
Fターム[5B057CF05]の内容
Fターム[5B057CF05]に分類される特許
421 - 435 / 435
道路領域決定可能プログラム及び道路領域決定方法
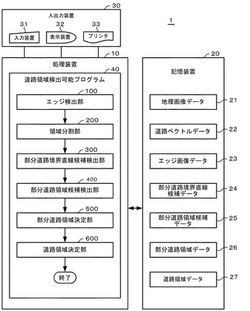
【課題】 地理画像から道路の異なる部分道路領域を簡単に検出可能にする。
【解決手段】地表を撮影して得られる地理画像内のエッジを検出し、地理画像を複数のメッシュに分割し、各メッシュについてそのメッシュを通過するいずれかの道路が存在する場合に、その道路のそのメッシュ内に位置する部分道路に関して、当該部分道路に平行で、かつ、そこからの距離が制限値以下である、複数の直線状のエッジ部分を、当該部分道路の境界直線に関する部分道路境界直線候補として、道路ベクトルデータに基づいて検出し、それらの候補から、その部分道路が当該メッシュ内で占有する領域に関する複数の部分道路領域候補を検出し、それらの部分道路領域候補を評価してその一つを当該メッシュ内の部分道路領域として決定し、異なるメッシュに対して決定された複数の部分道路領域を接続して上記道路ベクトルに対する道路存在領域を決定する。
(もっと読む)
画像処理システム及び画像処理方法

【課題】 電子メールシステムや受信端末に対して負荷になるような大容量ファイルを添付しなくても、確実に宛先に画像情報を伝達することができ、さらに受信側での判断のもとに、必要な画像データを受信側が容易に獲得することができる画像処理システム及び画像処理方法を提供する。
【解決手段】 画像入出力装置10では、画像入力装置201等からイメージ情報を入力し、コントロールユニット200内のHDD208に格納する。そして、イメージ情報に含まれる個々のオブジェクトの属性に応じて、当該イメージ情報から低解像度画像やベクトルデータを生成し、それらの情報とイメージ情報の格納先に関する情報とを指定された送信先に送信する。
(もっと読む)
画像処理システム及び画像処理方法
【課題】 著作権保護等の観点から再利用が禁止されている、若しくはむやみに加工されたくない情報をベクトルデータとして第三者に提供しないようにすることによって、再利用が許可されたベクトルデータを好適に提供することができる画像処理システム及び画像処理方法を提供する。
【解決手段】 画像読み取り部110からイメージ情報を入力してデータ処理装置115がベクトルデータを生成する。ここで、データ処理装置115は、当該ベクトルデータの再利用が許可されているか禁止されているかを判定し、ベクトルデータの再利用が禁止されていると判定された場合に、格納されたベクトルデータを破棄する。
(もっと読む)
画像処理システム及び画像処理方法
【課題】 イメージ情報をベクトルデータに変換したときの変換結果情報をユーザが容易に確認することができる画像処理システム及び画像処理方法を提供する。
【解決手段】 入力装置113から入力されたイメージ情報は、データ処理装置115によってベクトル化され、さらにベクトル化に成功したベクトルデータが画像データに変換される。そして、入力されたイメージ情報と変換された画像データとが合成されて合成画像データが生成されて出力される。
(もっと読む)
画像歪み補正装置、画像読取装置、画像形成装置、プログラム及び記憶媒体
【課題】 スキャン画像内の文字サイズに関係なく画像の主走査方向の歪み補正における精度の高精度化を図る。
【解決手段】 スキャン画像内の文字サイズに合わせて変更される閾値(第1閾値および第2閾値)を用いて抽出された黒画素ランを基に縦成分矩形を抽出し、縦成分矩形間の主走査方向および副走査方向の距離を基に文字行を抽出する。すなわち、文字サイズに合わせて閾値を変更する(例えば、英文画像のように文字が小さい場合にはランとして登録する時の長さの最小値を小さくする)ことで、確実に縦成分矩形を抽出できるようになり縦成分矩形の抽出漏れを防止するとともに、このようにして抽出された縦成分矩形を用いることで隣接する文字の接触を防止する。このような縦成分矩形から近似曲線を求めることにより、スキャン画像内の文字サイズに関係なく画像の主走査方向の歪み補正における精度の高精度化を図ることができる。
