
Fターム[5B057CD12]の内容
Fターム[5B057CD12]に分類される特許
1 - 20 / 948
通過車両検知装置
画像補正装置および画像補正方法
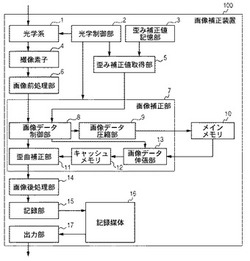
【課題】光学歪み補正の補正率を高める技術を提供する。
【解決手段】画像データ圧縮部9は、ズーム機能を有する光学レンズを介して撮像された画像データを圧縮し、圧縮画像データとしてメモリ10に格納する。歪曲補正部11は、画像データに生じている光学歪みを補正する。画像データ伸張部13は、メモリ10に格納された圧縮画像データを伸張し、歪曲補正部11に補正させる。ここで画像データ圧縮部9は、撮像時の前記光学レンズのズーム値をもとに、メモリ10の容量におさまるように前記撮像された画像データを圧縮する。
(もっと読む)
カメラキャリブレーション装置、乗員支援装置、カメラキャリブレーション用歪み係数生成方法

【課題】広角レンズの歪みを、容量の小さなメモリで高精度に補正するカメラキャリブレーション装置を提供すること。
【解決手段】カメラ50と歪み校正用被写体の相対位置情報から歪みのない理想結像位置を算出する理想結像位置算出手段12と、校正用被写体が撮影された画像からレンズの歪みを含んだ実測結像位置を検出する実測結像位置検出手段11と、結像位置に応じた重みを生成するための重み関数を決定する重み関数決定手段14と、歪み係数を用いて算出される歪み量が含まれる理想結像位置と実測結像位置、及び、結像位置に応じて前記重み関数が生成した重みを、歪み係数の評価関数に入力して、評価関数の演算結果から歪み係数を決定する歪み係数決定手段13と、を有することを特徴とするカメラキャリブレーション装置を提供する。
(もっと読む)
画像処理装置、画像処理方法、および画像処理プログラム
【課題】読取画像データの補正処理の補正精度を向上できる画像処理装置を提供する。
【解決手段】画像処理装置1は、読取対象の媒体に対応する媒体領域40を含む読取画像データから媒体領域40の輪郭情報を抽出して、抽出された輪郭情報に基づいて媒体領域の歪みを補正する読取画像データの画像処理装置1であって、読取画像データを取得する画像取得部11と、読取画像データから媒体領域40の輪郭情報を抽出する輪郭抽出部12と、抽出された輪郭情報を読取画像データ上に表示する画像表示部13と、輪郭情報の読取画像データに対する位置を変更する指示を検出する指示検出部14と、を備える。輪郭抽出部12は、指示検出部14により変更する指示が検出された場合、変更する指示を反映させて、輪郭情報を再抽出する。画像表示部13は、輪郭抽出部12により再抽出された輪郭情報を再表示する。
(もっと読む)
画像処理装置
【課題】画像補正を伴う画像処理装置において、画像補正に用いるパラメータのメモリ量を低減し、あるいはリアルタイム処理時のデータアクセスレートを低減する。
【解決手段】補正情報を補正量格納メモリに格納する際、上記補正量格納メモリには、例えば画素をはじめとする個体ごとに異なる補正量を求めたうえで、これを圧縮して格納する。さらに、隣接する補正量間の相関を用いて補正量のデータを圧縮する。これにより、画像を補正する際の処理量を低減した画像処理装置を提供でき、ハードウェアのコストを低減することもできる。
(もっと読む)
画像処理装置、画像処理方法、コンピュータプログラム
【課題】 曲がり補正が行われる主走査方向の範囲が異なる場合においても、それぞれの範囲においての、適切な補正情報を生成する。
【解決手段】 画像形成部の露光走査の主走査方向の範囲を包含する範囲に対する、前記補正情報を、前記走査線の副走査方向の曲がりの情報に基づいて生成する。そして生成された補正情報のうち、前記露光走査の主走査方向の範囲に基づいた一部の補正情報を特定する。
