
Fターム[5B057CD20]の内容
Fターム[5B057CD20]に分類される特許
201 - 220 / 416
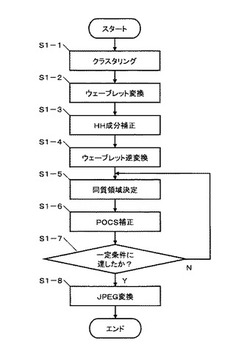
画像処理方法、画像処理装置、画像処理プログラム、及び、記録媒体
【課題】圧縮率を高くしても画質が劣化しにくいJPEG圧縮画像を得る、画像処理装置、画像処理方法、及び、画像処理プログラムを提供する。
【解決手段】原画像を所定の大きさのブロックに分解し、各ブロックに対してウェーブレット変換を行い、ウェーブレット変換により求められたウェーブレット係数をブロックノイズが低減するように補正した後、逆ウェーブレット変換を行って画像を再構成するウェーブレット処理手順と、各ブロックの画素を色相及び明度に基づいて同質となる画素の集合に分類し、同質と見なされた画素集合の画素の画素値を該画像集合の平均の画素値を中心とした許容誤差範囲内となるように補正する補正手順と、補正手順で補正された画素集合が一定の条件に達していない場合には補正手順で補正された画素集合からなる画像に対して再度、補正手順を行い、JPEG変換を行う、画像処理手順とを有する。
(もっと読む)
人数計測システム

【課題】建屋内もしくは室内に滞留する人数を計測する。
【解決手段】人物検出手段は人の出入りする場所の上方に設けられた複数台のカメラからなる撮像手段からの画像データにより距離情報を得るから、床上の影の距離情報と人物の距離情報とから区別して人物を検出することができ、人物計数手段は検出された人物について移動を追跡し、移動方向を検出してその人数を計数し、滞留人数計数手段において正確に滞留人数を計数することかできる。
(もっと読む)
画像処理装置
【課題】 車両周辺に存在する立体物を正確に認識し表示することができる「画像処理装置」を提供する。
【解決手段】 画像処理装置100は、撮像カメラにより撮像された撮像データを受け取り、トップビュー画像を生成する視点変換部120と、撮像カメラにより撮像された撮像データから立体物を検出し、立体物を抽出する立体物抽出部122と、立体物抽出部122により抽出された立体物に応じた立体物画像を生成する立体物画像生成部124と、視点変換部120により生成されたトップビュー画像に、立体物画像生成部124により生成された立体物画像を合成する画像合成部126を含んでいる。
(もっと読む)
画面切り替え判定装置、車両周辺監視装置および画面切り替え判定方法
【課題】監視用画面の適切な切り替えの有無の判定を迅速に行うことができ、ユーザの意思に沿わない不適切な監視用画面の表示を未然に防ぐ一方で、適切な監視用画面については、運転操作の支援に好適な画像の変化が滑らかな状態として表示することができる「画面切り替え判定装置、車両周辺監視装置および車両周辺監視方法」を提供すること。
【解決手段】画面切り替えが指示された後にフレームメモリ37に実際に格納される監視用画面12,20,30についてのフレームの変化にともなう特定の画素位置に対応する画素データの変化の有無に基づいて、画面切り替えが指示された後にフレームメモリ37に格納される監視用画面12,20,30が、切り替え後監視用画面であるか否かを判定する。
(もっと読む)
カメラ校正装置及び方法並びに車両
【課題】カメラ設置誤差の影響を抑制しつつ、校正環境整備の簡便化に寄与する。
【解決手段】車両に前カメラ、右カメラ、左カメラ及び後カメラを設置し、前−右カメラ間、前−左カメラ間、後−右カメラ間、後−左カメラ間の夫々の共通撮影領域(3FR、3FL、3BR及び3BL)内に、2つずつ特徴点(211〜218)を配置する。カメラ校正装置は、各カメラの撮影画像を地面上に投影して合成するための変換パラメータを導出する。左右カメラに対する変換パラメータを透視投影変換によって求める。その後、各カメラの撮影による各特徴点の座標値対応関係に基づき、左右カメラに対する変換パラメータに合わせこむように前後カメラに対する変換パラメータを平面射影変換によって求める。
