
Fターム[5B057CF01]の内容
Fターム[5B057CF01]に分類される特許
201 - 218 / 218
ワンタッチ画像変換手段
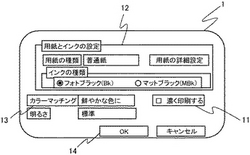
【課題】 本発明は、白地に黄色い文字や細線を引いた画像の視認性を簡便な方法で飛躍的に向上させることをその目的としている。
【解決手段】 オン状態とオフ状態の2つの設定状態しか持たないユーザインタフェースと、設定状態に応じて、画像の色情報をあらかじめ決められた数値分だけ彩度を落とすように作用するか、あるいは線分情報をあらかじめ決められた数値分だけポイント数を上げて太らせるように作用する画像変換手段とから成り立っており、結果として、ユーザに煩雑な画像処理パラメータを操作させることなく、簡単に画像の視認性を向上させるようにする。
(もっと読む)
描画装置、情報処理装置、制御方法、及びプログラム

【課題】 小さな画面に表示しながらペイントの描き味に違和感を覚えないペイントツールを提供することを可能とした描画装置、情報処理装置を提供する。
【解決手段】 PDAは、表示装置101、拡大率決定部301、ペン幅決定部302、ペン幅選択部303を備える。ユーザがペイントツールアプリケーションを画像ファイル付きで起動すると、拡大率決定部301は、表示装置101の画面の表示サイズと画像の大きさを基に、表示装置101に表示する画像の拡大縮小率を決定する。次に、ペン幅決定部302は、拡大縮小率を基に、ユーザに選択させるためのペン幅の候補を決定する。次に、ペン幅選択部303は、ユーザによるユーザインタフェースを介したペン幅の選択を基に、ペンの太さを決定する。
(もっと読む)
画像送受信システム、画像送受信方法、並びに画像送信手順と画像受信表示手順を実行させるためのプログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】送受信するデータ容量を削減しつつ、材質等の再現が可能な高品質の画像データの送受信を可能にする。
【解決手段】画像送信装置10は、画像データを図形データに変換する画像変換プログラム1、部品画像を蓄積するハードディスク2、蓄積された部品画像に基づいて図形データに対して表示属性を設定する属性設定プログラム3、図形データと当該図形データに設定された表示属性とを送信するデータ送受信デバイス4を備えると共に、画像受信表示装置11は、図形データと当該図形データに設定された表示属性を受信するデータ受信デバイス5、部品画像を蓄積するハードディスク6、図形データと当該図形データに設定された表示属性に基づき蓄積された部品画像を加工して画像データを復元する画像復元プログラム7、復元された画像データを表示する画像表示プログラム8を備えた。
(もっと読む)
超音波診断システム及び方法
【課題】超音波映像から対象体の境界を自動で、且つ正確に検出することができる超音波診断システム及び方法を提供する。
【解決手段】超音波映像でエッジを検出してエッジ抽出境界候補モデルを形成し、エッジ抽出境界候補モデルに単純化演算を行って単純化境界候補モデルを形成し、単純化境界候補モデルに細線化演算を行って細線化境界候補モデルを形成し、エッジ抽出境界候補モデル、単純化境界候補モデル及び細線化境界候補モデルを用いて超音波映像から対象体の境界を検出する超音波診断システム及び方法を提供する。本発明によれば、超音波映像から対象体の境界を自動で検出することによって使用者の労力と時間を減少させることができ、使用者間で測定結果が相違することを防止できる。
(もっと読む)
食道粘膜用画像処理装置
【課題】 バレット食道の診断等を効率良く行うのに適した食道粘膜用画像処理装置を提供する。
【解決手段】 食道内の粘膜を撮像した内視鏡画像から食道の管腔方向となるZ方向と周方向となるθ方向の座標系に変換した展開図を生成し、さらに食道の本来の粘膜となる扁平上皮とこの扁平上皮が胃側粘膜に変性した円柱上皮との境界の上皮境界を検出し、さらにバレット食道の症例に多く見受けられる上皮境界が複雑な形状になっている場合の特徴を備えているかを上皮境界のZ方向の分散値σAを算出して基準値σthと比較することによりバレット食道か否かを判定する。
(もっと読む)
画像処理装置、及び、画像処理方法
【課題】 画像データの輪郭成分のみを抽出する高品質な画像処理をする。