(もっと読む)
物体認識システム及び物体認識装置
【課題】ラインセンサ等の撮像装置を用いて取得した物体の撮像データを用いてその物体を認識する物体認識システムにおいて、物体の通過速度によって撮像データに含まれる物体の画像が歪むため対象物のテンプレートデータとのマッチングの精度が低下し物体の認識精度が低下するという課題があった。
【解決手段】物体認識部34は、速度検出部32で検出された物体の速度に応じて、撮像装置1、2で取得された撮像データに含まれる物体の画像をサイズ変更し、その変更後の撮像データとテンプレートデータとをマッチングして物体を認識するので、精度高く物体認識ができる。
(もっと読む)
画像読取装置及びその画像読取方法
【課題】照明により撮影対象(例えば書籍など)の白飛現象の発生を防止し、かつ、撮影対象の端部のラインを適切に検出することができる画像読取装置及びその画像読取方法を提供する。
【解決手段】画像読取装置100は、撮影部101と原稿載置面(撮影面)との距離を変化させる方向に伸縮可能なアーム102と、アーム102に設けられて、撮影面に載置された書籍(撮像対象物)を斜め方向から照らす光源部105と、を備える。また、画像読取装置100は、光源部105が、書籍を斜め方向から照らして書籍の端部に影部分を発生させ、発生した影部分を含む撮影データを取り込むデータ取得部と、取り込んだ撮影データに基づいて、撮像対象物のエッジ特徴を検出するエッジ検出部と、を備える。エッジ検出部は、2値化データが、撮像対象物の端面のラインに、所定数以上、連続して発生した場合、エッジ特徴を検出する。
(もっと読む)
画像読取装置及びその画像読取方法
【課題】消費電力を削減しつつ、照明により白飛現象が発生しにくい画像読取装置及び画像読取装置の画像読取方法を提供する。
【解決手段】画像読取装置100は、撮影部101と原稿載置面(撮影面)との距離を変化させる方向に伸縮可能なアーム102と、アーム102に設けられて、撮影面を斜め方向から照らす光源部105と、を備える。MPUは、アーム102の長手方向に並んで設けられたLED105a〜105dのうち、[消灯範囲2]として照明範囲外を照らすLED105aを消灯する。また、MPUは、照明範囲の照度が所定以上の場合、[消灯範囲1]として照明範囲に近いLED105c,LED105dを消灯する。
(もっと読む)
撮像装置および撮像方法
【課題】データ容量が大幅に増大することなく書籍画像の湾曲歪を補正し歪の少ない画像が取得でき、且つ、ポータビリティに優れ、小型で低コストである撮像装置および撮像方法を提供すること。
【解決手段】撮像素子11と、該撮像素子11に被写体の像を結像させる撮影レンズ系2と、前記撮像素子11の信号から画像データを生成する画像生成手段12と、前記画像データを記録する記録手段と、前記被写体の距離を二次元方向で多点測距し測距データを取得する測距手段3と、前記被写体として書籍を撮影する書籍撮影モードが設定可能な撮影モード選択手段と、前記書籍撮影モードが選択されて得られた画像データを、前記測距手段3により取得した測距データに基づいて湾曲歪を補正する制御手段14と、を備えることを特徴とする。
(もっと読む)
画像処理装置
【課題】焦点距離に関する情報がなくても、幾何学的歪みの補正を適切に行う画像処理装置を提供する。
