
Fターム[5B057DA06]の内容
Fターム[5B057DA06]の下位に属するFターム
Fターム[5B057DA06]に分類される特許
61 - 80 / 1,346
接近物体検知装置及び接近物体検知方法
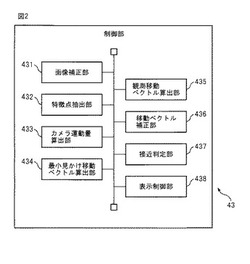
【課題】低い処理負荷で、自車両と接近物体の位置関係及び自車両が移動しているか否かによらず、接近物体を検知できる接近物体検知装置を提供する。
【解決手段】接近物体検知装置は、異なる時刻に撮像部(2)により取得された車両(10)の周囲を撮影した二つの画像から特徴点を抽出する特徴点抽出部(432)と、その二つの画像間で同一の物体に関する特徴点からその物体の画像上の観測移動ベクトルを求める観測移動ベクトル算出部(435)と、撮像部(2)の移動に起因する各特徴点に対応する物体の見かけの移動ベクトルの最小値を算出する最小見かけ移動ベクトル算出部(434)と、特徴点ごとに観測移動ベクトルから見かけの移動ベクトルの最小値を減じて補正移動ベクトルを算出する移動ベクトル補正部(436)と、その補正移動ベクトルに対応する物体が車両(10)に接近する移動物体か否か判定する判定部(437)とを有する。
(もっと読む)
画像処理装置、及び、その画像処理プログラム

【課題】同一色のベクターデータの重複時に、重複部分の画像の識別を可能にしながら色情報の変更範囲を最小限にした画像処理装置、及び、その画像処理プログラムを提供することにある。
【解決手段】描画開始座標情報と描画終了座標情報と色情報とを有する描画要素データの画像処理を行う画像処理装置において、第1描画要素データの第1の要素画像と、第2描画要素データとの第2の要素画像の重複を検出する重複検出手段と、前記色情報を比較して色の差分が所定量内か否かを判断する色判断手段と、前記色情報を変更する色情報変更手段と、を有し、前記色情報変更手段は、前記重複検出手段において重複が検出され、前記色判断手段において前記第1描画要素データの第1色情報と前記第2描画要素データの第2色情報の前記色の差分が所定量内と判断された場合、前記第1色情報と前記第2色情報のうち少なくとも1つの前記色情報を変更する。
(もっと読む)
顔検出方法
【課題】単独の検出器でも、隠れが生じている顔を高い検出率で検出することができる顔検出方法を提供する。
【解決手段】評価対象画像内に設定したROI内に複数の選択領域を設定する。そして、ROI内に画像が顔であるか否かを判定するための1つ以上の画素で構成される複数の特徴量領域を設定し、特徴量領域内の評価対象画像に対して所定の評価を行ってスコアを求める。そして、選択領域と特徴量領域との重なりの程度に応じてスコアを選択領域に按分し、これらの処理を複数の特徴量領域の全てにおいて実行する。その後、複数の特徴量領域において按分されたスコアを集計し、選択領域が顔であるか否かを判定し、複数の選択領域でそれぞれ顔であるか否かを判定した結果に応じてROIが顔であるか否かを判定する。
(もっと読む)
対象物検出装置、対象物検出方法
【課題】処理負荷を大きくすることなく、検出対象物が遠近離れて複数存在する場合の検出精度を高める。
【解決手段】入力画像に関する撮像対象までの距離情報を取得する距離情報取得部と、距離情報に基づいて、入力画像に対して距離区分を設定する距離区分設定部と、距離区分毎に、探索ウィンドウのサイズを設定するウィンドウサイズ設定部と、距離区分毎に、設定されたサイズの探索ウィンドウを用いて入力画像のスキャンを行なうスキャン部と、探索ウィンドウ内から検出対象物の検出処理を行なう検出処理部とを備えた対象物検出装置。
(もっと読む)
画像処理システム、画像処理装置、方法、プログラムおよび記録媒体
【課題】偏光カメラや撮影対象物、光源の位置関係に関わらず、偏光カメラの撮影画像に含まれる撮影対象物の検出精度を向上させる画像処理システム、画像処理装置、方法、プログラムおよび記録媒体を提供すること。
【解決手段】本発明の画像処理装置は、偏光カメラが生成した水平偏光画像および垂直偏光画像からこれらの画像の輝度情報および偏光度情報を生成し、当該輝度情報から形成されるモノクロ画像の粒状性情報を算出すると共に、当該偏光度情報から形成される偏光度画像の粒状性情報を算出する。そして、画像処理装置は、これらの輝度情報、偏光度情報および粒状性情報を使用して、偏光カメラが生成した画像に含まれる対象物を検出する。
(もっと読む)
駐車支援装置
【課題】駐車時の進行経路を予測する上で操舵角を検出するセンサを不要とし、センサ接続によるハーネス及び配線作業のコストを削減する。
