
Fターム[5B057CH18]の内容
画像処理 (340,757) | 処理部 処理装置、処理システム (15,018) | 処理の切換、変更 (3,779)
Fターム[5B057CH18]に分類される特許
61 - 80 / 3,779
自車位置認識システム、自車位置認識プログラム、及び自車位置認識方法
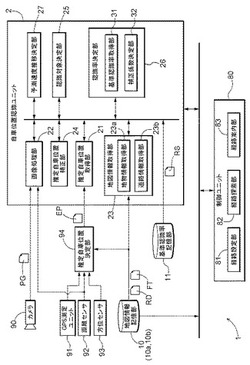
【課題】画像認識処理における認識対象を決定するための地物の認識率を、当該地物の撮影時の自車両の速度を考慮して決定することが可能な技術を実現する。
【解決手段】道路情報RDを取得する道路情報取得部23bと、地物が配置された道路区間である地物配置区間に推定自車位置EPが進入する前に、少なくとも道路情報RDに基づいて、地物配置区間内での自車両の速度推移の予測を示す予測速度推移を決定する予測速度推移決定部27と、地物情報FTと予測速度推移とに基づいて、地物配置区間に含まれる地物の画像認識に成功する割合である認識率を決定する認識率決定部26と、画像認識処理において認識対象とする地物を認識率に基づき決定する認識対象決定部25と、を備える。
(もっと読む)
画像処理装置、撮像装置、画像処理方法および画像処理プログラム

【課題】画像の補正精度を向上させる。
【解決手段】判定部11は、入力画像信号の値が、色分布において分割された複数の分割領域SP1〜SP3のいずれに含まれるかを判定する。これらの複数の分割領域はRGBの色成分ごとに定義されており、判定部11は、入力画像信号の値が複数の分割領域のいずれに含まれるかを色成分ごとに判定する。画像補正部12は、色成分ごとかつ分割領域ごとに補正係数が登録された補正係数記憶部13から、入力画像信号の値が含まれると判定された色成分ごとの分割領域にそれぞれ対応する補正係数を読み出し、出力画像信号におけるRGBの各出力値を、補正係数記憶部13から読み出した対応する色成分についての補正係数を用いて算出する。
(もっと読む)
画像処理装置
【構成】シャッタボタン28shが全押しされると、CPU26は、最適露光量,過大露光量および過小露光量に対応する3フレームの画像を取得し、2フレーム目および3フレーム目の画像データのヒストグラムを参照してシフト量SFT_SおよびゲインGN_Sを算出する。3つの露光量に対応して取得された3フレームの画像データは、算出されたシフト量SFT_SおよびゲインGN_Sを参照して縮小状態で合成される。シフト量SFT_SおよびゲインGN_Sは、合成縮小画像データのヒストグラムを参照して補正される。3つの露光量に対応して取得された3フレームの画像データは、補正後のシフト量SFT_CおよびゲインGN_Cを参照して合成される。
【効果】画像合成性能が向上する。
(もっと読む)
画像処理装置、画像処理方法、画像処理装置の制御方法
【課題】 画像を規定の単位領域ごとに処理する場合における誤動作を防止するための技術を提供すること。
【解決手段】 処理済みの画素値が着目単位領域について出力する最後の画素値である場合、着目単位領域内の全ての画素が入力されるまでその画素値の出力を待機させ、全ての画素が入力されると、待機させた画素値の出力を許可する。
(もっと読む)
画像処理装置、画像処理方法および画像処理システム
【課題】複数のゲーム機およびゲームソフトを用いることなく、複数のプレイヤーがゲームを協力プレイまたは対戦プレイすることができる画像処理装置、画像処理方法およびかかる画像処理装置を備える画像処理システムを提供すること。
【解決手段】本発明の画像処理装置は、複数の部分画像より構成される入力画像を取得する入力手段と、前記入力画像から、その少なくとも一部の領域を選択し、複数の抽出画像を抽出する画像抽出手段と、前記画像抽出手段が生成した前記抽出画像から、複数の出力画像を生成する出力画像生成手段と、前記出力画像生成手段が生成した前記複数の出力画像を、それぞれ出力する複数の出力手段とを備える。