【解決手段】画像処理装置1は、撮像文書画像における水平方向の消失点の位置および垂直方向の消失点の位置を示す消失点情報を生成する消失点情報推定部14と、撮像文書画像におけるコーナーを検出するコーナー検出部15と、水平方向の消失点の位置に集まる2つの線分を上辺および下辺とし、垂直方向の消失点の位置に集まる2つの線分を左辺および右辺とし、検出されたコーナーを囲む四角形の輪郭を輪郭四角形として決定する輪郭決定部16と、輪郭四角形に基づいて、幾何学的補正後の第1画像サイズを決定する画像サイズ決定部19と、上記輪郭四角形と上記第1画像サイズとに基づいた第1補正方法により撮像文書画像に対して幾何学的補正を行う補正処理部20とを備えている。
(もっと読む)
施工補助装置、施工補助方法
【課題】建築物の施工、解体、デザインの製作など、幅広い意味での施工を必要とする施工領域における面積を簡便に算出すると共に、必要となる作業量、作業時間、コスト、材料、素材、材料や素材の量、必要となる機器の種類や大きさなどを推測できる、施工補助装置を提供する。
【解決手段】施工補助装置は、施工対象物100の画像に基づいて、施工対象物100の所定領域の面積を算出する面積算出手段と、施工対象物100の周辺情報を記憶する第1記憶部と、施工対象物100の施工に必要となる要素である施工要素を記憶する第2記憶部と、所定領域の面積、周辺情報および施工要素の少なくとも2以上に基づいて、施工対象物100の施工特性を算出する算出手段と、を備える。
(もっと読む)
画像処理装置および画像処理方法
【課題】1つのパイプライン内に倍率色収差補正と歪曲収差補正とを分けて構成した場合においても、1回の起動でそれぞれに適した入力範囲を正確に算出できる歪補正範囲算出部を備えた画像処理装置および画像処理方法を提供する。
【解決手段】少なくとも、撮像光学系の倍率色収差を補正する倍率色収差補正処理部と、撮像光学系の歪曲収差を補正する歪曲収差補正処理部と、倍率色収差補正後の画像データに画像処理を行って歪曲収差補正処理部に出力する画像処理部とが、1つのパイプラインで構成された画像処理パイプラインと、各構成要素の制御するシーケンサと、予め設定された歪曲収差補正出力範囲と歪曲収差補正座標変換係数とに基づいて歪曲収差補正入力範囲を算出し、さらに、算出した歪曲収差補正入力範囲と、予め設定された画像処理糊代と倍率色収差補正座標変換係数とに基づいて倍率色収差補正入力範囲を算出する歪補正範囲算出部と、を備える。
(もっと読む)
画像処理方法
【課題】予め基準となる画像データを保持する必要がなく且つ簡易に、光軸と穴の中心軸との位置ずれを補正して、パノラマ展開画像に変換することが可能な画像処理方法を提供する。
【解決手段】環状画像から内円及び外円を抽出する工程と、抽出した内円及び外円の中心をそれぞれ求める工程と、極座標変換する際に基準となる展開中心を、内円中心と外円中心との間で順次移動させながらパノラマ展開画像に変換する工程とを備える。これにより、全方位撮像装置10により穴Hの側壁面を撮像した環状画像をパノラマ展開画像に極座標変換する際に、全方位撮像装置10の光軸L1と穴Hの中心軸L2との位置ずれに起因する歪みを補正することができる。
(もっと読む)
車両の運転支援装置
【課題】車両の後側方の撮像画像を、横方向に変化する倍率で拡大又は圧縮してなる画像を表示器に表示させる場合に、自車両の前後方向に延在するはずの白線等の走行領域区分線が表示器に表示される画像中で曲がって表示されるのを防止する。
【解決手段】車両2の後側方を撮像するカメラ3の撮像画像から表示器5に表示させる表示用画像を生成する表示用画像生成手段7は、設定された横方向拡縮倍率で撮像画像の各部を横方向にスケール修正する横スケール修正処理と、この横スケール修正処理により撮像画像から生成される横スケール修正画像中で曲がって表示される走行領域区分線21の画像が直線状に延在する画像になるように設定された縦方向拡縮倍率で横スケール修正画像を部分的に縦方向にスケール修正する縦スケール修正処理とを実行することにより、表示用画像を生成する。