(もっと読む)
運転支援装置、方法およびプログラム
【課題】ユーザが車両周囲に存在する物体の状況を認知しやすい運転支援装置を提供する。
【解決手段】車両周囲を撮像する撮像部200と、音波・電波・レーザ等を照射し反射波を受信することにより、あるいは、撮像部200からの撮像画像を処理することにより、周囲の障害物の有無、あるいは、距離や方向を検知する物体検知センサ100と、ユーザに車両周辺の様子を示す表示部300と、車両周囲において、物体検知センサ100が物体を検知しなければならない予め決められた領域を保持する記憶部500と、車両周囲を撮像した画像に記憶部500に保持された領域を重畳して表示部300に表示させる表示制御部410を備える。
(もっと読む)
グラウンドトルース・データからの合成画像及びビデオの生成
【課題】ビデオを生成するシステム及び方法を開示する。
【解決手段】物体情報が受信される。基準点に対する物体の動きのパスが生成される。基準フレームの一連の画像及びグラウンドが、グラウンドトルース、及び生成されたパスから生成される。画像を生成するシステム及び方法を開示する。物体情報が受信される。画像データ及びグラウンドトルースを、位置、画像記述、カメラ特性、及び画像歪みパラメータを用いて生成することができる。文書と基準点との間の位置関係が判定される。文書及びグラウンドトルースの画像が、物体情報及び位置関係から、かつ、文書のユーザ指定環境に応じて生成される。
(もっと読む)
超音波診断装置
【課題】視点を変更しながら対象組織の三次元超音波画像を表示する場合、どの方向から見たものであるかを理解困難であった。
【解決手段】組織全体の三次元超音波画像を表示している段階で視点を変更し、正面に相当するものが表示された段階でSETボタンが操作される。これによって基準方向が登録される。対象組織の三次元画像を表示する場合には、基準方向を基準として観察方向を相対的に指定することが可能である。例えば右側面ボタンを操作すれば、基準方向を正面とした場合における右側面方向から見た対象組織の三次元超音波画像を表示することができる。
(もっと読む)
欠陥検出装置および欠陥検出方法
【課題】欠陥の誤検出を低減することができる欠陥検出装置および欠陥検出方法を提供する。
【解決手段】時間遅れ座標系変換部24は、周期パターンが形成された検査対象物の画像を構成する各画素の画素値からなるデータを次元m(mは2以上の整数)の時間遅れ座標系のデータに変換する。欠陥検出部25は、m次元空間上で時間遅れ座標系のデータの示す位置が所定領域に含まれるか否かを判定し、判定結果に基づいて欠陥を検出する。
(もっと読む)
画像復元装置、画像復元方法及び画像復元プログラム
【課題】リンギングを抑制しながら鮮明さを確保可能なウィーナフィルタを使用した画像復元を行う。
【解決手段】撮像装置から得られる画像の振れを表す振れ検出情報を含む劣化画像情報を、ウィーナフィルタを使用して原画像情報を復元する画像復元装置であって、前記劣化画像情報に含まれる前記振れ検出情報に基づいて前記ウィーナフィルタの点広がり関数を推定する点広がり関数推定手段(ステップS7)と、前記劣化画像情報から切り出した局所領域画像情報毎に前記点広がり関数と最適な近似定数とに基づいて算出される前記ウィーナフィルタの周波数応答に基づいて局所領域復元画像情報を生成する画像復元手段(ステップS8〜S18)とを有する。
(もっと読む)
ファイル生成方法および装置並びに立体画像の表示制御方法および装置
【課題】立体表示や三次元形状認識に利用される三次元情報が、その三次元情報を取得した撮像系に固有の座標系で表されていることに起因する種々の問題を解決する。
