
Fターム[5B057CE08]の内容
画像処理 (340,757) | 処理部 画像基本処理 (31,097) | 合成 (6,208)
Fターム[5B057CE08]に分類される特許
141 - 160 / 6,208
画像出力システムおよび画像出力方法、並びに、画像出力受付端末およびプログラム
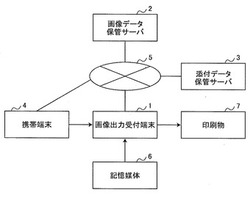
【課題】画像上に、付加情報に基づく印刷オブジェクトを重ねて印刷することが可能な画像出力システム等を提供する。
【解決手段】画像出力受付端末1は、画像データの印刷とともに添付データの添付指示を受け付けた場合、その添付データを添付データ保管サーバ3に送信し、そこに保管させる。次に、添付データ保管サーバ3から添付データの保管場所に関するデータを受信し、コード化する。次に、コード化した保管場所に関するデータをスタンプデータに電子透かしとして埋め込む。次に、保管場所に関するデータが埋め込まれたスタンプデータを画像データに重ねて印刷し、印刷物7として提供する。携帯端末4は、印刷物7上に印刷されているスタンプを内蔵カメラで撮影し、スタンプに埋め込まれたコードを読み取る。次に、コードに示された保管場所に関するデータに基づいて、添付データ保管サーバ3にアクセスし、添付データを受信し、出力する。
(もっと読む)
車両周辺画像表示制御装置

【課題】実画像と履歴画像を合成して車両周辺画像をディスプレイに表示する車両周辺画像表示制御装置において、撮影画像の取得タイミングと車両移動量情報の取得タイミングが異なっている状況で、実画像と履歴画像のずれを従来よりも低減する。
【解決手段】車両周辺画像表示制御装置5は、時点t1において車両移動量情報を取得した場合、当該取得した車両移動量情報に基づいて、時点t1後に撮影画像を取得する予定の時点t11〜t13における車両移動量を推定し、時点t11〜t13のそれぞれにおいて撮影画像を取得すると、今回取得した撮影画像に基づく画像を実画像とし、また、時点t1に推定された現時点t11〜t13における予想移動量に基づいて、時点t11〜t13における車両と周囲の実際の位置関係に合致するよう、過去の撮影画像から履歴画像を作成し、この履歴画像を実画像と合成して表示する。
(もっと読む)
運転支援装置
【課題】車載カメラを用いて障害物に対して通過が可能か等の視覚支援をドライバーに与えて運転支援を実現する。
【解決手段】車両15に設置された前方カメラ111の画像に消失線を重畳させて表示し、進行あるいは後行方向における障害物と車両15の接触に関する予測を可視化できるようにした。これにより、ドライバーは、降車による目視、確認作業が必要であるような車両と構造物距離が近く通り抜けが困難なシーンにおいても、車室内にて直視的に接触可能性を判断することが可能となる。
(もっと読む)
画像処理装置及び画像処理装置の制御方法
【課題】ダイナミックレンジを拡大するため、多重露光撮影によって得られた画像を加算するによる場合において、撮像条件によらず露出オーバーとならないように制御する。
【解決手段】多重露光装置において、撮影モードに応じて、複数の画像を画素値比較によっていずかの画像の画素値を選択して合成を行う合成処理と、複数の画像を加算あるいは減算により合成を行う合成処理を切り替える。
(もっと読む)
ガイド装置付きカメラおよびガイド付き撮影方法
【課題】 コミュニケーションをとる相手の使用言語が不明の場合であっても言語を判定することのできるガイド装置およびガイド方法を提供する。
【解決手段】 画像記録時に、時計情報や設定したキーワード情報等の関連情報を画像に関連付けを行なう。また表情等によりステップS45において関連付けの候補を選択し、後述するステップS17で選択したフレーズ等の言語情報の関連付けを行なう。次に、関連付けを行なう情報が言語情報か否かの判定を行なう(S7)。判定の結果、言語情報ではない場合には、スキップして次のステップS9に進み、言語情報の場合には、その言語を翻訳する(S8)。すなわち、被写体20の使用言語でも関連付け情報が添付されるように翻訳を行なう。続いて、画像データの記録を行う(S9)。
