
Fターム[5B057CF01]の内容
Fターム[5B057CF01]に分類される特許
61 - 80 / 218
画像処理装置及び画像処理方法、並びに当該画像処理方法を用いたプログラム
【課題】並列演算プロセッサに適した手法で、大きな欠損の形状補正処理を繰り返し複数回実行することができる。
【解決手段】処理対象の欠損を含む図形画像に対して膨張フィルタ及び収縮フィルタを含む画像処理フィルタを用いて上記欠損を埋めるように当該図形画像の形状を補正する形状補正処理を行う画像処理装置において、上記画像処理フィルタを回転し、もしくは上記図形画像を回転して上記形状補正処理を繰り返し複数回実行する。ここで、互いに異なる形状を有する複数の画像処理フィルタを用いる。また、1×複数画素の棒形状を有する画像処理フィルタを用いて、SIMD(Single Instruction Multi Data)単位で上記形状補正処理を行う。
(もっと読む)
回路パターン検査装置および検査方法およびテストパターン

【課題】回路パターンの欠陥検査方法では、基準となるパターンの画像データを膨張・収縮といった操作を行い、許容できる最大の寸法と最小の寸法を有するマスタパターンを作製し、被検査物から得た画像データをこのマスタパターンと比較することで欠陥を発見する。このマスタパターンを作製する膨張・収縮という画像処理においては、画素毎にその周囲の画素を加減する処理が行われるが、様々な線幅が含まれる基準パターンの場合は線幅の比率によって一定の割合で膨張・収縮することが困難であった。
【解決手段】基準パターンに属する画素に背景からの距離データを付与し、周辺の画素に自分より大きな距離データがなくなるまで画素を削除し、基準パターンの骨格を代表する骨格パターンを作製する。この骨格パターンに属する画素が有する距離データに所定倍率をかけた範囲にある画素をマスタパターンとする。
(もっと読む)
車両運転支援装置および車両運転支援方法
【課題】自車両の前端部に対する左右の側方の領域の状況を簡便かつ適切に確認することができる「車両運転支援装置および車両運転支援方法」を提供することを目的とするものである。
【解決手段】車載カメラ11の撮影映像3に含まれる物体に対する車両の姿勢を検出する姿勢検出装置17と、この姿勢検出装置17の検出結果に基づいて、車両の姿勢にかかわらずに状況確認に必要とみなされる領域を含み、物体の角度が表示状態において互いに左右対称となるような第1の画像1および第2の画像2を生成する画像生成装置18と、この画像生成装置18によって生成された画像1,2を合成して表示部14に表示する画像合成装置20とを備えたこと。
(もっと読む)
車両走行路の特徴情報の生成方法および生成装置、ならびに生成処理用のプログラム
【課題】車両走行路を表す3次元情報を処理することによって、車両走行路の具体的な特徴を精度良く表した情報を生成する。
【解決手段】鉄道用軌道を含む所定広さのエリアを対象として生成されたオルソ画像をベクトル化エンジン2において処理することにより、軌道の位置および方向ならびに勾配の変化を表す3次元ベクトルを連ねた3次元ベクトル鎖11を生成する。軌道プロファイル生成エンジン3は、この3次元ベクトル鎖11の提供を受けて、各ベクトルにつき、そのベクトルが左右いずれのカーブに対応するかを特定し、さらにカーブ半径を求める処理や、カーブ半径から直線/曲線の属性を特定する処理などを実行する。さらに特定されたカーブの向きや属性に基づき、3次元ベクトル鎖11を複数の区間に分割し、各区間における軌道の特徴を表す情報を集合させた軌道プロファイル13を生成する。
(もっと読む)
3次元モデルの作成方法および物体認識装置
【課題】実物モデルとカメラとの位置関係を任意に変更して3次元計測を行い、各計測により復元された3次元情報を位置合わせして統合する方法でも、精度の良い3次元モデルを作成できるようにする。
【解決手段】3次元認識の対象とするワークの実物モデルWMの所定箇所に、向きを一意に特定できる形状の多角形のマークMを取り付ける。そして、このマークMが各カメラ11,12,13の視野に含まれる状態が維持されるように実物モデルWMの姿勢を変更して3次元計測を行う処理を、複数回実行する。さらに、毎回の計測により復元された3次元情報のうちの2以上の所定数を選択し、これらを位置合わせして統合した後、統合された3次元情報からマークMに対応する情報を削除または無効化し、その処理後の3次元情報を3次元モデルに設定する。
