
Fターム[5B057CH20]の内容
画像処理 (340,757) | 処理部 処理装置、処理システム (15,018) | 処理システム、その他の処理装置 (1,010)
Fターム[5B057CH20]に分類される特許
61 - 80 / 1,010
情報送受信システム及び情報送受信方法
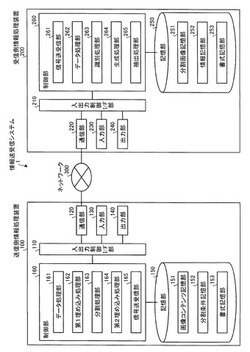
【課題】情報の安全な送受信を実現するための手段として電子透かしを利用すること。
【解決手段】送信装置において、第1埋め込み処理部が、画像に任意の文字列の電子透かしを埋め込む。分割処理部が、第1埋め込み処理部によって任意の文字列が埋め込まれた第1画像を任意の数の分割画像に分割する。第2埋め込み処理部が、分割処理部によって分割された分割画像それぞれに、第1画像における当該分割画像の位置を示す位置情報の電子透かしを埋め込む。受信装置において、識別処理部が、第2画像それぞれに埋め込まれた位置情報を抽出し、抽出した位置情報に基づいて、第1画像における当該第2画像それぞれの位置を識別する。生成処理部が、識別処理部によって識別された位置に第2画像それぞれを配置した画像を生成する。抽出処理部が、生成処理部によって生成された画像に埋め込まれた任意の文字列を抽出する。
(もっと読む)
ユーザー認証装置

【課題】屋外や建物の出入り口等の環境光の変動が激しい場所であっても、ユーザー認証を精度良く行うことができるユーザー認証装置を提供することにある。
【解決手段】投光手段12を制御して所定周波数の変調信号で強度を変調した照射光を対象空間に照射させ、投光手段12の照射光の強度が異なるタイミングで撮像手段13を制御して高照度画像と低照度画像を撮像手段13に出力させる。高照度画像と低照度画像の各画素値の差分をとり、環境光による影響を除去した振幅画像を生成する。故に、振幅画像を元に顔検出手段16で検出したユーザーの顔画像からも環境光の影響が除去され、その結果、認証手段18cでは環境光の影響が除去されたユーザーの顔画像を用いてユーザー認証が行われるから、屋外や建物の出入り口等の環境光の変動が激しい場所であってもユーザー認証を精度良く行うことができる。
(もっと読む)
情報処理装置、情報処理方法
【課題】 GPUを用いた処理を実現するために作成するプログラムを、より簡便に作成する為の技術を提供すること。
【解決手段】 CPU101は、関数nt_parallel_for()が記されたソースプログラムをコンパイルすることで得られるコンピュータプログラムを取得し、関数nt_parallel_for()の引数である文字列を取得する。CPU101は、GPU用のドライバが解釈可能な中間コードを文字列から生成し、中間コードからドライバが生成した実行形式のコードを専用メモリに転送し、転送したコードをGPUが実行することでGPUが生成したデータを取得する。
(もっと読む)
デバイスリンクプロファイル作成方法、プログラム及びデバイスリンクプロファイル作成装置
【課題】デバイスリンクプロファイル(DLP)の更新に係るユーザの負担を軽減する。
【解決手段】DLP作成方法は、複数のDLPを、当該複数のDLPのそれぞれについて各DLPを作成するために用いたデバイスプロファイル(DP)に関する情報と共に記憶部14のDLP管理DB142に記憶する工程と、DPを記憶部14のDP管理DB141に複数記憶する工程と、DPが更新された場合にDP・DLP管理部103がその更新を検知し、DP・DLP管理部103が複数のDLPのうち「更新の対象となったDPを用いて作成されたDLP(更新対象DLP)」を検知し、更新されたDPを用いてDLPを自動的に作成し、作成されたDLPによって更新対象DLPを更新する工程と、を有する。
(もっと読む)
施肥マップ生成システム,その方法,産業用ヘリコプタ,サーバ,可変施肥機
【課題】広面積の圃場に対してもメッシュ毎の施肥を行ない、的確で効率的な施肥作業を可能とする。
