
Fターム[5B057DA06]の内容
Fターム[5B057DA06]の下位に属するFターム
Fターム[5B057DA06]に分類される特許
41 - 60 / 1,346
環境認識装置および環境認識方法
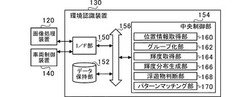
【課題】水蒸気や排気ガス等の浮遊物を精度よく検出する。
【解決手段】環境認識装置130は、検出領域122内に存在する対象部位の、自車両1に対する相対距離を含む位置情報を取得する位置情報取得部160と、位置情報に基づき、複数の対象部位をグループ化して対象物とするグループ化部162と、対象物の画像における輝度を取得する輝度取得部164と、対象物の画像における輝度のヒストグラムを生成する輝度分布生成部166と、ヒストグラムに対する統計解析により、対象物が浮遊物か否かを判断する浮遊物判断部168と、を備える。
(もっと読む)
画像解析装置、画像解析方法、画像解析プログラム及び記録媒体

【課題】解析対象の動きをより正確に解析し、解析結果に対する把握性を向上させる装置及び方法等を提供する装置及び方法等を提供する。
【解決手段】画像解析装置SSは、矩形領域20に存在するベクトル情報を抽出し、前記抽出された所定範囲内に存在するベクトル情報に含まれる方向に基づいて、当該所定範囲内に存在するベクトル情報の一又は複数の代表的な方向を算出する。
(もっと読む)
奥行調整が可能な立体映像表示装置
【課題】 背景領域に過度に奥行範囲を割り当てることなく、手前側の奥行感が強調され、自然な奥行感を再現できる立体映像表示装置を提供する。
【解決手段】1実施形態の立体映像表示装置は、入力画像から奥行値を生成する奥行情報生成部11と、前記奥行値を調整し、調整された奥行値を生成する奥行調整部12と、前記入力画像及び前記調整された奥行値から、右視点用画像及び左視点用画像を生成する画像生成部と、前記右及び左視点用画像に基づいて、立体映像を表示する画像表示部14と、を備え、前記奥行調整部12は、各奥行値の頻度に対して、奥行値に応じた重み付けを行うことによって奥行値の重み付きヒストグラムを求め、該ヒストグラムから得られる重み付き累積ヒストグラムを用いて奥行値を調整することを特徴とする。
(もっと読む)
人体検出装置
【課題】人体やペットの移動方向を確実に得られることができるようにするとともに、移動領域の長手方向を確実に得られることができるようにすることを目的とする。
【解決手段】住宅内の床面を撮影するとともに、撮影方向が床面と垂直になる位置に撮影装置1を設置し、撮影装置1によって撮影された画像の変化領域を解析して移動物体の移動方向を取得するとともに、取得した移動方向と変化領域の長手方向とが一致しなかった場合に、人体判定装置2にて人体が動いたと判定するようにしている。これにより、人体を検出するために使用される撮影装置1によって住宅内の床面が真上から撮影されるので、人体やペットが移動する際に撮影装置1に近付いたり遠ざかったりすることがなくなり、人体やペットの移動方向を確実に得ることができるとともに、移動領域の長手方向を確実に得ることができる。従って、人体とペットとをより確実に区別することができる。
(もっと読む)
走行支援装置及び走行支援方法
【課題】撮像手段の数を増加させる必要が無く、且つ、移動体の真後ろの二輪車について検出することが可能な走行支援装置及び走行支援方法を提供する。
【解決手段】視点変換部31は、カメラ10による撮像にて得られた画像を鳥瞰視される状態へ視点変換し、位置合わせ部32aは、視点変換された異なる時刻の、一方の隣接車線から区分線DLを跨いで自車両Vの直後方側まで設けられた第1の所定領域A1の画像と、他方の隣接車線から区分線DLを跨いで自車両Vの直後方側まで設けられた第2の所定領域A2の画像とについて、それぞれ個別に位置を合わせる。差分値検出部32bは、位置合わせされた異なる時刻の第1の所定領域A1及び第2の所定領域A2の画像データそれぞれの差分値を検出する。後続車両検出部33aは、検出された第1の所定領域A1の差分値と第2の所定領域A2の差分値との隔たりから後続の二輪車を検出する。
(もっと読む)
画像処理装置及びその制御方法、プログラム
【課題】 撮像画像中の被写体の身長を好適かつ精度良く測定する。
【解決手段】 撮像画像に含まれる等高線指標に基づいて作成された等高線データを記憶する。記憶された等高線データを、撮像画像中に表示させる。
(もっと読む)
運転支援装置
【課題】運転支援装置において、オプティカルフロー検出等の画像処理機能を向上することにある。
【解決手段】画像処理手段(5)は、広角レンズ(3)を有する撮像手段(4)により撮像される画像上の各画素の座標に対応するイメージプレーン上の各画素の座標を記録した記録手段(8)と、撮像手段(4)により撮像された画像上の画素位置から記録手段(8)に記録された座標の対応関係に基づいてイメージプレーン上の画素位置を取得する画素位置取得手段(9)とを備える。