【解決手段】複数の撮像系に共通する共通座標系を定義し、撮像系に固有の座標系の原点Onを基準位置としたときの共通座標系の原点Ouの変位を表す変位情報を、ファイル生成装置内のメモリに記憶せしめておく。三次元情報を含むファイルを生成するときは、ファイルヘッダHの所定領域h8に、メモリに記憶されている変位情報を格納しておく。ファイルに記録された三次元情報を利用した処理を行うときには、変位情報を使って固有座標系で表現された三次元情報を共通座標系で表現された三次元情報に変換してから処理を行う。
(もっと読む)
撮像表示システム
【課題】撮像表示システムにおいて、カメラの数が増加しても、ハードウェアの構成の規模が大幅に増大するのを防止する。
【解決手段】撮像表示システム(100)に用いられるCMOSカメラ部11は、景色V1が投影されるCMOSイメージセンサ11aと、CMOSイメージセンサ11aの撮像素子のうち任意の撮像素子から像信号を読み出すタイミング発生器11bと、画質を調整する画質調整部およびビデオ信号形式でエンコードするNTSCエンコーダを有するカメラ信号処理部11cと、CMOSイメージセンサ11aに投影された元の像G1からモニタ部30に表示しようとする俯瞰像G1′への像変形の位置関係を、俯瞰像G1′を基準として規定するマッピングテーブルが記憶されたメモリ11dとを備え、タイミング発生器11bは、マッピングテーブルにより特定される撮像素子から像信号を読み出す。
(もっと読む)
円筒体外観検査方法
【課題】円筒体を回転させること無く、より正確な検査を行うことができる円筒体外観検査方法を提供する。
【解決手段】基準となるワークの側面画像を円筒展開して曲面部分が平坦に展開された変換画像を取得する。ワークの回転と変換画像の取得を繰り返して変換画像を全周に渡って取得して合成し、ワーク全周の基準画像を形成する。検査対象のワークの側面画像に表示されたワーク像の正面部分を円筒展開して正面展開画像を生成し(S3)、正面展開画像と基準画像をパターンマッチングする(S4)。そのマッチングの度合いに基づいてワークの検査を実施する(S5)。
(もっと読む)
画像処理プロセッサ
【課題】画像処理プロセッサを形成するためのシステムと手法を提供する。
【解決手段】 画像処理システムは、目標画像生成要素と、当該目標画像生成要素に連なる歪曲画像算出要素と、当該歪曲画像算出要素に連なる偏心推定器と、前記歪曲画像算出要素に連なる偏心補償器と、当該偏心補償器に連なる歪曲中心窩画像モデラーと、偏心補償器に連なるログポーラ画像生成器と、前記偏心補償器に連なり、信頼性の低い特徴を除去する特徴除去器とを含む。前記システムを形成するための手法も記載される。
(もっと読む)
運転支援装置
【課題】旋回時、実カメラを固定設置としながらも、視線を余り動かすことなく進行方向を注視し続けることができる手法を提案することで、より高い安全性を確保する運転支援を達成することができる運転支援装置を提供すること。
【解決手段】車両に固定設置したリアカメラ1とは異なる位置に設定した仮想カメラ8と、リアカメラ1により映し出される被写体側に設定した仮想投影面と、を用いた視点変換により、リアカメラ1のカメラ映像データから車室内のモニタ3に映し出すモニタ画像データを生成するモニタ画像データ生成手段を備えた運転支援装置において、モニタ画像データ生成手段は、車両旋回時、ハンドル操舵角センサ4により検出された中立位置からのハンドル操舵角θの大きさに応じて仮想カメラ8を車両の旋回方向に自転させ、自転する仮想カメラ8を用いた視点変換により、モニタ3に映し出すモニタ画像データを生成する手段とした。
(もっと読む)
運転支援装置
【課題】旋回時、運転場面に応じた最適なモニタ映像の表示変更制御を行うことで、的確な駐車操作支援や安全確認支援を達成することができる運転支援装置を提供すること。