(もっと読む)
ビデオイメージシーケンスのエンコーディング前のプリプロセシングデバイス及び方法
本発明は、ビデオイメージシーケンス(Ei)のエンコーディング前のプリプロセシングデバイス及び方法に関する。
本発明によればデバイスは、ビデオイメージシーケンス(Ei)に対して複数のモルフォロジー処理ステップを実行する手段(3,5,7,9)と、各モルフォロジー処理ステップの後、モルフォロジー処理の結果に対して重み付けを実行するための手段(4,6,8,10)を有する。 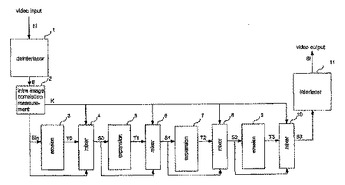 (もっと読む)
(もっと読む)
画像処理装置
【課題】有効なスムージング処理を施すことのできる画像処理装置を提供する。
【解決手段】画像領域内の曲線画像から画像領域外に連続する画像を予測し、その予測した画像および画像領域内の画像に基づいて、スムージング処理を施す。複数種類(図6(a)に示す2次曲線、図6(b)に示す3次曲線、および図6(c)に示す楕円)の画像が予測された場合には、ユーザの操作に基づいて、スムージング処理を施すか否かの選択、および、予測された複数種類の画像のうちいずれの画像を用いてスムージング処理を施すかの決定を行う。
(もっと読む)
障害物認識方法及び障害物認識装置
【課題】ミリ波レーダ等の探査結果を利用することなく、撮像装置の自車前方の撮影画像から自車前方の衝突の可能性がある停止中の先行車等の静止状態の障害物を、自車の走行状態による誤認識が生じないようにして、確実に認識する。
【解決手段】自車1に搭載された単眼カメラ(撮像装置)3の自車前方の撮影画像の垂直エッジのヒストグラムを算出し、このヒストグラムのピーク点の軌跡のトラッキング画像を形成し、自車1の旋回半径から自車1の直進走行状態を検出したときに限り、前記ピーク点の軌跡の車幅方向の広がりの時間変化特性から衝突予測時間を算出し、この衝突予測時間に基づいて自車前方の衝突可能性がある静止状態の障害物を認識する。
(もっと読む)
視覚情報処理装置および適用システム
【課題】
アズビルト3D−CADデータをリアルタイムで自動生成して利用することができる視覚情報処理装置及びその応用システムを提供する。
【解決手段】
移動可能な撮像装置の画像情報を入力とし、入力画像を処理して移動空間に存在する物体のCADデータを自動的に生成する機能と自動的に更新する機能を持たせる。また、CADデータの探索指令信号を入力とし、その指令信号に基づきCADデータを探索する機能と、探索したCADデータの情報を出力する機能を持たせる。更に、その視覚情報処理装置をロボット制御装置などと組み合わせて自律制御型の各種自動機械を構成する。
(もっと読む)
画像処理装置
【課題】有効なスムージング処理を施すことのできる画像処理装置を提供する。
【解決手段】画像領域内の曲線画像から画像領域外に連続する画像を予測し、その予測した画像および画像領域内の画像に基づいて、スムージング処理を施す。複数種類(図6(a)に示す2次曲線、図6(b)に示す3次曲線、および図6(c)に示す楕円)の画像が予測された場合には、ユーザの操作に基づいて、スムージング処理を施すか否かの選択、および、予測された複数種類の画像のうちいずれの画像を用いてスムージング処理を施すかの決定を行う。
(もっと読む)
画像処理装置
【課題】有効なスムージング処理を施すことのできる画像処理装置を提供する。
