
Fターム[5B057CF01]の内容
Fターム[5B057CF01]に分類される特許
41 - 60 / 218
画像処理装置および画像処理プログラム
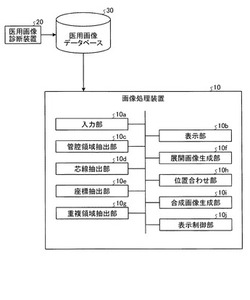
【課題】分岐を有する臓器の展開画像を容易に観察可能とすること。
【解決手段】管腔領域抽出部10cは、管腔領域を抽出し、芯線抽出部10dは、管腔領域の芯線を抽出する。座標抽出部10eは、分岐点を介した複数の芯線上における各点から放射状に伸ばした線分と管腔領域の辺縁部との交点の座標群を抽出する。展開画像生成部10fは、座標群を用いて展開画像を芯線ごとに生成する。重複領域抽出部10gは、芯線ごとの座標群の間で、所定の範囲内にある座標が占める領域を重複領域として抽出する。位置合わせ部10hは、重複領域の座標を用いて、複数の展開画像の位置合わせを行なう。合成画像生成部10iは、位置合わせされた複数の展開画像から、重複領域の座標に対応する画像領域のいずれか一つのみが前面となるように合成画像を生成する。表示制御部10jは、合成画像を表示部10bにて表示させる。
(もっと読む)
目の追跡及び運転者の覚醒度を識別する費用対効果が高くロバストなシステム及び方法

車両上に設置される近赤外線(IR)カメラによって撮像した画像を用いて、事故を回避するために運転者の目の覚醒状態を特定し追跡するための、費用対効果が高く、ロバストな方法であって、その方法は、プロセッサが実行する以下のステップを備える。すなわち、撮像画像においてリアルタイムに顔の追跡を行い、その顔バウンディングボックス内で目バウンディングボックスの位置を、セグメンテーション処理を用いて濃淡値と閾値を比較することによって特定するステップと、1つの場所から別の場所まで、目の重心、対象のモデルヒストグラム及び対象候補のモデルヒストグラムを計算することによって目の追跡を行い、続いてそれらを比較することによって距離を特定し、その後に加重平均によって対象の中心の変位を算出するステップであり、対象のモデルヒストグラム及び対象候補のモデルヒストグラムを、ヒストグラム均等化画像範囲及びモルフォロジ変換画像を含む特徴空間に基づいて計算するステップと、ヒストグラム均等化、モルフォロジ演算及びヒストグラムと濃度共起行列を用いたテクスチャベースのパラメータを用いて目の覚醒状態を検知するステップとを有する。 (もっと読む)
画像処理装置、印刷システム、画像処理方法、およびプログラム
【課題】赤目補正を適切に行うことを可能とする。
【解決手段】赤目領域特定情報生成部43は、少なくとも2つの色の特徴量を軸とする空間における補正処理対象領域の特徴量の分布において、赤目領域を構成する画素の分布とそれ以外の画素の分布を分離する分離曲線を生成し、補正処理対象領域の画素の値と、その値の、分離曲線に対応する値の大きさに基づいて、その画素に対する補正の強度を示す情報をその画素の位置に対応させて格納する補正強度マップ情報を生成する。補正強度マップ調整部61は、補正強度マップ情報に対して膨張処理を施し、膨張処理が施された補正強度マップ情報に対して、オープニング処理またはクロージング処理を施す。
(もっと読む)
画像処理装置、印刷システム、画像処理方法、およびプログラム
【課題】赤目補正を適切に行うことを可能とする。
【解決手段】予備補正部31は、少なくとも2つの色の特徴量を軸とする空間における補正処理対象領域の特徴量の分布において、赤目領域を構成する画素の分布とそれ以外の画素の分布を分離する分離曲線を生成し、補正処理対象領域の画素の値と、その値の、分離曲線に対応する値の大きさに基づいて、その画素に対する補正の強度を示す情報をその画素の位置に対応させて格納する補正強度マップ情報を生成する。補正強度マップ調整部61は、膨張処理が施された補正強度マップに対して施すオープニング処理またはクロージング処理の強度を、補正処理対象領域の全部または一部の画像の色状態に基づいて決定する。
(もっと読む)
画像処理装置、印刷システム、画像処理方法、およびプログラム
【課題】赤目補正を適切に行うことを可能とする。