(もっと読む)
被写体追尾装置およびカメラ
【課題】被写体を正確に追尾できること。
【解決手段】被写体追尾装置は、入力画像内に設定した第1の探索範囲内の画像に対してテンプレートマッチング処理を行い、追尾被写体位置を特定する第1の追尾手段12と、入力画像内に設定した第2の探索範囲内の画像に対してラベリング処理を行い、追尾被写体位置を特定する第2の追尾手段14と、を備え、第1の追尾手段12が特定した追尾被写体位置と、第2の追尾手段14が特定した追尾被写体位置との距離が所定値未満である場合には、第1の追尾手段12または第2の追尾手段14が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定し、第1の追尾手段12が特定した追尾被写体位置と、第2の追尾手段14が特定した追尾被写体位置との距離が所定値以上である場合には、第2の追尾手段14が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定する。
(もっと読む)
画像処理方法及び画像処理装置
【課題】オートアイリスによる背景画像からの現画像の輝度変化量を基に作成した輝度補正値に基づいて現画像を輝度毎に補正するときに、背景領域に侵入した異物に起因する適正でない輝度補正値を除去する。
【解決手段】画像処理装置は、まず背景画像の各輝度について、現画像との輝度差分値の度数を算出する(図3A)。次に背景画像の各輝度の画素数と各輝度の現画像との差分値の合計を用いて背景画像の各輝度の現画像との輝度差分の平均値を算出し、この平均値を基に、仮の補正テーブルを作成する(図3B)。次に近似関数及び係数を設定し、関数に仮の補正テーブルの輝度値及び輝度補正値を代入し、係数を未知数とした方程式を解いて係数を求める。求めた係数と近似関数を用いて、補正テーブルを作成する(図3C)。
(もっと読む)
画像処理装置及び方法
【課題】 画素飽和により、画像回復処理で飽和領域及びその周辺領域に発生するリンギングを低減させること。
【解決手段】 撮像素子により撮像光学系を介して入射する被写体像を撮像して得られた画像データに対して、撮像光学系の収差による画像の劣化を補正する回復処理を行う画像処理装置であって、撮像条件に応じて、回復処理に用いるフィルタを選択する画像回復フィルタ選択部(1002)と、選択されたフィルタを用いて回復処理を行う回復フィルタ適用部(1004)と、回復処理前後の画素値の差分に応じて求めた補正値を用いて、回復処理前の画素値を補正した画像データを得る補正手段(1005〜1007)とを有する。
(もっと読む)
画像処理装置、画像形成システム、及び画像処理プログラム
【課題】アンチエイリアシング処理によって、有色画像の描画領域と表面効果を与える描画領域とを重ねたときの端部の形状が不一致となることを抑制し、且つ目的とする光沢効果を該領域に付与する。
【解決手段】
アンチエイリアシング処理部309は、記録媒体に付与する表面効果の種類と表面効果を付与する記録媒体における描画領域とを特定する光沢制御版画像データと、有色画像の描画領域を示す有色版画像データと、について、アンチエイリアシング処理を行う。また、アンチエイリアシング処理部309は、有色版画像データにおける各画素の画素値を、各画素における該有色版画像データのラスタライズ前の描画領域の占める第1面積率を乗算した値に補正すると共に、光沢制御版画像データにおける各画素の画素値を、100%の面積率を乗算した値に補正する。
(もっと読む)
画像処理装置及び画像処理方法
【課題】
高画質かつデータ量の少ない画像を生成することができる画像処理装置及び画像処理方法を提供することである。
【解決手段】
実施形態の画像処理装置は、画像データの画素値の分布に基づいて閾値を算出し、算出した閾値に基づいて各画素を2クラスに分離する分離部と、分離部によって分離された一方のクラスの画素を特定の色にした純粋化画像データを作成する純粋化部と、純粋化画像データを疑似階調法によって二値化する疑似階調二値化部と、を備える。