(もっと読む)
姿勢認識装置、姿勢認識方法、プログラム及び記録媒体
【課題】載置面上に自由に置かれた物体を高速に認識する。
【解決手段】安定姿勢計算部6は、3次元モデル情報記憶部5から3次元モデルの情報を読み出して、物体が載置面上で静止すると予測される物体の姿勢に対応する3次元モデルの安定姿勢を計算する。2次元投影画像生成部7は、安定姿勢計算部6で計算された安定姿勢の3次元モデルを観測して得られる2次元投影画像を生成する。2次元投影画像記憶部8は、2次元投影画像生成部7により生成された2次元投影画像を記憶する。載置面上に載置された物体の姿勢を認識する際には、画像照合部9は、撮像部101により撮像されて得られた撮像画像と、2次元投影画像記憶部8に記憶された2次元投影画像との一致度を計算する画像照合を行う。姿勢認識部10は、一致度が最も高い2次元投影画像に対応する3次元モデルの姿勢を、物体の姿勢として認識する。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム、及び、撮像装置
【課題】動き補償誤差を適切に減少させ、回路規模や計算量を大きく増加させることなく揺れを少なくしつつノイズを除去した動画像を得る。
【解決手段】基準画像と少なくとも一枚以上の参照画像とを加重加算する画像処理装置は、前記基準画像中の対象画素のコントラスト値を算出するコントラスト算出部(102)と、前記基準画像と前記参照画像との間の動きベクトルを算出する動きベクトル算出部(120)であって、前記コントラスト値を使用して前記動きベクトルの算出方法を変更する動きベクトル算出部と、前記動きベクトル算出部により算出された動きベクトルに基づいて、前記参照画像を前記基準画像に対して動き補償する動き補償部(106)と、前記基準画像と前記動き補償された参照画像とを前記対象画素ごとに加重加算する加重加算部(108)と、を備える。
(もっと読む)
情報処理装置、情報処理方法及びプログラム
【課題】ユーザが注目する領域に関連する画像データを、煩雑な操作を行うことなく優先的に表示させる。
【解決手段】取得部1016は、ユーザによって指定された画像データの一部の領域を特定する。順序付け部1018は、上記領域に含まれるオブジェクトと、複数の画像データに含まれるオブジェクトとに基づいて、複数の画像データの表示順序を制御する。
(もっと読む)
監視装置及びプログラム
【課題】監視領域の撮影画像に基づいて監視を行う際、撮影画像の各画素について正確な三次元空間座標及び空間属性を保持するとともに常に最新の情報に更新することができる監視装置を提供する。
【解決手段】監視領域を連続撮影して得られた撮影画像の各画素に三次元座標により定まる位置を示す三次元空間座標を設定する設定手段(S103)と、撮影画像の各画素に該各画素が属する画像部位に対応する空間属性を付与すると共に、画像部位と隣接する画素の各々に画像部位との境界を示す空間属性を付与する付与手段(S113)と、境界を示す空間属性が付与された画素の各々から特徴量を繰り返し抽出する抽出手段(S117)と、抽出された特徴量の変化量が予め定められた閾値を超えた場合に、設定された三次元座標により定まる位置を示す三次元空間座標になるように前記画素の各々に設定された三次元空間座標を変更する変更手段(S129)と、を備えた。
(もっと読む)
情報処理装置、画像表示装置、および情報処理方法
【課題】ユーザにとって処理効率の向上を図る情報処理装置を提供する。
【解決手段】情報処理装置1は、表示装置10に表示する表示内容を生成し、両眼視差により観察者9が観視可能な立体画像を表示する立体画像表示装置である表示装置10に出力する。情報処理装置1は、位置情報入力部2により観察者9の位置情報を入力し、変化検出部3により位置情報の変化を検出する。切替部4は、観察者9の位置情報の変化の検出にもとづいて、付属情報表示の表示状態を、第1の表示状態から第1の表示状態に比較して観察者が観察容易な第2の表示状態に切り替える。表示出力部5は、主表示6、および主表示6に関する付属情報を表示する付属情報表示7、8を表示装置10に出力する。
(もっと読む)
物品検出装置および静止人物検出装置
【課題】持ち込み物品を効果的に検出する。
【解決手段】物品検出装置は、監視領域を撮影した監視画像を順次取得する撮像部20と、監視領域の背景が撮影された背景画像と人物の外形を模した人物モデルを記憶する記憶部21と、静止している物品を検出する制御部22と、を具備する。制御部22は、監視画像と背景画像から変化領域を抽出する変化領域抽出手段220と、変化領域に前記人物モデルを重ね当該変化領域の内側でかつ当該人物モデルの外側である物品領域の特徴を記憶部21に記憶する物品領域抽出手段222と、順次取得された画像にて変化領域を時間的に追跡し変化領域が静止しているかを判定し静止物体領域を検出する静止物体領域検出手段223と、静止物体領域が検出されると、静止物体領域が前記物品領域の特徴を有するかを判定し物品領域の特徴を有する場合に当該静止物体領域が物品であると判定する異常判定手段224とを有する。