【解決手段】産業用無人ヘリコプタに搭載された各種センサによる圃場のリモートセンシング(遠隔探査)を行い、土壌の画像及び自然光の反射率を計測する。一方、圃場の数地点の土壌をサンプリングして分析し、熱水抽出窒素を得る。得られたリモートセンシングデータと、土壌サンプリングデータとに基づいて、熱水抽出性窒素マップを生成する。この熱水抽出性窒素マップと、作付けする作物や使用する肥料のデータを基に演算処理を行い、例えば、10mメッシュ単位の施肥マップを生成する。生成した施肥マップと、GPS位置情報を基に、自動可変施肥機を自動制御し、適切な肥料を吐出して施肥を行なう。
(もっと読む)
平面図生成装置及び平面図生成方法
【課題】車載カメラ画像及び路側カメラ画像に基づいて平面図を生成する場合に、高精度の平面図を生成することができる平面図生成装置及び平面図生成方法を提供すること。
【解決手段】位置/向き推定部111が、車載カメラ画像の内の道路領域画像を除く背景領域画像を平面変換することにより生成された第1の垂直平面画像と、路側カメラ画像の内の道路領域画像を除く背景領域画像を平面変換することにより生成された第2の垂直平面画像とに基づいて、車載装置100が搭載されている車両の位置及び向きを推定し、パラメータ調整部112が、推定された位置及び向きに基づいて、平面変換で用いられるパラメータを調整し、水平平面画像生成部113が、車載カメラ画像の内の道路領域画像を、パラメータ調整部112で調整されたパラメータを用いて平面変換することにより、水平平面画像を生成する。
(もっと読む)
画像処理装置、X線撮影装置、画像表示方法、画像比較方法、および画像表示プログラム
【課題】複数の撮影画像45を表示して観察する際に、観察者が一部の撮影画像45や全部の撮影画像54に対して高い操作性で操作できるようにする。
【解決手段】記憶手段23から読み出して表示手段5に表示している撮影画像45に対して操作手段6により画像操作を許容し、リンクボタン59によりリンクが設定されていれば1つの撮影画像45に対して操作手段6によって画像操作された内容をリンク設定された他の撮影画像45にも同時に適用するステップS14を実行し、リンクボタン59によりリンクが設定されていなければ1つの撮影画像45に対して操作手段6によって画像操作された内容をその撮影画像45に対して適用して他の撮影画像45に適用しないステップS15を実行する。
(もっと読む)
画像処理装置、画像処理方法、及びプログラム
【課題】ユーザの操作に応じて容易にCG素材の内容を変更する。
【解決手段】作業メモリ87aには、CG素材を編集可能な保存形式であるCG記述データが、画像の生成に使用するために展開されており、制御部81は、作業メモリ87aの内容への制御を記述した情報を表す派生情報に従って、作業メモリ87aの一部への書き込み動作を制御し、画像生成部87は、作業メモリ87aの内容に基づいて、CG画像を生成する。本発明は、例えばCG画像を生成するコンピュータに適用できる。
(もっと読む)
画像処理装置および画像処理方法
【課題】 撮影データに画像データを合成処理する際に、違和感の無い画像データを高速に生成することができる画像処理装置および画像処理方法を提供することを目的とする。
【解決手段】 位置情報取得部104は、位置情報を取得し、日時情報取得部103は、位置情報の取得時の日時である日時情報を取得し、そして、気象情報取得部102は、気象情報を取得する。そして、照明環境計算部105は、照明環境情報を計算し、画像処理部109は、計算された照明環境情報に基づいて、オブジェクト記憶部108から必要なオブジェクトを取り出し、照明環境情報に基づいたオブジェクトを生成する。一方、撮影部106は、撮影した撮影データを取得し、画像処理部109は、取得された撮影データと、生成されたオブジェクトとを合成して、表示部110は、オブジェクトが合成された撮影データを表示することができる。
(もっと読む)
画像解析装置
【課題】効率的な並行処理で画像を解析する。