【解決手段】予備補正部31と指定領域補正部32は、上記補正処理対象領域の中の赤目領域を特定する。補正制御部33は、上記ユーザーの指定の回数に応じて、赤目領域を特定するための条件を変更する。指定領域補正部32は、補正制御部33により設定されたユーザーの指定回数に応じた条件に基づいて、特定される赤目領域に対して赤目を修正する補正を行う。本発明はプリンターに適用できる。
(もっと読む)
サインに基づくマンマシンインタラクション
【課題】人間のサイン及びジェスチャのコンピュータ視覚認識に基づくヒューマンコンピュータインタラクション方法を提供する。
【解決手段】人間の検出、人間のボディパーツ検出、手形状分析、軌道分析、向き決定、ジェスチャマッチング等を含む。形状及びジェスチャの多くの型が、コンピュータビジョンに基づく煩わしくない様式で認識される。多くのアプリケーションが、家電の遠隔制御、コンピュータ制御装置のマウスレス(及びタッチレス)操作、ゲーミング及び他方に命令を与えるための人間−ロボットコミュニケーションを含むこのサイン理解技術により実現可能となる。動的な検出ハードウェアが、ビデオレートでの深度画像のストリームを取得するために用いられ、深度画像のストリームは、情報抽出のために順次分析される。
(もっと読む)
糸条の欠陥検出方法および欠陥検出装置
【課題】多数の連続した単繊維の束からなる糸条の欠陥の有無や種類を、糸条の撚りの有無にかかわらずオンラインで把握できかつ糸条の製造工程により製造される糸条パッケージの品質管理を、迅速に行うことができる欠陥検出方法を提供する。
【解決手段】糸条または背景を照明して糸条と背景に明度差または色相差を生じさせて糸条を撮像し、得られた画像を処理することにより糸条の欠陥を検出する方法であって、(a)撮像した画像を明度差または色相差を基に処理し2値化画像を得る、2値化段階、(b)前記2値化画像に細線化処理を行う細線化段階、(c)前記細線化処理した画像上の細線の分岐点を除去し、糸条対応細線と欠陥候補細線とを分離する分離段階、(d)前記欠陥候補細線の特徴量を記憶手段内に予め設定された欠陥特徴量の閾値と比較し、欠陥の該否および/または欠陥の種類の判定を行う判定段階の4段階により画像の処理及び判定を行う。
(もっと読む)
内視鏡装置
【課題】観察対象物と内視鏡遠位端部との距離を相対的に表示することが可能な内視鏡装置を得る。
【解決手段】スコープコントローラ231は、観察画像を仮想的に複数のメッシュに区分する。そして、メッシュの中心点Oに向けてレーザ光照射部215にレーザ光を照射させる。レーザ光受光部216は中心点Oからの反射光を受光して、反射光の位相を検出する。スコープコントローラ231は、照射したレーザ光と反射光との位相差を用いて、メッシュの中心点Oから遠位端部211までの距離を算出する。システムコントローラ301が、受信した距離に応じて、等距離線を作成し、表示画像に合成する。そして、表示画像を表示部400に表示させる。遠位端部211から最も距離が近い部位を取り囲む等距離線は、最も濃い色で描かれ、遠位端部211から距離が離れるにつれて等距離線を表す色が薄くなる。
(もっと読む)
病理組織画像解析装置、病理組織画像解析方法、病理組織画像解析プログラム
【課題】病理組織画像解析による病理診断における癌の鑑別精度を向上させること。
【解決手段】生体組織画像における組織領域内に含まれる腺管の特徴を示す腺管特徴情報に基づき前記画像から腺管領域を検出する間質領域・腺管領域検出手段106と、検出された腺管領域内に含まれる細胞核を予め設定された色素基準に基づき抽出する腺管内の細胞核検出手段107と、各腺管における予め設定された基底部領域に対する細胞核の分布状態に基づき前記腺管の異型度を算出する腺管形成評価手段108とを備えた。
(もっと読む)
走行支援装置および走行支援方法
【課題】自車両が走行する走路に、物体が飛び出す可能性を適切に算出することができる走行支援装置を提供する。