(もっと読む)
画像処理装置および画像処理システム
【課題】画像処理を止めたりあるいは遅らせたりすることなく、画像処理に使用された画像データを出力する。
【解決手段】カメラ3から画像データを得る画像入力インターフェース101と、その画像データを記憶するVRAM153と、CPU160およびメインメモリ161とにより成る画像処理装置に対し、画像入力インターフェース101からの画像データを記憶するVRAM105と、CPU130およびメインメモリ131と、CPU160とCPU130との間に介設され、これらの間でやりとりされる情報の転送を行うデュアルポートメモリ135とを備えた。VRAM105,153は、それぞれ、A/D変換器101とCPU130,160との間に配置される。CPU160は、VRAM153に記憶された画像データを用いて画像処理を実行して外観検査測定を行う一方、CPU130は、VRAM105に記憶された画像データの出力処理を実行する。
(もっと読む)
画像表示方法、画像表示装置及びそれを用いた操作装置
【課題】 撮影等により取得した画像データ上での原指像の状態とは無関係に、個々の指を示す画像を該原指像よりも細くした形で画面上に確実に表示できる画像表示装置を提供する。
【解決手段】 取得した画像データにおける原指像FIの指先部分の位置を画像指先点として特定し、モニタ15の画面領域上にてその画像指先点に対応する位置に、原指像FIよりも相対的に狭幅となる指示体画像SFを、原指像FIの画像データとは別の指示体画像データを用いて表示する。原指像FIはあくまでユーザーによる指示位置特定にのみ用い、画面領域上には、別に用意された指示体画像SFを貼り付け表示する。これにより、画像データ上での原指像FIの状態とは無関係に、個々の指を示す指示体画像SFを該原指像FIよりも細くした形で画面上に確実に表示することができ、ひいては指像が過度に太く表示されることによる違和感の発生を防止することができる。
(もっと読む)
画像のデータ圧縮方法、画像処理におけるパターンモデルの位置決め方法、画像処理装置、画像処理プログラム及びコンピュータで読み取り可能な記録媒体
【課題】十分な特徴量を残しつつ、縮小率を高めて処理の高速化を図る。
【解決手段】予め登録された登録画像に対応するパターンモデルを、サーチ対象画像中からサーチして位置決めを行う画像処理におけるパターンモデルの位置決めにおいて、画像のデータを圧縮するデータ圧縮方法であって、画像を構成する各画素に対して、エッジ強度情報を含むエッジ強度画像及びエッジ角度情報を含むエッジ角度画像を演算する工程と、各画素毎のエッジ角度画像につき、予め規定された一定幅の角度を示すエッジ角度ビットで表現したエッジ角度ビット画像に変換する工程と、エッジ角度ビット画像を圧縮して、エッジ角度ビット毎に和をとったエッジ角度ビット縮小画像を作成する工程とを含む。これにより画像を縮小後もエッジ角度情報が維持されるので、サーチの精度を維持しつつデータ量を縮小したサーチの高速化を実現できる。
(もっと読む)
画像処理方法、画像処理装置および画像処理のためのプログラム
【課題】血管径に近い大きさの動脈瘤等を精度良く検出できる画像処理方法、画像処理装置および画像処理のためのプログラムを提供する。
【解決手段】画像処理装置1は、対象領域の3次元画像に対して細線化処理を施す細線化手段11と、細線化手段11により得られた画像の短枝の部位を特異形状部位として抽出する短枝抽出手段12と、短枝抽出手段12により抽出された短枝の特徴量を求める特徴量算出手段13と、を構成する。対象領域(血管領域)の3次元画像に対して細線化処理を施し、細線化処理により得られた画像の短枝の部位を特異形状部位(嚢状小動脈瘤)として抽出することで、嚢状小動脈瘤を効果的に抽出できる。
(もっと読む)
再構成可能モジュールと、モルフォロジー演算を実行するために同モジュールを実施する方法