【解決手段】
複数のプロセッサ15で映像を並列に解析処理する解析処理部15aと、異なる視点で撮影された共通の領域の各映像をプロセッサ数に基づき分割して分割映像を出力する分割部13と、解析処理部15aの各プロセッサ毎に分割映像の解析処理時間を計測する処理時間計測部15bと、処理時間計測部15bで計測された第1の視点からの映像の分割映像毎の解析処理時間に基づき第2の視点からの映像の分割映像を並び替えてプロセッサ15に割り当てる割当部14とを備えた。
(もっと読む)
画像処理システム及び車両制御システム
【課題】高速道路だけでなく一般道を含め様々な車両走行路の走行中においても画像認識を用いて正確な自車位置検出が可能となる技術の構築。
【解決手段】車両からの風景を撮影した撮影画像に基づいて風景画像の認識を行う際に利用される参照データを作成する画像処理システム。所定形状の道路区間において撮影した撮影画像及び当該撮影画像の撮影位置を入力するデータ入力部と、前記道路区間内の任意の地点を特定地点として、前記道路区間を通過するための前記特定地点での目標運動量を規定する目標運動量設定部と、前記特定地点での前記撮影画像から生成された被マッチングデータを、特定地点の位置及び特定地点における目標運動量と関係付けて、前記参照データとしてデータベース化する参照データデータベース化部とを備えている。
(もっと読む)
画像処理装置及び画像処理方法及び画像処理プログラム
【課題】ScanSARモードで観測されたデータからレーダ画像を効率的に生成する。
【解決手段】画像処理装置100において、バーストデータ記憶部101は、ScanSARの各バーストに対する地上からの散乱波のデータをバーストデータとして記憶装置152に記憶する。スキャンデータ生成部102は、記憶装置152からバーストデータを、対応するスキャンごとに処理装置151により読み出して、スキャンごとに、読み出したバーストデータの隙間をゼロで埋めてスキャンデータを処理装置151により生成する。画像処理部103は、スキャンごとに、スキャンデータ生成部102により生成されたスキャンデータからレーダ画像を処理装置151により生成する。
(もっと読む)
情報処理装置およびその動作方法
【課題】 従来、効率良く、被写体を撮像した撮影者毎に当該被写体の画像データを分類することが困難であった。
【解決手段】そこで、本発明の情報処理装置は、人物を特定する顔画像データを保持し、第1の被写体 を撮像し、前記第1の被写体の撮像に応答して、前記第1の被写体を撮像している撮影者の顔を前記第2の被写体として撮像し、前記第2の被写体の画像データと、前記人物を特定する顔画像データとに基づいて、前記第2の被写体に相当する人物を特定し、前記第1の被写体の画像データを、特定された前記人物に属する画像データとして記憶手段に記憶させる。
(もっと読む)
サーバ装置
【課題】サーバ装置は、表示装置で提供する写真データの画質を損なうことなく、サーバ装置と表示装置間のデータ配信時間および表示装置のデコード時間を短縮することを目的とする。
【解決手段】サーバ装置は、前記表示装置と通信を行なう通信インタフェースと、縮小画像データ、及び、オリジナル画像データを有する画像データを記録した記録媒体から、画像データを読み出し、前記通信インタフェースを介して前記表示装置に送信する送信手段と、前記画像データの取得要求情報、及び、前記表示装置の表示解像度を示す情報を、前記通信インタフェースを介して取得する取得手段と、を備える。そして、前記送信手段は、前記取得手段が取得要求情報を取得した場合、前記読み出した画像データを、前記取得した表示解像度を示す情報に応じて変換し、前記表示装置に送信する。
(もっと読む)
画像処理装置、及び画像処理プログラム
【課題】処理部に交互に転送する元画像データの画像の構成や、画像処理の内容の如何に関わらず、画像出力装置の動作速度に間に合うように出力画像データを供給する。