【解決手段】車両前方を撮像する撮像手段10と、撮像した画像の情報に基づいて、画像中で移動した物体のエッジ成分を抽出する抽出手段と、画像中の所定領域において、抽出手段により抽出されたエッジ成分に対応する画素が複数連続してなる画素列を構成する各画素のうち、高さ方向において最も下側に位置する画素の位置を最下点位置として検出する最下点位置検出手段と、車両の進行方向に沿って、最下点位置同士を結ぶ直線を、自車両が走行する走路の境界線として検出する境界線検出手段と、を備える走行支援装置において、最下点位置に基づいて、自車両の進行方向の空間と交差する空間である交差空間を検出する交差空間検出手段と、検出された交差空間に基づいて、自車両が走行する走路上に、物体が飛び出す可能性を算出する算出手段と、を有することを特徴とする走行支援装置。
(もっと読む)
画像接合方法、装置及びプログラム
【課題】 2つのオルソ画像をより自然に接合する。
【解決手段】
近似度算出プログラム(12a)が、ハードディスク装置(24)に格納される2つのオルソ画像データ(30)の重複部分の探索範囲で近似度を算出する。近似度2値化プログラム(12b)が、探索範囲内の近似度を最大の閾値で2値化し、ラベリング処理プログラム(12c)がラベル化し、細線化プログラム(12d)が細線化する。無指定探索線探索プログラム(12e)又は入口点指定接合線探索プログラム(12f)が、接合線決定基準線に沿った方向で近いラベルを探索しながら、探索したラベル内に接合線を設定する。ジャンプ区間に対しては、近似値の閾値を下げて、2値化、ラベリング処理および細線化を実行し、接合線決定基準線に沿った方向で近いラベルを探索しながら、探索したラベル内に接合線を設定することを繰り返す。
(もっと読む)
操縦支援装置
【構成】カメラC_1〜C_4の各々は、車両に斜め下向きの姿勢で設けられて、車両の周辺の被写界を捉える。CPU12pは、カメラC_1〜C_4の各々から出力された被写界像を鳥瞰画像に変換し、変換された鳥瞰画像からエッジを抽出する。CPU12pはまた、抽出されたエッジによって描かれる線の角度情報を抽出されたエッジ上の複数の位置に対応して検出し、検出された角度情報のうち検出回数が基準を上回る特定角度情報に対応して警告のような操縦支援処理を実行する。
【効果】操縦支援のための負荷を低減することができる。
(もっと読む)
人流計測システム
【課題】肌色情報に基づいて人間の顔を検出し、複数の顔を追跡する人流計測システムを提供する。
【解決手段】第1時点における第1の顔情報を記録するステップと、カメラで前記第1時点の直後の第2時点に撮った影像に肌色区域の有無を判断するステップと、前記肌色区域が人間の顔であるかどうかを判断し、人間の顔と判断された場合に、正面顔または横顔かを判断して、判断の結果を仮の顔情報として記録するステップと、前記仮の顔情報と前記第1の顔情報との相似性を一対一に比較し、前記相似性が設定条件に達したら、前記第1の顔情報を前記仮の顔情報に更新され、前記相似性が設定条件に達せず、かつ、前記仮の顔情報が人間の顔と判断されると、前記仮の顔情報を、第2の顔情報として記録して前記第1の顔情報が遮蔽されたと判断するステップと、前記記録された顔によって、通過した人数を計測するステップとを含む。
(もっと読む)
画像処理装置、画像処理方法、プログラム及び記録媒体
【課題】文字画像を人間の筆順にて区切られる文字ストロークと同様なストロークに精度良く分解する画像処理装置、画像処理方法、プログラム及び記録媒体を提供する。
【解決手段】画像処理装置は、文字画像を細線化する細線化処理手段と、細線化処理手段により細線化された文字画像から端点及び交点を検出する検出手段と、検出手段により検出された交点がストロークの終了か否かを判定する判定手段と、細線化処理手段と検出手段と判定手段とに基づいて、文字画像から文字のストロークを分解して抽出するストローク抽出手段と、を備える。
(もっと読む)
地図画像処理装置、地図画像処理方法、および、コンピュータプログラム
【課題】3次元地図データの作成を効率良く行う。
【解決手段】地図画像処理装置200は、3次元座標空間で表された3次元地図データを記憶する記憶部D13と、3次元地図データを所定の透視投影条件で透視投影して、2次元画像500に変換する座標変換部と、現実世界を撮影した撮影画像Fnを取得する撮影画像取得部と、撮影画像に含まれる路面標識実写画像と、2次元画像に含まれる路面標識投影画像とが一致するように、透視投影条件を修正する透視投影条件修正部と、撮影画像Fnに含まれるビルBLなどの地物の画像を、修正された透視投影条件で透視投影された2次元画像に含まれる地物に対応付けることにより、撮影画像に含まれる地物の画像を3次元地図データにテクスチャマッピングするテクスチャ適用部と、を備える。