本発明は、モルフォロジー演算を画像処理に対し実行できるようにする再構成可能モジュールに関する。モジュールは、5入力(A,B,C,D,E)、3出力(S0,S1,S)、3つの加算器/減算器(add1,add2,add3)および4つの論理ブロック(muxA/B,muxD/E,muxE/S,muxABC)を含む演算ブロックを含む。論理ブロック(muxA/B,muxD/E,muxE/S,muxABC)は、出力(S0,S1,S)が5入力(A,B,C,D,E)に対し実行された基本演算(加算、減算、最小値、最大値)の結果を送出できるように3つの加算器/減算器(add1,add2,add3)間の様々な経路を提供する。本再構成可能モジュールは、部品数の低減と、様々なモルフォロジー演算(そのパラメーターは変更可能である)を実行可能にすること、とにより特徴付けられる。さらに、本再構成可能モジュールは、より複雑なモルフォロジー演算を実行するために直列結合可能である。本発明はまた、原画像を起点として原画像の積分画像、浸蝕画像、拡張画像、距離画像、または行と列に沿った投射を決定できるようにする再構成可能モジュールを実施する方法に関する。 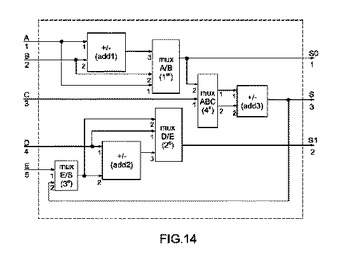 (もっと読む)
(もっと読む)
画像処理装置、およびカメラ
【課題】画像内から人物の顔を検出すること。
【解決手段】制御装置104は、画像内から人物の肌の色の画素で構成される肌色領域を抽出し、肌色領域が楕円形状をしているかを判定するための充足率と、肌色領域の実空間上における大きさである推定実寸の少なくとも一方を、肌色領域が人物の顔に相当する領域であるか否かを判定するための指標として算出する。そして、制御装置104は、算出した指標に基づいて、肌色領域が人物の顔に相当する顔領域であるか否かを判定する。
(もっと読む)
データ作成装置、データ作成方法、データ作成用プログラム、描画装置、描画方法、描画用プログラム、および、コンピュータ読取可能な記録媒体
【課題】図形を表示するためのデータである画像データの生成に際し、図形が表示される環境に適した表示データを生成する。
【解決手段】データ作成装置では、基本的なアンチエリアシング処理によって処理された画像データに対して、図形の基本部分の一例である骨格の近傍部分の階調データが、表示特性情報に基づいて補正される。たとえば、表示装置の表示特性によって文字が太めに見えるような特性の場合や、文字色と背景色の組合せが文字が太く見せてしまうような組合せである場合には、文字を細らせるような補正がなされる。
(もっと読む)
画像比較装置および画像比較プログラム
【課題】画像比較検査を容易且つ正確に実施することのできる画像比較装置および画像比較プログラムを提供する。
【解決手段】画像比較装置10は、基準となる画像と検査対象となる画像とを略同一の解像度で読み取ることにより、第1の画像データと第2の画像データとを生成する画像読取手段11,16と、第1の画像データおよび第2の画像データを画面上であおり表示する画像表示手段11,12と、第1の画像データと第2の画像データとを比較することで両画像データ間での差異を検出し、差異が所定の閾値を超えた場合に当該差異の存在する領域に相違点があると判断してあおり表示されている画像データ上にマーキング表示を行う相違点抽出手段11と、を備えており、画像データ上に表示されるマーキングが、ポインティングデバイス15の操作によって追加・削除自在に構成されている。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム及び記録媒体
【課題】本発明は、太線化、細線化処理の行われる画像のうち特定画像に対しては、該太線化、細線化処理による縦横の変化の発生を防止する画像処理を行う画像処理装置、画像処理方法、画像処理プログラム及び記録媒体に関するに関する。
【解決手段】複合装置1は、1200dpiのオリジナル画像データに600dpiの不正コピーガードパターンを合成するために、不正コピーガードパターン変換機能部32が、不正コピーガードパターンの解像度変換を行う際に、合成後の画像にエッジ処理部51で縦線の太線化または細線化が行われても、不正コピーガードパターンの縦横比率に変化が生じないように、先に前細線化処理または前太線化処理を施し、その後、オリジナル画像データとビデオ出力コントローラ4で合成して、エッジ処理部51でエッジ処理を行う。したがって、不正コピーガードパターンの認識率を向上させることができる。