【解決手段】 減算回路13により、近傍画素値から注目画素値が減算され、差分値として出力される。注目画素値と近傍画素値とが入力された選択回路16により、差分値が閾値以上である場合、近傍画素値が選択近傍画素値として出力される。また、選択回路16により、差分値が閾値より小さい場合、近傍画素値が注目画素値に置き換えられて選択近傍画素値として出力される。乗算加算回路18により、選択近傍画素値、及び、注目画素値から構成される画素値群と、係数群とが乗算され、全ての乗算結果が加算され、出力注目画素値として出力される。
(もっと読む)
物体検出装置、および方法
【課題】 自車両前方を撮像した画像内に存在する道路上の境界線を簡易に検出すること。
【解決手段】 制御装置103は、カメラ101で撮像した自車両前方の画像を画像処理して、各画素の画像の速度情報を算出し、算出した各画素の画像の速度情報に基づいて、速度情報を有する画素を抽出し、抽出した画素によって構成される斜線を検出し、検出した斜線に基づいて道路上の境界線を検出する。
(もっと読む)
画像にモルフォロジカル演算を適用するための方法及び画像にモルフォロジカル演算を実施するためのシステム
【課題】画像へのモルフォロジカル演算を適用するための効率的な方法を提供することである。
【解決手段】上記課題は、反復的にモルフォロジカル演算を画像の焦点ピクセル及び画像の別のピクセルに適用し、この別のピクセルは焦点ピクセルに関してオフセットにあり、このオフセットは演算カウントに基づくことによって解決される。
(もっと読む)
講義コンテンツ自動作成システム
【課題】 通常教室における板書による講義を特別なハードウェアを用意することなく、高圧縮なコンテンツを自動生成できる講義コンテンツ自動作成システムの提供。
【解決手段】 本発明によれば、講師120が黒板110を用いて行なう講義をカメラ130で撮影してサーバ140に取り込み、画像処理により講師映像を分離して保存するとともに、板書がなされた領域を抽出して、板書文字を時系列的にベクトルデータ化して保存する。ネットワーク150を通じて端末160に配信するWebコンテンツの生成においては、例えばブラウザに講師映像と仮想黒板を表示し、講師映像の再生と同期して、仮想黒板上にベクトルデータを用いて板書を時系列的に提示する。
(もっと読む)
画像処理装置およびその方法
【課題】 文書画像におけるラインアートを部品ごとにアウトラインベクトル化することは困難であった。
【解決手段】 文書画像データから抽出され、2値化および細線化されたラインアート部分について、輪郭線抽出部15で輪郭線ループを抽出する。そして該輪郭線ループが内側輪郭であるか外側輪郭であるかを判定し、不要輪郭線消去部18において、最大外接矩形内にある外側輪郭についての輪郭線ループを削除する。そして、残った輪郭線ループについて、輪郭線パス記述部19で単独パス命令が記述される。
(もっと読む)
物体検出装置、および方法
【課題】 自車両と衝突する可能性が高い物体を検出するにあたって、誤検出物体を効率的に排除すること。
【解決手段】 撮像画像の横方向の速度を検出し(ステップS2)、「背景と異なる画面領域」の検出を行って、自車両前方に存在する自車両に向かって飛び出してくる物体を含む領域を設定する(ステップS3)。その後、検出した「背景と異なる画面領域」のうち、実際には静止しているにも関わらず、自車両の振動によって横方向の速度が検出されてしまった物体を含む領域を誤検出領域として検出し、当該誤検出領域を削除する(ステップS4)。そして、誤検出領域を削除した結果残った「背景と異なる画面領域」を、自車両前方に存在する移動物体であると判定する(ステップS5)。
(もっと読む)
画像処理装置及びその方法
【課題】 1つの文字に対して、従来より多くの透かし情報の情報を埋め込みつつ、文字の劣化を抑えることが可能な透かし情報埋め込み及び抽出を目的とする。
【解決手段】 画像入力部101で文書画像を入力し、文書解析部102で入力した文書画像の文字の特徴点を抽出し、特徴点に電子透かしを埋め込み部106で埋め込む。ただし、特徴点とは、少なくとも、前記文字の交差点、T字点、角、端点の何れかである。
(もっと読む)
フィルムの検査装置
【課題】 フィルム中に分散する粒子の種々の分散特性を正確に検査することができるフィルムの検査装置を提供する
【解決手段】 粒子が分散された光透過性フィルムの一面側に配される光源(照明200)と、このフィルムの他面側に配されて前記フィルムの透過画像を取得する受像手段(カメラ100)を有する。また、受像手段で得た原画像から微細粒子を顕在化させて微細粒子顕在画像を作成する微細粒子顕在化手段350と、原画像から粗大粒子を顕在化させて粗大粒子顕在画像を作成する粗大粒子顕在化手段360とを有する。そして、微細粒子顕在画像と粗大粒子顕在画像から検査画像を作成する検査画像作成手段370と、検査画像中の粒子の特性を演算する特性演算手段380とを有する。
