
Fターム[5B057CE09]の内容
画像処理 (340,757) | 処理部 画像基本処理 (31,097) | 切出 (1,911)
Fターム[5B057CE09]に分類される特許
41 - 60 / 1,911
偏光画像による車両位置検知方法及びシステム
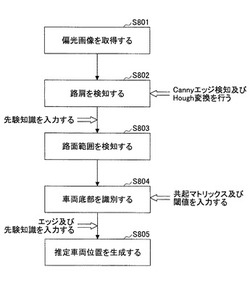
【課題】偏光画像による車両位置検知方法及びシステムを提供する。
【解決手段】かかる方法は、偏光カメラにより路面の偏光画像を取得する段階と、取得された前記偏光画像中の路面及び路肩の違いに基づいて、前記偏光画像中の路肩を算出し、算出された路肩間の部分を路面部分と決定する段階と、前記偏光画像における車両の車輪の画素値と実際の路面の画素値との顕著な差に基づいて、決定された前記路面部分における少なくとも一つ以上の推定車両底部を識別する段階と、識別された前記推定車両底部の各々に対し、前記偏光画像における車両の輪郭の画素値と背景の画素値との差に基づいて、対応する推定車両底部による推定車両位置を取得する段階を含む。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム及び画像処理システム

【課題】画像データに含まれる原稿領域の辺の境界線を構成する画素を検出した候補画素に基づいて境界線を算出する精度を向上する。
【解決手段】画像処理装置10は、原稿領域を含んだ画像データを入力する画像入力部60と、原稿領域の辺の境界線を構成する画素の候補となる候補画素を検出する候補画素検出部61と、原稿領域の辺毎に、境界線の複数の部位においてそれぞれ検出された候補画素の座標を複数の座標グループに分類する分類部63と、複数の座標グループ毎に属する座標に基づいて、境界線の複数の近似直線を算出する近似直線算出部68と、複数の近似直線のうち、近似直線から所定の距離の範囲にある候補画素数が最も多い近似直線に基づいて、辺の境界線の仮直線を決定する仮直線決定部69と、仮直線に基づいて原稿領域の画像を切り出だす画像切出部67を備える。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム及び画像処理システム
【課題】原稿を読み取った画像データにフレアが発生した場合における原稿領域のエッジの検出精度を向上する。
【解決手段】画像処理装置10は、原稿領域を含む画像データを入力する入力部と、画像データの所定方向と平行なラインに沿って画像データの2値化画像を所定検出パターンで走査することにより、原稿領域の境界線を構成するエッジ点の第1候補を検出する第1候補検出部51と、ラインに沿って隣接する画素同士の微分値に基づいてエッジ点の第2候補を検出する第2候補検出部52と、第1候補よりも第2候補の方が原稿領域の内側に位置する場合に、第2候補をエッジ点と決定し、そうでない場合に第1候補をエッジ点と決定するエッジ点決定部53を備える。
(もっと読む)
道路付属物検出装置、道路付属物検出方法、及びプログラム
【課題】道路標識やガードレールなどの道路付属物を高精度に自動的に検出する。
【解決手段】記憶装置6は検出対象とする道路付属物の画像特徴情報36及び、対象空間における検出対象の形状などに関する形態特徴情報38を予め格納する。画像分割手段20は対象空間を撮影した画像をそれぞれ類似する画素からなる複数の部分画像領域に分割する。候補画像領域抽出手段22は画像特徴情報36に基づいて、部分画像領域のうち検出対象に対応した候補画像領域を抽出する。壁面検出手段24は、対象空間の地物表面の三次元形状を表す点群データに基づいて地物の壁面を検出する。候補壁面抽出手段26は形態特徴情報38に基づいて、検出された壁面のうち検出対象に対応した候補壁面を抽出する。照合手段28は候補画像領域と、画像の撮影位置から見た候補壁面の投影像とを照合し、照合結果に基づいて検出対象を検出する。
(もっと読む)
診断支援装置およびその制御方法、診断支援システム、プログラム
【課題】符号化されたデータから診断に有効な領域を優先的に読み出すことを可能とし、必要な画像を迅速に取得可能とする。