【解決手段】車両に設置したリアカメラ1とは異なる位置に設定した仮想カメラ8と、リアカメラ1により映し出される被写体側に設定した仮想投影面と、を用いた視点変換により、リアカメラ1のカメラ映像データから車室内のモニタ3に映し出すモニタ画像データを生成するモニタ画像データ生成手段を備えた運転支援装置において、モニタ画像データ生成手段は、旋回後進時、ハンドル操舵角センサ4による中立位置からのハンドル操舵角θの大きさが大きいほど前記近景用スクリーン71と前記近景用CCD91による俯瞰映像領域3Bを拡大し、仮想カメラ8と領域制御による仮想立体スクリーン7及び仮想立体CCD9を用いた視点変換により、モニタ3に映し出すモニタ画像データを生成する手段とした。
(もっと読む)
運転支援装置
【課題】旋回時、運転場面に応じた最適なモニタ映像の表示変更制御を行うことで、的確な駐車操作支援や安全確認支援を達成することができる運転支援装置を提供すること。
【解決手段】車両に設置したリアカメラ1とは異なる位置に設定した仮想カメラ8と、リアカメラ1により映し出される被写体側に設定した仮想投影面と、を用いた視点変換により、リアカメラ1のカメラ映像データから車室内のモニタ3に映し出すモニタ画像データを生成するモニタ画像データ生成手段を備えた運転支援装置において、モニタ画像データ生成手段は、旋回後進時、ハンドル操舵角センサ4による中立位置からのハンドル操舵角θの大きさが大きいほど斜め視点映像領域3Pの斜め視点映像を俯瞰映像化し、仮想カメラ8と俯瞰映像化制御による仮想立体スクリーン7及び仮想立体CCD9を用いた視点変換により、モニタ3に映し出すモニタ画像データを生成する手段とした。
(もっと読む)
画像検出装置、プログラム及び画像検出方法
【課題】 従来のテンプレートマッチング処理は、単純にテンプレートと類似した画像を検索するため、誤検出が多くなる問題がある。本発明は、人物などの左右対称性のある物体形状を正確に検出する画像検出技術を提供することを目的とする。
【解決手段】 撮影装置1で撮影した画像から、検出対象候補検出手段3においてテンプレートマッチングにより検出対象候補を検出する。対称画像生成手段4において、検出対象候補の画像を画像の中央縦線で2分割し、一方の画像を反転させる。対象性検出手段6において、反転画像と他方の画像を比較し、対称画像の類似度を算出し、類似度と閾値を比較して左右対称性のある画像を検出する。
(もっと読む)
駐車支援装置の画像表示方法及び駐車支援装置
【課題】ドライバーが理解しやすい画面を表示することができる駐車支援装置の画像表示方法及び駐車支援装置を提供する。
【解決手段】車両に搭載された駐車支援システム1の制御ユニット2において、車両に設けられたカメラ20から撮影データGを取得し、撮影データGを用いた合成画像をディスプレイ8に出力する画像プロセッサ15を備えた。画像プロセッサ15は、車両を進行方向の斜め上方に設定された視点から俯瞰した車両画像を、車両の現在位置に相当する位置に出力する。
(もっと読む)
対象領域分割方法及び対象領域分割装置
【目的】画像から対象を含む領域を正しく分割する「対象領域分割方法及び対象領域分割装置」を提供することである。
【構成】画像から対象を含む領域を分割する対象領域分割装置であり、対象(車輌)の参照幅を予め設定する設定部と、画像から対象の底部の陰を抽出し、該抽出した底部の陰(車下陰)に基づいて画像における対象(車輌)を含む候補領域を確定する抽出及び確定部、参照幅が画像における車下陰の位置で結像する幅(結像幅)を計算する結像幅計算部、参照幅の結像幅と前記車下陰とに基づいて候補領域に対象が含まれるように該候補領域のサイズを調整する領域サイズ調整部、記画像から調整後の候補領域を、対象を含む対象領域として分割する対象領域分割部をそなえている。
(もっと読む)
201 - 220 / 416
[ Back to top ]