(もっと読む)
シャープネス強調
二次元強調関数(HEF;VEF)は、同じ第1の空間方向に動作する第1のエッジディテクタ(HHP;VHP)及び第2のエッジディテクタ(HBP;VBP)の両方の出力信号に基づいて入力信号(L(m,n))のためのピーキング係数(CX;CY)を決定する。このような態様で、第1の空間方向で入力信号(L(m,n))中で発生しうる全種類の境界が区別される。二次元強調関数(HEF;VEF)は、出力信号(ZX,DX;ZY,DY)の異なった組合せに、ピーキングの量を決定する値を割り当てる。異なった種類の境界に対して異なる二次元強調関数(HEF;VEF)によって割り当てられる値を選択してそれぞれの種類の境界に最も良くフィットするピーキングの所望の量を得ることができる。  (もっと読む)
(もっと読む)
ビデオイメージシーケンスのエンコーディング前のプリプロセシングデバイス及び方法
本発明は、ビデオイメージシーケンス(Ei)のエンコーディング前のプリプロセシングデバイス及び方法に関する。
本発明によればデバイスは、ビデオイメージシーケンス(Ei)に対して複数のモルフォロジー処理ステップを実行する手段(3,5,7,9)と、各モルフォロジー処理ステップの後、モルフォロジー処理の結果に対して重み付けを実行するための手段(4,6,8,10)を有する。 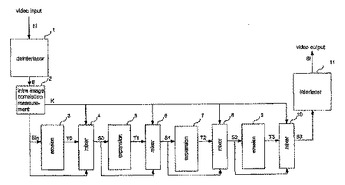 (もっと読む)
(もっと読む)
三次元変形メッシュモデルを用いてオブジェクトの三次元ツリー状管状表面を自動セグメント化するための画像処理システム
三次元画像においてツリー状管状構造の全自動セグメント化のための演算手段を有する画像データ処理システムであって、ツリー状管状構造のツリー状中心経路を演算する手段(20)と、ツリー状管状構造のツリー状中心経路をポイントを形成したセグメントに分割する手段(21)と、ツリー状中心経路の個々のセグメントのために、セルを構成する一般円筒形メッシュを生成する手段(40)と、2つの一般円筒形メッシュを一体化する手段(50)と、を有する画像データ処理システム。 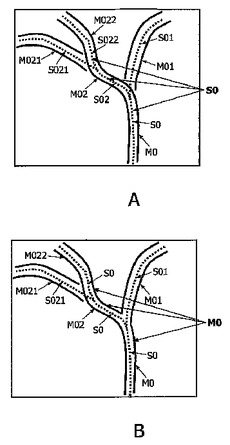 (もっと読む)
(もっと読む)
手術中の2次元画像および手術前の3次元画像をアフィン重ね合わせするための方法およびシステム
手術中のターゲットフィーチャの2次元(2D)医学画像を手術前のターゲットフィーチャの3次元(3D)医学画像と重ね合わせるためのシステムおよび方法が開示される。ターゲットフィーチャの3D画像は第1スケルトングラフに変換される。ターゲットフィーチャの2D画像は第2スケルトングラフに変換される。第1スケルトングラフと第2スケルトングラフのグラフマッチングがグラフの荒いアライメントを得るために実行され、第1スケルトングラフト第2スケルトングラフが重ね合わされる。 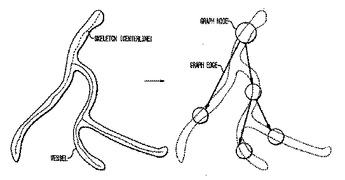 (もっと読む)
(もっと読む)
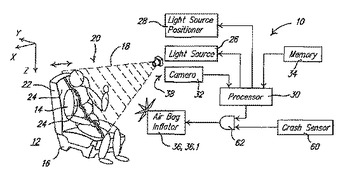
乗員検出システム
カメラ(32)は、光源ポジショナ(28)により配置された光カーテン(18)により物体上に投射された光ストライプ(22)の連続画像を取り込む。これから背景画像を差し引き(616)、得られた画像をビニング(618)により強調し、閾値アルゴリズム(620)により2値化し、細線化し(622)、補間し(624)、そして格納する(626)。補間画像は、複数の光ストライプ(22)について取り込む。プロセッサ(30)は、非ゼロカメラピクセルについて計算した直交座標から3D表面モデルを生成する(1604)。容量表示は、近接表面、例えば着座表面(24)のモデルに対する、物体表面のオフセットから決定する(1610)。物体は、例えば訓練可能パターン認識システムによって、3D表面モデルの3D形状デスクリプタ(1606)および容量表示(1610)またはその一部(1612)に応答して分類される(1614)。車両(12)内の乗員(14)の検出は、安全拘束システム(36)の制御に用いることができる。
 (もっと読む)
(もっと読む)
201 - 218 / 218
[ Back to top ]