【解決手段】初期ストリーム設定部18及び入力制御部14の制御により、画像入力部11は、符号化画像データストリームのうち、まず、診断支援処理を可能とする低画質画像を再生可能な分を取り込む。懲り込まれたデータストリームは、復号化部12で復号化され、得られた2次元画像13が診断支援部16で解析されて陽性領域17が決定される。そして、入力制御部14が陽性領域17の部分を優先して取り込むべく画像入力部11を制御することにより、診断に有効な領域が優先的に取り込まれ、詳細に再生される。
(もっと読む)
導電シートの製造方法、この方法を用いて製造された導電シート、タッチパネル及び表示装置、並びにプログラム
【課題】パターンに起因するノイズ粒状感を低減可能であり、観察対象物の視認性を大幅に向上可能な導電シートの製造方法、この方法を用いて製造された導電シート、タッチパネル及び表示装置、並びにプログラムを提供する。
【解決手段】平面領域100の中から選択された複数の位置(シード点SD)に基づいてメッシュパターン20の模様を表す画像データImgを作成する。画像データImgに基づいて、メッシュパターン20のノイズ特性について定量化した評価値EVPを算出する。評価値EVPと所定の評価条件とに基づいて決定された出力用画像データImgOutから、透明基体12の一主面側での模様を表す第1画像データを切り出すとともに、透明基体12の他主面側での模様を表す第2画像データを切り出す。
(もっと読む)
ホールスライドイメージ作成装置
【課題】病理診断の速度や精度を高めることができるホールスライドイメージ作成装置を提供する。
【解決手段】病理標本を基本倍率で撮影する撮影手段16と、前記撮影手段により基本倍率で撮影された病理標本の画像データに基づいて前記病理標本に関する関心領域を特定する関心領域特定手段4と、前記関心領域特定手段により特定された前記関心領域の詳細撮影を行なう詳細撮影手段16と、前記病理標本の識別情報に対応させて、前記撮影手段により撮影された病理標本の画像データ及び前記詳細撮影手段により撮影された前記関心領域の詳細画像データを記憶する記憶手段26とを備える。
(もっと読む)
車両周辺監視装置
【課題】ピッチ検出器を用いることなく、単眼カメラによる構成においてもピッチング補正を行うことができる機能を備えた車両周辺監視装置を提供する。
【解決手段】車両周辺監視装置は、所定の制御周期毎に、車両に搭載されたカメラによる撮像画像を取得し、今回の制御周期での撮像画像の前回の制御周期からの変位量を算出し、該変位量を用いて車両の挙動に起因する撮像画像の変位分を相殺するためのピッチング補正値を算出し、今回の撮像画像に対して、ピッチング補正値による補正を行った補正画像を生成し、補正画像から対象物を検出する。変位量は、撮像画像から、地平線より上側の所定領域、地平線を含み地平線より下側から上側までの所定領域、又は自車両から所定距離内の先行車両を含む所定領域を監視領域として切出し、今回の制御周期における撮像画像の監視領域と前回の制御周期における撮像画像の監視領域間で求める。
(もっと読む)
道路状況把握装置
【課題】非監視対象車線を走行する車両の誤判定を防止し、監視対象車線に対する道路状況を正確に判定することが可能となる道路状況把握装置を提供することである。
【解決手段】実施形態に係る道路状況把握装置は、車両が走行する複数の車線からなる道路上の画像を撮像手段により撮像し、この撮像された画像に基づき前記道路の状況を判定する道路状況把握装置において、前記撮像された画像から移動ベクトル画像を作成し、この作成された移動ベクトル画像の方向性とあらかじめ与えられる車両の進行方向情報とから非監視対象車線を走行する車両を検出し、この検出された非監視対象車線を走行する車両の画像を前記撮像された画像から除外することを特徴としている。
(もっと読む)
画像表示装置
【課題】診断用画像データと過去に収集された参照用画像データを比較表示する際、好適な参照用画像データを短時間かつ正確に検索することが可能な画像表示装置を提供する。