【解決手段】画像処理装置に、第1の記憶部にデータがページングされる第1の記憶領域と、ページングされない第2の記憶領域とを有する第2の記憶部を備え、転送部が、データ転送時間の画像処理時間に対する比率に基づいて、元画像データを第1の記憶領域から複数の処理部に転送する第1の転送モードと、一旦第1の記憶領域から前記第2の記憶領域に転送してから処理部に転送する第2の転送モードのいずれかを切り替えて実行するので、元画像データの画像の構成や、画像処理の内容の如何に関わらず、画像出力装置の動作速度に間に合うように出力画像データを供給できる。
(もっと読む)
画像処理装置
【課題】他の装置に分散して画像処理を行う場合であっても、ユーザが望む処理結果を得ることを可能とする。
【解決手段】MFP101は、通信を介して接続する他の画像処理装置から、他の画像処理装置が実施する画像処理の最小単位である単位画像処理と、単位画像処理の処理能力とを示す機器情報を取得する。MFP101は、ユーザからの操作指示により指示された画像処理を、指示された画像処理にかかる単位画像処理ごと画像処理部19で行う。CPU16は、処理結果を含む画像処理が指示された場合に、指示された画像処理にかかる単位画像処理の各々を、機器情報に示された他の画像処理装置の処理能力と、自装置の処理能力とをもとに、処理結果から導き出された条件を満たす画像処理装置に分散して行わせる。
(もっと読む)
仮想物体を現実の物理物体に変換する方法
物理的対象物の画像を生成するシステム及び方法
情報処理装置、情報処理方法、コンピュータプログラム、及びコンピュータプログラムを記録した記録媒体
【課題】 モジュールの調整を行う場合、その調整の都度、各処理において計測した結果画像を確認することができず、開発者が負荷の大きい作業を行わなければならないといった問題がある。
【解決手段】 ユーザからの操作でモジュールが選択されることにより、当該モジュールに紐づいた処理結果テーブル418のレコードを取得し、取得したレコードに格納された識別箇所1203と識別結果1204を処理画像と共に表示することができるので、画像処理を行うためのプログラム作成の支援を実現し得ることが可能となる。
(もっと読む)
多重プロセッサを用いて状態情報を失わずにビデオ及び/又はグラフィクスデータを処理するための方法、システム及び装置
【解決手段】
方法、システム及び装置は、第1のグラフィクス処理回路及び第2のグラフィクス処理回路の組み合わせを用いるビデオ及び/又はグラフィクスデータの処理であって第1及び第2のグラフィクス処理回路の間で処理を転送する間に状態情報を喪失することのない処理を提供する。処理されるべきビデオ及び/又はグラフィクスデータは、例えば、ホストプロセッサ等のプロセッサ上で実行中のアプリケーションによって供給され得る。1つの例においては、装置は複数の単一命令多重データ(SIMD)実行ユニットを含む少なくとも1つのGPUを含む。GPUはネイティブ機能コードモジュールを実行するように動作する。装置はまた、第1のGPU上の複数のSIMD実行ユニットと同じプログラミングモデルを有する複数のSIMD実行ユニットを含む少なくとも第2のGPUを含む。更に、第1及び第2のGPUは同じネイティブ機能コードモジュールを実行するように動作する。ネイティブ機能コードモジュールは、現在の動作モードから所望の動作モードへの移行が望ましい(例えば一方のGPUは停止され他方のGPUは開始される)旨のホストプロセッサ等の第1のプロセッサからの通知に応答して、少なくとも第1のGPUに少なくとも第2のGPUのための状態情報を提供させる。第2のGPUは、第1のGPUによって提供される状態情報を取得すると共に同じネイティブ機能コードモジュールを介して状態情報を用いて第1のGPUが中止した処理を継続するように動作する。第1のプロセッサは、少なくとも第1の及び少なくとも第2のGPUに動作可能に結合される。
(もっと読む)
61 - 80 / 1,010
[ Back to top ]