(もっと読む)
路面状態検出装置、路面状態検出方法、及び路面状態検出プログラム
【課題】正しく路面の勾配を検出することができる路面状態検出装置、路面状態検出方法、及び路面状態検出プログラムを提供する。
【解決手段】画像取得部は画像を取得し、区分線認識部は前記取得した画像から路面に表された1つの車線の左側を区分する区分線と当該車線の右側を区分する区分線を抽出し、路面状態判定部は前記左側を区分する区分線の方向と前記右側を区分する区分線の方向に基づき、前記路面の勾配の変化を表す勾配情報を判定する。
(もっと読む)
異常検知装置
【課題】複数の人物が制圧されて通報操作ができない状態であっても、そのような異常事態を自動的に検出し、非常通報を行うことを可能とする。
【解決手段】監視画像から人物を人物領域として抽出する人物領域抽出手段220と、人物領域から当該人物の姿勢を判定する姿勢判定手段222と、順次取得される監視画像にて同一人物の人物領域を追跡する人物追跡手段221と、追跡している人物毎に姿勢変化があったか否かを判定する姿勢変化判定手段223と、略一斉と判断される所定時間内に姿勢変化があった人数が基準以上であるとき異常と判定する異常判定手段225とを備える異常検知装置とする。
(もっと読む)
画像監視装置
【課題】侵入検知の性能を維持しながら所定物品の設置を許容することにより、正規利用者の利便性を向上可能な画像監視装置を提供する。
【解決手段】変化領域抽出部231は、撮像部21により監視空間が順次撮像された監視画像と記憶部22に記憶された背景画像221とを比較して変化領域を抽出し、物体領域検出部232は変化領域の外形を所定図形にて近似して物体領域を検出する。物体領域追跡部233は前後する時刻に検出された物体領域のうち特徴が互いに類似する物体領域を対応付け、対応付けた物体領域ごと検出位置から移動距離を算出する。遮蔽異常判定部235は物体領域の移動距離を予め設定された静止判定値と比較するとともに当該物体領域に占める変化領域の割合を算出して予め設定された遮蔽容認値と比較し、移動距離が静止判定値未満且つ割合が遮蔽容認値以上であるときに侵入者の検知を妨げる遮蔽物があると判定する。
(もっと読む)
情報処理装置および情報処理方法、記録媒体、並びにプログラム
【課題】対象を迅速に追跡できるようにする。
【解決手段】物体認識部は、画像から認識物体を認識する。予測部は、認識物体の次の位置および形状を予測する。そして、物体認識部は、予測部により予測された位置に対応する画像の領域内から予測された形状の認識物体を認識する。本開示は、例えば情報処理装置に適用できる。
(もっと読む)
異物検知装置
【課題】低SNR環境下でも、異物を正確に検知することができる異物検知装置を得ることを目的とする。
【解決手段】三次元画像の縦方向成分が同一の画素単位に、異物の検知処理を開始する前に三次元画像撮像装置1から出力された各画素の反射強度値Ii,jの中で、最大の反射強度値Iimaxと最小の反射強度値Iiminを取得して、最大の反射強度値Iimaxを上限閾値THUPに設定するとともに、最小の反射強度値Iiminを下限閾値THLOWに設定する閾値設定部11を設ける。
(もっと読む)
対象物の認識システム、見守りシステム、監視システム
【課題】エネルギ照射装置と2次元撮像装置を用いることで、種々の条件下で頑健に動作する対象物認識システムおよび見守りシステム、監視システムを提供する。
【解決手段】観測対象となる空間に向けて、所定の位置から照射方向を変えながら、エネルギを照射する照射手段と、照射手段で照射されたエネルギの反射エネルギを2次元的に感知し、対象となる空間を2次元的に撮像する撮像手段と、撮像手段で撮像した撮像画像上の切断曲線の特徴を用いて対象物の認識を行う認識手段とを備える対象物認識システムおよび該システムを備える見守りシステム、監視システム。
(もっと読む)
ネットワークシステム、登録方法、およびコントローラ
【課題】訪問者の画像をより有効に利用することができるネットワークシステムを提供する。
【解決手段】訪問者を撮影するためのカメラと、コントローラ100とを備えるネットワークシステムが提供される。コントローラ100は、メモリ101と、カメラから訪問者の画像を受信するための通信インターフェイス105と、登録者を識別するための識別情報を取得して、識別情報と訪問者の画像から得られる特徴情報とを対応付けてメモリ101に記憶するためのプロセッサ110とを含む。
(もっと読む)
41 - 60 / 1,346
[ Back to top ]