(もっと読む)
画像処理装置、画像処理方法、及び画像処理プログラム
【課題】歪円形画像に撮像される撮像対象の把握性を向上させることができる画像処理装置、画像処理方法及び画像処理プログラム等を提供する。
【解決手段】魚眼画像を魚眼画像用モニタ2に表示可能な魚眼画像データに変換し、所定の位置を基準とした所定の範囲内の魚眼画像を、平面正則画像用モニタ3に二次元的に視認可能に表示する平面正則画像データに歪補正し、魚眼画像データ又は、平面正則画像データを、選択的に出力する。
(もっと読む)
事故解析装置、事故解析方法、および、プログラム
【課題】自動車のような移動体において、事故解析になるべく適した画像を、より簡易な方法によって得る技術を提供することを目的とする。
【解決手段】車両に設置された事故解析装置(6)は、当該車両について複数方向からみた車体画像を記憶する記憶部(67)と、当該車両の周辺を撮像する撮像部(10)と、当該車両と物体の接触位置および接触方向を特定する接触特定部(66)と、接触特定部(66)で特定された接触位置および接触方向に応じて、当該車両と物体の接触状況が視覚化される仮想視点からみた車体画像を記憶部(67)から選択する選択部(66)と、撮像部(10)で撮像された周辺画像を、その仮想視点からみた座標の画像に変換する座標変換部(63)と、座標変換部(63)で座標変換された周辺画像と、選択部(66)で選択された車体画像と、を合成して保存する合成部(64)と、を備える。
(もっと読む)
画像検査装置、画像検査方法、及びプログラム
【課題】多種多様な定型帳票を対象に、帳票種識別を精度良く行う。
【解決手段】基準画像を入力する基準画像入力手段と、被検査画像を入力する被検査画像入力手段と、基準画像と被検査画像とを整合する画像整合手段と、整合された画像に対して座標変換処理を施すことにより複数のパラメータを算出する算出手段と、複数のパラメータの各値と、複数のパラメータのそれぞれに対応して予め定められた複数の基準値とをそれぞれ比較する比較手段と、比較手段の比較結果に基づいて、被検査画像の受け入れの可否を判断する判断手段と、を含む。
(もっと読む)
画像生成方法、画像生成装置、及び操作支援システム
【課題】旋回動作可能な被操作体に取り付けられる撮像手段が撮像する入力画像に基づいて生成される出力画像を見易く表示する画像生成装置を提供すること。
【解決手段】旋回動作可能な上部旋回体63に取り付けられたカメラ2が撮像する入力画像に基づいて出力画像を生成する画像生成装置100は、上部旋回体63の旋回状態を検出する旋回状態検出手段120と、上部旋回体63のCG画像70を出力画像上に重畳表示するCG画像表示制御手段121と、出力画像の更新状態を制御する出力画像更新制御手段122と、を備え、旋回状態検出手段120が旋回の開始を検出した場合に、CG画像表示制御手段121はCG画像70を出力画像上で旋回させる。
(もっと読む)
撮像装置及びプログラム
【課題】撮影した被写体画像に人物が含まれるか否かに係らず、被写体画像に歪みが少なく違和感の無い自然な画像を取得する。
【解決手段】撮像装置100が、被写体を撮像する電子撮像部2等と、電子撮像部2によって撮像された被写体画像の歪み補正処理を行う歪曲収差補正部7aと、電子撮像部2によって撮像された被写体画像の中の顔領域を認識する顔領域認識部6aと、顔領域認識部6aによって認識された顔領域の被写体画面内での位置を検出する顔領域位置検出部6bと、顔領域位置検出部6bによって検出された位置に基づいて、歪曲収差補正部7aによる歪み補正の度合を判定する判定部11bと、を備える。
(もっと読む)
1 - 20 / 948
[ Back to top ]