(もっと読む)
画像処理装置及び方法、記録媒体、並びにプログラム
【課題】簡素な構成で容易に、略球面体が撮像された画像の高画質化を図ることができるようにする。
【解決手段】動きベクトル検出部は、略球面の被写体を含む複数の撮像画像のうち、処理対象の1枚と、比較対象の他の1枚とについての、被写体についての比較を、複数の撮像画像の各々を処理対象として実行し、処理対象についての3次元球面モデル全体についての動きベクトルを検出する。動き補償部は、複数の撮像画像の各々の動きベクトル検出部により検出された動きベクトルに基づいて、処理対象に動き補償を施す。合成部は、動き補償部による動き補償が施された結果得られる撮像画像の各々を合成する。本技術は、画像処理装置に適用することができる。
(もっと読む)
立体感提示装置および方法ならびにぼけ画像生成処理装置,方法およびプログラム
【課題】片眼でも立体感を得ることができる立体感提示装置を提供する。
【解決手段】間隔をおいて配置された2台のカメラから出力されるステレオ画像データを構成する左右の画像データに基づいて距離画像データを生成する距離画像生成手段53と,生成された距離画像データを用いて,上記の左または右の画像データに,距離に応じた焦点ぼけを与えてぼけ画像データを生成するぼけ画像生成手段55を備える。生成されたぼけ画像データに基づいて対象の焦点ぼけ画像を表示装置に表示する。
(もっと読む)
画像処理装置及びその制御方法
【課題】安価な構成で、水平方向の画素数が一度に読み出し可能な最大画素数よりも多い画像データを、画像処理を施して出力することのできる技術を提供する。
【解決手段】本発明の画像処理装置は、記憶手段と、読み出し手段と、画像処理手段と、出力手段と、を有し、記憶手段に記憶された画像データの水平方向の画素数が、読み出し手段で一度に読み出し可能な最大画素数よりも多い場合に、読み出し手段は、記憶手段から、1ライン分の画像データを複数の分割データに分けて順に読み出し、画像処理手段は、読み出し手段で分割データが読み出される度に、該読み出された分割データに対して画像処理を施し、出力手段は、画像処理手段で分割データに画像処理が施される度に、該画像処理が施された分割データを入力し、画像処理が施された同じラインの複数の分割データを合成して1ライン分の画像データとして出力する。
(もっと読む)
ドットパターンが印刷された地図
【課題】 地図等に印刷されたドットパターンの同一の領域に複数の情報を定義して、撮像手段による撮像動作等によってそれらの情報を選択的に出力させることのできる、利便性に富んだ媒体とその情報出力を実現する。
【解決手段】 情報がパターン化されたドットパターンが印刷された地図であって、ドットパターンは、コード値と、前記地図上の位置に対応した座標値と、が一つのフォーマットによりパターン化されたドットパターンであり、スキャナによって、地図上のドットパターンが読み取られると、ドットパターンによりパターン化された、コード値および/または座標値に対応した情報が出力される地図とした。
(もっと読む)
画像処理装置、および画像処理プログラム
【課題】複数枚の撮像フレーム間における、撮像されている人物の顔等の対象オブジェクトの向きの違いを考慮し、この対象オブジェクトについて高精細な画像を生成することができる画像処理装置提供する。
【解決手段】画像処理部4は、画像入力部3に入力されたフレーム画像の中から、対象オブジェクトが撮像されているフレーム画像を、予め定めたフレーム数取り込み(s1)、基準とする基準フレーム画像を選択する(s2)。画像処理部4は、基準フレーム画像として選択しなかった非基準フレーム画像毎に、対象オブジェクトの向きを、基準画像における対象オブジェクトの向きに合わせる非剛体変形を行う(s3)。画像処理部4は、非剛体変形を行った非基準フレーム画像を用いて、対象オブジェクトについて高精細画像を生成する(s4)。
