応じて、前記目開閉率判定部により判定された前記目開閉率を補正する補正部と、を備える。
(もっと読む)
環境認識装置および環境認識方法
【課題】処理負荷を軽減すると共にメモリの記憶領域を低減することで、対象物の特定効率の向上を図る。
【解決手段】環境認識装置130は、特定物の形状に関する情報である形状情報を予め保持しておき、検出領域内を分割した複数の対象部位の輝度を取得して、エッジを有する対象部位を抽出し、エッジを有する対象部位の相対距離を取得し、相対距離に応じた形状情報に基づいてエッジを有する対象部位にハフ変換を施し、形状情報で示される特定物を決定する。
(もっと読む)
走行支援装置及び走行支援方法
【課題】撮像手段の数を増加させる必要が無く、且つ、移動体の真後ろの二輪車について検出することが可能な走行支援装置及び走行支援方法を提供する。
【解決手段】視点変換部31は、カメラ10による撮像にて得られた画像を鳥瞰視される状態へ視点変換し、位置合わせ部32aは、視点変換された異なる時刻の、一方の隣接車線から区分線DLを跨いで自車両Vの直後方側まで設けられた第1の所定領域A1の画像と、他方の隣接車線から区分線DLを跨いで自車両Vの直後方側まで設けられた第2の所定領域A2の画像とについて、それぞれ個別に位置を合わせる。差分値検出部32bは、位置合わせされた異なる時刻の第1の所定領域A1及び第2の所定領域A2の画像データそれぞれの差分値を検出する。後続車両検出部33aは、検出された第1の所定領域A1の差分値と第2の所定領域A2の差分値との隔たりから後続の二輪車を検出する。
(もっと読む)
姿勢認識装置、姿勢認識方法、プログラム及び記録媒体
【課題】載置面上に自由に置かれた物体を高速に認識する。
【解決手段】安定姿勢計算部6は、3次元モデル情報記憶部5から3次元モデルの情報を読み出して、物体が載置面上で静止すると予測される物体の姿勢に対応する3次元モデルの安定姿勢を計算する。2次元投影画像生成部7は、安定姿勢計算部6で計算された安定姿勢の3次元モデルを観測して得られる2次元投影画像を生成する。2次元投影画像記憶部8は、2次元投影画像生成部7により生成された2次元投影画像を記憶する。載置面上に載置された物体の姿勢を認識する際には、画像照合部9は、撮像部101により撮像されて得られた撮像画像と、2次元投影画像記憶部8に記憶された2次元投影画像との一致度を計算する画像照合を行う。姿勢認識部10は、一致度が最も高い2次元投影画像に対応する3次元モデルの姿勢を、物体の姿勢として認識する。
(もっと読む)
1 - 20 / 319
[ Back to top ]