(もっと読む)
画像表示装置、表示制御方法および表示制御プログラム
【課題】 拡大後のプレビュー画像を表示する時間と画質のいずれを優先するかを切り換えること。
【解決手段】 MFPは、アプリケーションデータと縮小画像データとを関連付けて記憶するHDDと、プレビュー画像を表示するLCDと、タッチパネルにより検出される位置の時間的な変化に基づいて、拡大操作を検出する拡大操作検出部11と、縮小画像データから生成された第1表示画像をプレビュー画像として表示する第1画像表示部21と、拡大操作の操作量より定まる倍率に基づいて、縮小画像データとアプリケーションデータのうちから処理対象データを決定する処理対象決定部13と、拡大操作が検出されることに応じて、処理対象データに基づいて第2表示画像を生成する第2表示画像生成部31と、第2表示画像をプレビュー画像として表示する第2画像表示部51と、を備える。
(もっと読む)
制御装置及びプログラム
【課題】測色されるべき色を適切に決定するための技術を提供する。
【解決手段】
第1の色空間で表現される色の値を第2の色空間で表現される色の値に変換するための色変換テーブルを修正する制御装置は、第1の取得手段と、決定手段と、第2の取得手段と、修正手段と、を備える。第1の取得手段は、前記色変換テーブルに含まれる前記第2の色空間の特定の色の値を用いて表現される色に対応する第1の測色値を取得する。決定手段は、前記特定の値と、前記第1の測色値の明度に依存する変化量と、に基づいて、前記第2の色空間で表現される複数の値を決定する。第2の取得手段は、前記複数の値を用いて表現される複数の色から求められる複数の第2の測色値を取得する。修正手段は、前記複数の第2の測色値を用いて、前記色変換テーブルに含まれる前記特定の値を修正する。
(もっと読む)
画像表示装置およびその制御方法
【課題】振動の度合いおよび画像の付帯情報に応じて表示倍率を変更することにより、画像表示装置に加わる振動が画像の読影に影響を及ぼさないようにすること。
【解決手段】可搬式の画像表示装置101は、振動検出部103によって振動を検出する。画像情報解析処理部105は、画像データに関連付けられた付帯情報を解析して解析結果を再生制御部104に出力する。再生制御部104は予め設定されている制御用データを用いて、装置に加わる振動の度合いと画像種別や撮影部位などの情報に応じて画像の表示倍率を決定して表示サイズ制御部107に指示する。表示サイズ制御部107は表示部108での画像の表示倍率を変更する。
(もっと読む)
画像形成装置
【課題】ユーザーが所望するコントラストの再生画像を得ることができる画像形成装置を提供する。
【解決手段】画像データの濃度分布を検出して最小入力濃度レベルaと最大入力濃度レベルbとを特定することで、ダイナミックレンジの幅Wを算出し、算出した画像データのダイナミックレンジの幅Wとレンジ閾値Dとを比較し、画像データのダイナミックレンジの幅Wがレンジ閾値Dよりも狭いと判定されると、最小出力濃度レベルαと最大出力濃度レベルβとの入力を受け付け、受け付けた最小出力濃度レベルαと最大出力濃度レベルβとに基づいて画像データのダイナミックレンジWを広げる階調調整処理を行うい、階調調整が行われた画像データに基づいて記録処理を行う。
(もっと読む)
画像処理フィルタ統合装置、画像処理フィルタ統合方法、およびプログラム
【課題】従来の画像処理フィルタ統合装置においては、例えば、一の画像に対して2以上の画像処理フィルタを適用する必要があり、処理が煩雑になっていた。
【解決手段】1以上のプログラムを格納するプログラム格納部と、1以上の画像処理フィルタを格納する画像処理フィルタ格納部と、プログラムをプログラム格納部から取得するプログラム取得部と、統合可能である画像処理フィルタ識別子を、プログラム取得部が取得したプログラムから検出する画像処理フィルタ検出部と、画像処理フィルタ検出部が検出した画像処理フィルタを統合する画像処理フィルタ統合部と、当該画像処理フィルタの識別子でプログラム中の画像処理フィルタ識別子を置換する変更部とを具備する画像処理フィルタ統合装置により、2以上の画像処理フィルタを統合することができる。