(もっと読む)
画像処理装置および画像処理方法、プログラム
【課題】 複数の撮像画像データからパノラマ画像のような結合画像データを高解像度で生成することを目的とする。
【解決手段】 超解像処理が行えるように、結合シーンの各位置を撮像装置により複数回撮影すべく撮像装置の撮影条件を決定し、決定された撮影条件により撮影された複数の撮像画像データに基づいて超解像処理を行い、解像度の大きい結合画像データを生成する。
(もっと読む)
情報埋込装置、情報復元装置、情報埋込方法、情報復元方法、情報埋込プログラム及び情報復元プログラム
【課題】
ドットフレームを配置することなく、情報埋め込みを可能とする。
【解決手段】
オブジェクトを表す原画像を取得し、該原画像から、オブジェクト全体の形態を一定に保持しつつ、オブジェクトのエッジ部分に情報を埋め込んだ情報埋込画像を生成するものであって、情報埋込画像の四隅それぞれに、所定の画素領域から構成されるフレームマーカを配置するフレームマーカ配置部と、フレームマーカのうちいずれか一つを基準として、オブジェクト側に所定の画素領域から構成される方向検出マーカを、情報埋込画像に配置する方向検出マーカ配置部とを備える。
(もっと読む)
画像処理方法、撮像装置、画像処理装置、および、画像処理プログラム
【課題】リフォーカス画像の解像度に対するピント位置の依存性を低減し、高解像なリフォーカス画像を取得可能な画像処理方法を提供する。
【解決手段】画像処理方法は、被写体面の同一位置からの光線を結像光学系の瞳領域に応じて撮像素子の異なる画素に入射させることにより得られた入力画像を取得する取得ステップと、指定されたピント位置に対応する仮想結像面の第1の位置を設定する第1の設定ステップと、出力画像の見かけの画素ピッチの最大値が、第1の位置の出力画像の見かけの画素ピッチの最大値よりも小さくなる仮想結像面の第2の位置を設定する第2の設定ステップと、仮想結像面を第2の位置に設定した状態で出力画像を生成する生成ステップとを有する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】多彩なアレンジが可能な3D画像を生成すること。
【解決手段】3D画像取得部42は、左右の視差を有する3D画像データを取得する。遠景近景分離部44は、取得した3D画像データについての左右の画像のそれぞれから、遠景領域と近景領域を分離する。遠景絵画画像生成部45は、遠景近景分離部44により分離された左右の画像のそれぞれの遠景領域に絵画変換処理を施して、少なくとも1つの遠景絵画画像のデータを生成する。遠景絵画3D画像生成部46は、左右の画像のそれぞれについて、遠景絵画画像生成部45により生成された遠景絵画画像のデータと、分離手段により分離された近景領域についての近景部分画像のデータを合成することによって、遠景絵画3D画像データを生成する。
(もっと読む)
画像表示方法および装置
【課題】蛍光画像などの特殊画像を表示する画像表示装置において、特殊画像における発光部分の被観察部における位置を正確に把握でき、かつ発光部分の階調などの情報を正確に表した画像を表示する。
【解決手段】可視光の被観察部への照射によってその被観察部から発せられた光に基づく可視画像と可視光とは異なる波長帯域の特殊光の被観察部への照射によってその被観察部から発せられた光に基づく特殊画像とを取得し、可視画像が有する画像情報のうちの一部の情報を抽出して抽出画像を生成し、その生成した抽出画像を特殊画像上に重ね合わせた重ね合せ画像を生成し、その生成した重ね合せ画像を表示する。
(もっと読む)
対象画像検出デバイス、その制御方法、制御プログラム、および該プログラムを記録した記録媒体、ならびに対象画像検出デバイスを備えた電子機器