【解決手段】画像領域内の曲線画像から画像領域外に連続する画像を予測し、その予測した画像および画像領域内の画像に基づいて、スムージング処理を施す。複数種類(図6(a)に示す2次曲線、図6(b)に示す3次曲線、および図6(c)に示す楕円)の画像が予測された場合には、ユーザの操作に基づいて、スムージング処理を施すか否かの選択、および、予測された複数種類の画像のうちいずれの画像を用いてスムージング処理を施すかの決定を行う。
(もっと読む)
地盤高推定方法
【課題】従来の航空写真測量を用いる方法では、写真測量図化機を操作するオペレータに熟練と勘が必要とされ、さらに図化に長い時間を要した。熟練していなければ、精度が低く、再現性のある測定を実施出来ないと言う課題を有していた。一方レーザスキャナーデータによる方法は各社各様であり、この方法の詳細は公表されておらず、結果も整合性に欠けている、という問題があった。熟練を必要とせず、短時間で精度がよく、再現性のある地盤高測定法が強く望まれていた。
【解決手段】レーザスキャナーデータを利用し、樹冠からの反射点を多く含む上層面データと、地表面からの反射点及び樹冠と地表面の中間に存在する物体からの反射点データより、仮想下層面と仮想樹高分布を求め、仮想樹高分布にデータ処理を施し、補正樹高分布を得た後、上層面と補正樹高分布を用いて地盤高測定法を行うことによって前記課題を解決した。
(もっと読む)
三次元変形メッシュモデルを用いてオブジェクトの三次元ツリー状管状表面を自動セグメント化するための画像処理システム
三次元画像においてツリー状管状構造の全自動セグメント化のための演算手段を有する画像データ処理システムであって、ツリー状管状構造のツリー状中心経路を演算する手段(20)と、ツリー状管状構造のツリー状中心経路をポイントを形成したセグメントに分割する手段(21)と、ツリー状中心経路の個々のセグメントのために、セルを構成する一般円筒形メッシュを生成する手段(40)と、2つの一般円筒形メッシュを一体化する手段(50)と、を有する画像データ処理システム。 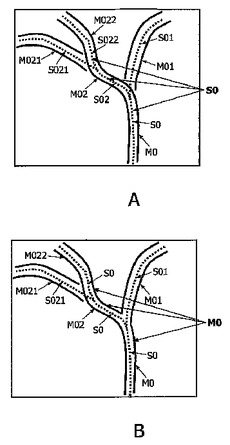 (もっと読む)
(もっと読む)
カメラ写真から得られる画像から原データを抽出する方法
本進歩的方法は、写真画像から原データを抽出することを可能にする。それは、各々のピクセルに対して画像の色構成要素の組合せV0[C,L]を決定するステップと、各々のピクセルに対してV<SB>N+1</SB>[C,L]値を算出するステップと、前記算出から所定回数を繰り返すステップと、その後に各々のピクセルにおいて最終的なVNfinal[C,L]画像の値を考慮するステップと、各々のピクセルに対して差分D[C,L]=VNfinal[C,L]−V0[C,L]を算出するステップと、ノイズのコンテクストデータVSを算出するステップと、原データD[C,L]をコンテクストデータVSを用いて算出するステップと、D*[C,L]を考慮しつつ修正I*[C,L]データを算出するステップと、所望の角度で抽出されたデータを表すステップと、からなる。  (もっと読む)
(もっと読む)
ガイドポイントを使用する空間−時間モデリングシステム及び方法
対象の空間−時間(4D)モデリング用の方法及びシステムは、3Dモデルを形成するための時間点と同一時間点で4Dモデルをサンプリングすることを有している。それから、この3Dモデルは、ユーザが供給したガイドポイント、画像フォース(例えば、画像エッジ)及び先行の形状モデルに基づいて適合される。3Dモデルの適合が完了すると、全4D形状モデルが更新される。心臓画像は、空間−時間的にモデリングされて、左心室(LV)の状態を決定することができる。 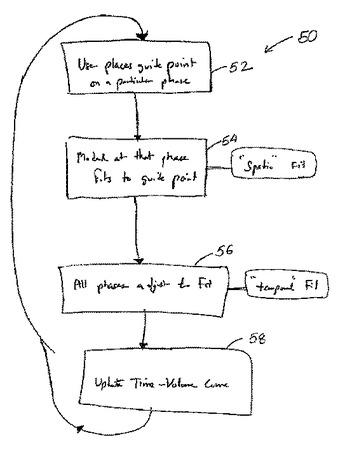 (もっと読む)
(もっと読む)
421 - 435 / 435
[ Back to top ]