(もっと読む)
速度規制標識認識結果の通知方法
【課題】速度規制標識32の認識正解率が100%に達しないシステムにおいても、運転者に適切な制限速度情報の提供が行える速度規制標識認識結果の通知方法を提供する。
【解決手段】撮像部1で車両前方画像30を撮像し、この車両前方画像30内の速度規制標識32を画像処理部2で自動認識し、この自動認識過程の前記車両前方画像30内の速度規制標識32部分の画像を第1画像5として表示すると共に、前記自動認識した結果から導かれたイメージ画像からなる第2画像6を並べて表示する。これにより、運転者が上記ペア画像5、及び6を比較でき、速度規制標識32の内容に関して、正しい判断を行うことが出来る。
(もっと読む)
画像変化抽出装置
【課題】地表面に生じた物理的な変化をより高精度に抽出し、変化の空間的連続性を正しく表示する画像変化抽出装置を提供する。
【解決手段】コヒーレンスマップを対象に、ノイズ除去を行うノイズ除去部2と、ノイズ除去後の画像から特徴量抽出を行う特徴量抽出部6と、コヒーレンスマップを構成する画素のコヒーレンスの時間的、空間的平均値を算出するコヒーレンス平均算出部3と、コヒーレンスマップの時系列変化情報を用いて、変化抽出を行う変化抽出部4と、変化の発生時刻のずれを検出し、時刻調整を行う変化時刻調整部5と、変化選別を行い変化選別後の変化選別画像データを全体の出力とする変化選別部7とを備える。
(もっと読む)
車線認識装置および車線認識方法
【課題】道路鋲を精度よく検出する。
【解決手段】候補画像生成部11は、生成されたエッジ画像において、候補領域となる白色領域に対してこの領域を全方位に膨張させる膨張処理を行い、膨張画像を生成する。道路鋲検出部12は、生成された膨張画像において、白色領域に関するアスペクト比および面積に基づいて、道路鋲を検出する。車線認識部14は、検出された道路鋲に基づいて、道路上の車線を認識する。
(もっと読む)
白線検出装置
【課題】演算量を低減させることができ、かつ、誤検出を防止することができる白線検出装置を提供する。
【解決手段】カメラ1による撮像画像を俯瞰処理部2が俯瞰画像に変換し、俯瞰画像は区分線により複数の区画に区分されて表示部3に表示される。そして、複数の区画のうち一部の区画を選択する操作が選択操作部13に入力されると、切出し部14が、画像処理部4において画像処理が行われた後の画像全体から、選択された区画に対応した画像部分を切り出す。さらに、白線認識部9が、この画像部分について白線認識を行ない、テンプレート作成部10が認識された白線に基づいてテンプレートを作成し、テンプレートマッチング部11が画像全体についてテンプレートに表された白線に対して平行な白線の検出を行ない、検出白線出力部7により検出され白線が表示部3に表示される。
(もっと読む)
画像処理方法、画像処理装置及びコンピュータプログラム
【課題】画像を細線化した時に生じる画像の特徴を表していないヒゲや芯線の歪みを修正する。
【解決手段】入力画像に対して細線化処理を行うことにより芯線を抽出する細線化処理手段と、前記細線化処理手段で求めた芯線の画素に対して、元の線幅を推定する線幅推定手段と、前記細線化処理手段で求めた芯線を交点で分割する芯線分割手段と、前記線幅推定手段で求めた線幅情報を元に、前記芯線分割手段で分割した芯線が等幅線であるか否かを判定する等幅線判定手段と、前記芯線分割手段で分割した芯線に対して、他の芯線との接続関係情報を生成する接続関係情報生成手段と、前記線幅推定手段で求めた芯線画素の線幅情報と前記等幅線判定手段で等幅線を判定した結果と前記接続関係情報生成手段で求めた接続関係情報とに基づいて、前記芯線分割手段で分割した芯線の修正を行う芯線修正手段とを具備する。
(もっと読む)
41 - 60 / 218
[ Back to top ]