【解決手段】画像表示装置は、画像データにおける任意の領域を関心領域として設定する関心領域設定手段と、第1のラベル情報を前記関心領域に対して関連付けて入力することが可能となるように構成された第1のラベル情報入力手段と、前記関心領域の関心領域データと前記画像データを対応させて参照用画像データとして保存するデータ記憶手段と、前記第1のラベル情報に関連した第2のラベル情報を入力するための第2のラベル情報入力手段と、前記第2のラベル情報に対応する前記参照用画像データを抽出する参照用画像データ抽出手段と、前記抽出された前記参照用画像データを表示するための表示手段とを備えた。
(もっと読む)
基板検査用マスタデータ作成方法
【課題】適合度の高いマスタデータを簡単に作成することができる基板検査用マスタデータ作成方法を提供することを課題とする。
【解決手段】基板検査用マスタデータ作成方法は、部品Pa1〜Pa8を実装した基板Bを検査する際に用いられ、複数の部品Pa1〜Pa8に対して共用されるマスタデータL1〜L4を作成するデータ作成工程と、基板Bを検査して、作成したマスタデータL1〜L4の妥当性を検証する検証工程と、を有する。
(もっと読む)
画像処理装置及び画像処理方法
【課題】人物の顔が存在するシーンでも、自然な不要物体除去を実現する。
【解決手段】補正処理部は、入力画像300内の不要領域(302)を補正用領域の画像信号を用いて補正することにより、不要領域内の物体(不要物体)を除去する。補正用領域設定部は、入力画像300における顔領域及び不要領域の位置に基づき補正用領域を設定する。不要領域が顔領域の外側に位置している場合、顔領域以外の画像領域中に補正用領域を設定し、不要領域が顔領域の内側に位置している場合、顔領域中に補正用領域を設定する。
(もっと読む)
画像処理装置、撮像装置、画像処理プログラム、および、記録媒体
【課題】画像処理における設定値をユーザの好みに合わせて変更することができる画像処理装置を提供する。
【解決手段】画像処理装置が、画像データが予め記憶されている画像データ記憶部から読み出した画像データから特徴量を抽出し、当該抽出した特徴量に基づいて、画像の特徴を示す特徴量に対しての設定値を生成する第1の設定値生成部と、対象画像データに対して、第1の設定値生成部により生成された設定値に基づいて画像処理する画像処理部と、を備えている。
(もっと読む)
画像処理装置、画像処理方法、画像処理システム
【課題】撮像画像の付加価値の向上
【解決手段】ユーザーの頭部に装着され、ユーザーの視界方向を被写体方向として画像撮像を行う撮像手段と、撮像手段での撮像により撮像画像データを取得する撮像画像取得手段と、挿入画像データを記憶する挿入画像記憶手段と、撮像画像取得手段により取得した撮像画像データにおける被写体画像の画像解析処理を行って、該被写体画像内で、入換領域を設定する入換領域設定手段と、入換領域内の全部又は一部の画素データを、挿入画像記憶手段から読み出した挿入画像データに置き換える処理を行って入換画像データを生成する入換画像生成手段と、入換画像生成手段で生成された上記入換画像データについて出力処理を行う画像出力手段と、ユーザーの頭部に装着され、画像出力手段の出力処理で出力された上記入換画像データについて表示出力を行う表示手段と、を備える。
(もっと読む)
動画提示装置
【課題】歪曲広角画像上で任意の追跡対象物を自動追跡する。
【解決手段】魚眼撮影した歪曲広角画像Sを、メモリ130内にフレーム単位で入力する。変換部150は、格納部170内の切出条件に基づき、歪曲画像Sの点Pの位置から、φで示される向きに、サイズmの画像を切り出し、正則画像Tに変換してメモリ140に格納する。追跡開始点Qを含む追跡開始指示が与えられると、フラグ設定部220はフラグをONにし、点Qが新たな点Pになるよう更新する。基準色抽出部200は、新たな点Pの近傍色を基準色αとして抽出し、基準色格納部190に格納する。近隣ブロック抽出部160は、点Pの近傍ブロックを抽出し、ブロック選択部180は、基準色αに近似する画素数が最大となるブロックを選択する。自動変更部210は、選択ブロック内の基準色αに最も適合する色をもつ候補領域の中心点を新たな点Pとする更新を行う。
(もっと読む)