(もっと読む)
車両周辺監視装置
【課題】対象物が四足動物に該当するか否かの認識精度の向上を図ることができる装置を提供する。
【解決手段】本発明の車両周辺監視装置によれば、抽出対象物、すなわち、撮像画像から抽出された対象物に、上端部から下端部に向かって間隔が広がる一対の第1線分からなる特定部分が2つ存在するか否かに応じてこの対象物が四足動物に該当するか否かが判定される。歩行中の四足動物を横から見た場合、前後それぞれの左右一対の脚部が上端部から下端部に向かって間隔が広がる姿勢となることに鑑みて、各特定部分は歩行中の四足動物の前または後の左右一対の脚部に該当する可能性が高いため、この判定手法により対象物が四足動物に該当するか否かの認識精度の向上を図ることができる。
(もっと読む)
画像処理装置、画像処理プログラム、および画像処理方法
【課題】より小さな規模の回路(より小さな容量のメモリ領域)を用いてがたつき部分を抽出することができる画像処理装置を提供する。
【解決手段】画像処理装置100は、入力された多値画像データを基準閾値データに基づいて2値化することによって基準2値画像データを生成し、多値画像データを基準閾値データと異なる複数の比較閾値データの各々に基づいて2値化することによって複数の比較2値画像データを生成する2値化手段42(42−1,42−2,42−N)と、基準2値画像データと複数の比較2値画像データとを比較することによって、がたつき部分を抽出する抽出手段43と、多値画像データのがたつき部分に対して補正を行う補正手段44とを備える。
(もっと読む)
歩行者検出装置及び歩行者検出方法
【課題】背景を歩行者と誤検出することを防ぐ。
【解決手段】
カメラ10と、撮像された画像から特徴点を抽出する特徴点抽出部21と、抽出された特徴点の移動速度及び/又は移動方向を含む移動情報をそれぞれ算出する移動情報算出部22と、算出された特徴点の移動情報に基づいて、撮像された画像の中から移動する対象立体物を含む対象領域を抽出する判定対象抽出部31と、抽出された対象領域に関する移動情報と対象領域の周囲に設定された比較領域に関する移動情報とを比較し、その移動情報の比較結果に基づいて抽出された対象領域に含まれる対象立体物が歩行者であるか否かを判定する歩行者判定手段34と、を有する。
(もっと読む)
医用画像処理方法および医用画像処理装置
【課題】血管径と同じ程度の大きさの嚢状小動脈瘤を湾曲部の影響を受けずに検出する。
【解決手段】3次元画像データから対象領域内の検出対象を検出する画像処理方法において、累積度数分布から求まるしきい値を用いて処理領域を抽出するステップと、抽出された処理領域から細線化によって対象領域を検出するステップと、対象領域の特徴量を算出するステップと、算出された当該特徴量に基づいて検出対象を検出するステップと、
を備えることを特徴としている。
(もっと読む)
エッジ抽出装置、測量機、およびプログラム
【課題】対象物の輪郭以外のノイズ検出を低減すると共に、その操作性を向上する。
【解決手段】
エッジ抽出装置は、画像からエッジ強度を算出してエッジ検出を行うエッジ検出部と、エッジ検出部が検出したエッジをラベリング処理し、かつ、エッジの長さを求めるラベリング処理部と、ラベリング処理部が求めたエッジの長さとエッジ検出部が算出したエッジ強度とを対応付けた値によってエッジの強調処理を行うエッジ強調処理部と、エッジ強調処理部によって強調された画像に対して、調整可能とされる閾値により2値化処理を施し、エッジを抽出するエッジ抽出部とを備える。
(もっと読む)
医用画像撮影装置、医用画像処理装置および医用画像処理プログラム
【課題】結節が良性であるか悪性であるかを判定するために有用な情報を画像から抽出すること。
【解決手段】肺結節膨張部204が肺結節を膨張し、スケルトン化部205が棒状伸展構造をスケルトン化し、CP特定部206が肺結節の膨張境界DBと棒状伸展構造のスケルトンとの交点CPを特定する。そして、SP特定部207およびEP特定部208がCPを起点として棒状伸展構造のスケルトンを探索することによって棒状伸展構造の開始点SPおよび終了点EPをそれぞれ特定する。
(もっと読む)
61 - 80 / 218
[ Back to top ]