【課題】顔画像の検出結果を迅速に出力する。
【解決手段】デジタルカメラ10の制御部20は、撮影画像の中から顔画像を検出する対象画像検出デバイスである。制御部20は、撮影画像を取得する画像取得部22と、顔画像を検出するための複数の検出条件のうち、前回の検出条件とは異なる検出条件に決定する条件決定部23と、画像取得部22が取得した撮影画像に対し、条件決定部23が決定した検出条件で、顔画像を検出する顔検出部24と、検出された顔画像の位置情報を画像合成部17に出力する位置情報出力部26とを備えている。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】オブジェクトのまとめ処理に高い負荷がかかることなく、ビットマップ画像データの生成処理を高速化することを目的とする。
【解決手段】印刷ジョブを解析する解析手段と、解析手段での解析の結果に基づいて、印刷ジョブに含まれる複数のオブジェクトを最大個数に応じて1つのオブジェクトにまとめる最適化手段と、最適化手段でまとめられたオブジェクトに基づき中間データを生成する中間データ生成手段と、中間データ生成手段で生成された中間データから画像データを生成する画像データ生成手段と、を有し、最適化手段は、まとめるオブジェクトの種別によって、まとめるオブジェクトの最大個数を切り替えることによって課題を解決する。
(もっと読む)
画像形成装置、画像形成方法及び画像形成プログラム
【課題】画像データの出力先となる画像形成装置において不正コピーの抑制方法を変更することが可能な画像形成装置、画像形成方法及び画像形成プログラムを提供することを目的としている。
【解決手段】原稿を読み取って画像データとする読み取り手段と、前記画像データに前記原稿の複製を抑制する複製抑制情報を付加する複製抑制情報付加手段と、前記連携出力により、前記他の画像形成装置により前記複製抑制情報が付加された前記画像データを出力する際に、前記他の画像形成装置における前記画像データの複製の抑制方法を特定する機器連携情報を前記複製抑制情報に埋め込む機器連携情報付加手段と、を有する。
(もっと読む)
画像処理装置、方法、及びプログラム
【課題】自然な見え方の合成画像を提示可能な画像処理装置、方法、及びプログラムを提供する。
【解決手段】画像処理装置は、第1算出手段と、選択手段と、抽出手段と、第2算出手段と、決定手段と、生成手段と、を備える。第1算出手段は、被写体を含む第1画像から前記被写体の姿勢情報を算出する。選択手段は、衣服を含む複数の第2画像から、前記姿勢情報に対応する第2画像を選択する。抽出手段は、前記第1画像の第1輪郭から前記被写体の第1特徴を抽出し、前記第2画像の第2輪郭から第2特徴を抽出する。第2算出手段は、前記第1特徴と前記第2特徴との第1ずれ量を算出する。決定手段は、前記第1ずれ量が大きいほど高い透過度を決定する。生成手段は、前記第1画像と、前記透過度に変更した前記第2画像と、を合成した合成画像を生成する。
(もっと読む)
駐車支援装置及び駐車支援方法
【課題】駐車場の設計態様などの影響を受けることなく、任意の駐車目標スペースを駐車支援の対象として設定することができる駐車支援装置を提供する。
【解決手段】自車両の周囲の俯瞰画像に、自車両に対して所定位置に配置された仮駐車設定枠が重畳された設定情報を生成し、ディスプレイに提示する設定情報提示機能と、仮駐車設定枠の自車両に対する位置を変更し、変更された仮駐車設定枠の位置を含む設定指令を受け付ける設定指令取得機能と、自車両に対する位置が設定された仮駐車設定枠に対応する駐車スペースを、自車両を駐車する駐車目標スペースとして設定する駐車目標スペース設定機能と、設定された駐車目標スペースに自車両を誘導する車両誘導機能と、を実行する制御装置10を備える。
(もっと読む)
141 - 160 / 6,208
[ Back to top ]