撮像装置及びこれを備えた物体検出装置、並びに、光学フィルタ及びその製造方法
【課題】受光素子1画素程度の微小領域ごとに領域分割された偏光フィルタ層や分光フィルタ層を積層した構造を実現することを課題とする。
【解決手段】画像センサ206の前段に配置される光学フィルタは、特定方向の偏光成分Pのみを選択して透過させる鉛直偏光領域と該特定方向とは異なる方向の偏光成分Sのみを選択して透過させる水平偏光領域とが撮像画素単位で領域分割された偏光フィルタ層222と、赤色波長帯の光のみを選択して透過させる赤色分光領域と波長選択を行わずに光を透過させる非分光領域とが撮像画素単位で領域分割された分光フィルタ層223とを、光透過方向に積層した構成を有し、積層方向下側に位置する偏光フィルタ層の積層方向上面の凹凸を充填材224で充填して平坦化した後に分光フィルタ層を形成したものである。
(もっと読む)
画像表示装置
【課題】被写体の変化に応じて、エリアデータを取得する画素領域を変更すること。
【解決手段】カメラ100は、撮像素子からの出力データに基づいて、画像内における被写体を特定する被写体特定手段と、撮像素子の全画素領域のうち、被写体特定手段によって特定された被写体を含む一部の画素領域から出力されるデータをエリアデータとして取得するエリアデータ取得手段と、エリアデータ取得手段によって取得されたエリアデータの画像を拡大して表示する表示制御手段と、フレーム間での被写体の変化に応じて、エリアデータを取得する一部の画素領域の設定位置を変更する変更手段とを備えることを特徴とする。
(もっと読む)
検出装置及び検出方法
【課題】検出対象物の検出精度を向上させること。
【解決手段】センサーの出力に対応する階調値を含む検出対象画像を生成する画像生成部と、前記検出対象画像から検出対象物を検出することに用いる学習済みの識別器を有する検出部と、を含み、前記識別器は、前記検出対象画像における任意の2つの領域の階調値に基づいて前記検出対象画像における前記検出対象物の検出を行う複数のサブ識別器を有し、前記検出部は、前記複数のサブ識別器に対して、前記検出対象物の複数の領域のうち対応する2つの領域の階調値を入力し、前記複数のサブ識別器の出力に基づいて前記検出対象画像における検出対象物の検出を行う、検出装置。
(もっと読む)
情報表示装置及び情報表示方法
【課題】特定の運転者のみに情報を伝達すること。
【解決手段】第1領域において所定周波数の逆数の時間間隔で点滅し、第1領域を包含する第2領域のうち第1領域以外の領域において所定周波数の2の階乗倍である周波数の逆数の時間間隔で点滅する複数の発光素子を有する情報表示板100を含む画像を取得し、第1領域に示される情報を表示する情報表示装置200であって、撮像間隔設定部201は車両情報が所定条件を満たす場合は撮像間隔を所定周波数の2倍の逆数に設定し、所定条件を満たさない場合は撮像間隔を所定周波数の逆数に設定し、撮像制御部202は設定された撮像間隔に基づいて撮像タイミングが制御された車載カメラ300から情報表示板100を含む画像を取得し、差分画像生成部206は第1画像と、第1画像に対して撮像間隔だけ前に撮像された第2画像との間の情報表示板100の差分画像を生成し、表示部207は差分画像を表示する。
(もっと読む)
車両用画像生成装置及び車両用画像生成方法
【課題】車両周囲画像に含まれる他車両の任意視点から見た画像を、より正確に生成する装置を提供する。
【解決手段】車両用画像生成装置を、3次元構造を有する車両周囲画像に含まれる他車両の可視画像部分の画像情報に基づき、他車両の死角部位の形状や色などの情報を推測する死角情報推測部25と、死角情報推測部25で推測された死角情報に基づき、可視画像部分データから死角部位を補完するための補完画像データを生成し、生成した補完画像データを用いて他車両の死角部位の画像を補完する画像補完部26と、仮想視点設定部27から入力される仮想視点情報に基づき、補完後の車両周囲画像を仮想視点情報の示す視点から見た画像に再構成する画像再構成部28と、を含む構成とした。
(もっと読む)
41 - 60 / 1,911
[ Back to top ]