(もっと読む)
画像処理装置、駐車支援システム、画像処理方法及びプログラム
【課題】画像に基づいて車両の駐車対象となる駐車枠の存在を迅速に判定する。
【解決手段】画像処理装置2では、横枠線検出部44が画像G中の1つの横枠線検出領域に基づいて駐車枠の横枠線L1を検出し、縦枠線検出部45が画像G中の2つの縦枠線検出領域に基づいて2つの縦枠線を検出する。さらに、接続部検出部47が、画像G中の2つの縦枠線検出領域に基づいて2つの接続部を検出する。そして、駐車枠判定部48は、これらの検出結果に基づいて駐車対象となる駐車枠の存在を判定する。画像Gの全体ではなく画像G中の限られた領域に基づいて駐車枠の存在を判定するため、駐車枠の存在を迅速に判定できる。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】出力画像が最適な鮮鋭度を持つ画像となるように空間周波数処理を行うことができる画像処理装置を提供する。
【解決手段】描画命令解釈部11でイメージと判定されたオブジェクトは第1解像度変換部15または第2解像度変換部17で出力画像の解像度に変換され、また色補正部16で色補正処理が施される。空間周波数処理部18は、イメージのオブジェクトの解像度変換前の解像度と出力画像の解像度の比(拡大率)に応じた空間周波数処理を行う。その際に、拡大率が1より小さい第1の値以下の場合と、拡大率が1より大きい第2の値以上の場合には、当該オブジェクトに対しては空間周波数処理を行わない。色空間変換部19で色空間変換後、オブジェクトは描画部13で出力画像に描画される。イメージのオブジェクトが描画された領域には付加情報を付加し、出力画像処理部14では空間周波数処理を行わない。
(もっと読む)
画像通信システム及び端末装置並びにプログラム
【課題】本体画像に合成表示されるアクセサリ画像を生成する場合に、識別力の高いアクセサリ画像を生成できるようにする。
【解決手段】本体画像(キャラクタ)にアクセサリ画像を合成して表示する携帯電話機1とサーバ装置5とが通信ネットワークを介して画像の送受信を行う画像通信システムであって、携帯電話機1側で撮像部15により被写体を撮影すると、撮影された画像内の被写体をキャラクタの識別用の画像として認識し、サーバ装置5は、この認識された識別画像に基づいてアクセサリ画像を生成する。携帯電話機1は、生成されたアクセサリ画像を本体画像(キャラクタ)に合成表示させる。
(もっと読む)
情報処理装置、情報処理方法およびプログラム
【課題】シーン検出精度の向上および補正画像の画質の向上を可能にした情報処理装置を提供する。
【解決手段】入力される画像に対してシーンカテゴリが属する確率である帰属率をシーンカテゴリ毎に求める帰属率算出手段と、撮影時の環境を示す情報である環境情報を取得する取得手段と、シーンカテゴリ毎の帰属率に環境情報を反映させて合成補正値を求める補正値算出手段と、合成補正値を用いて画像を補正する画像補正手段とを有する。
(もっと読む)
マシンビジョン検査システムおよびその位置測定結果の決定方法
【課題】複数の視野に分割された対象を高精度に測定することができるマシンビジョン検査システムおよびその位置測定結果の決定方法を提供する。
【解決手段】マシンビジョン検査システムは、第1動作状態においてスケールベースの測定により第1対象FE1の位置を測定する。第2動作状態では、第1対象から第2対象に至る途中で重複画像CIA〜CICを撮影し、画像相関を利用して重複画像CIA〜CICの相互の画像変位を測定し、第1対象の位置と画像変位のセットとを合わせて第2対象FE2の位置を測定する。
(もっと読む)
61 - 80 / 3,779
[ Back to top ]