【解決手段】カメラより画像を取得して2値化等の前処理を行い(S1,S2)、2値化した画像より前輪を検出する(S3)。そして、画像中の前輪の形状或いは輪郭と予めシステム内に記憶されている前輪のパターンとを照合し(S4)、パターン照合結果に基づいて操舵角を算出する(S5)。次に、操舵角に基づいて自車両の進行経路を推定し(S6)、予測進路軌跡のガイドラインを生成してディスプレイに表示する(S7)。これにより、舵角センサからの信号を用いることなく操舵角を認識して自車両の進行経路を推定することができ、舵角センサを接続するためのハーネスと配線作業に要するコストを削減しつつ、駐車時のドライバの運転操作を支援することができる。
(もっと読む)
カメラおよび画像処理プログラム
【課題】 画像データの適切な位置に挿入画像を挿入する。
【解決手段】 被写体の像を撮像して画像データを生成する撮像手段と、前記画像データに対する顔認識処理の結果に基づいて、前記画像データの画像における主要被写体の分布を示す分布情報を生成する認識手段と、前記分布情報と前記被写体のコントラスト情報とに基づいて、前記画像データに挿入画像を挿入する挿入位置を決定する決定手段とを備え、前記決定手段は、前記分布情報と前記コントラスト情報との重み付けを、前記主要被写体の前記被写体全体に対する面積比率に基づいて決定し、前記重み付けを加味して、前記分布情報と前記コントラスト情報とに基づく前記挿入位置を決定する。
(もっと読む)
立体物検知装置および立体物検知方法
【課題】静止物が接近物であるとの誤判定を低減することができる「立体物検知装置および立体物検知方法」を提供すること。
【解決手段】移動体に配置された単一の撮像手段2と、撮像手段2の撮像画像に基づいて、立体物の検出および当該立体物に対応する検出画像の作成を繰り返す立体物検出手段4と、最新の検出画像と前回の検出画像との差分面積に基づいて接近物判定を行う接近物判定手段6とを備え、接近物判定手段6は、差分面積が増加した場合であっても、このことのみを以て直ちに立体物が接近物であると判定せずに、移動体が移動中ではないこと、または、移動体が移動中であるが差分面積の変化量が閾値変化量以上ではないことが判明した上で接近物であると判定すること。
(もっと読む)
案内装置、案内方法、および、案内プログラム
【課題】目印対象物の認識精度を向上可能な案内装置、案内方法、および、案内プログラムを提供する。
【解決手段】目印対象物の画像認識に係る認識テンプレートと周辺画像とに基づいて画像認識を行い、周辺画像において目印対象物が認識できたか否かの判断に係る認識自信度を算出する。また、案内実施地点にて取得された周辺画像に基づく認識自信度と比較し、案内実施地点と案内地点との間にて取得された周辺画像に基づく認識自信度が向上したか否かを判断し、認識自信度が向上したと判断された場合(S120:YES)、案内実施地点にて取得された周辺画像に基づく目印対象物の画像を目印対象物の画像認識に係る新規テンプレートとして格納する(S121)。これにより、新規テンプレートに基づいて目印対象物を認識できる可能性が高まり、目印対象物の認識精度が向上する。
(もっと読む)
ユーザー認識支援システム
【目的】 通常の人の行動、特に老人などの視力や注意力が弱っている人の行動を支援するために、ユーザーが探しているターゲットを指し示すことができるポインティング装置を提供することを目的とする。
【構成】 検索キーを入力するための検索キー入力手段と、検索対象物を含む映像を撮り込むための撮像手段と、前記撮像手段により取り込まれた映像と前記検索キー入力手段から入力された検索キーとに基づいて、前記検索キーに対応する物体又は部分を検索する検索手段と、前記検索手段による検索結果と前記映像とに基づいて、レーザー光線の照射方向を算出する方向算出手段と、前記方向算出手段に基づいて、前記の対応する物体に向けて、レーザー光を照射するレーザー発生手段と、を含むものである。
(もっと読む)
撮像装置、撮像条件設定方法、プログラム
【課題】誤った識別結果が得られた場合であっても、正しい識別結果が得られる撮像条件を高速に設定できる撮像条件設定方法を提供すること。
【解決手段】対象物の識別に用いる画像の撮像条件を設定する撮像条件設定方法であって、画像を用いて対象物を識別する対象物識別工程S1−1と、対象物を識別可能な撮像条件の範囲である識別可能範囲を生成する識別可能範囲生成工程S1−3と、対象物が同一であると識別される撮像条件の範囲である同一識別結果範囲を生成する同一識別結果範囲生成工程S1−2と、撮像条件を変更する規程である撮像条件設定規程を識別可能範囲と同一識別結果範囲とを用いて生成する撮像条件設定規程生成工程S1−4と、撮像条件設定規程生成工程において生成された撮像条件設定規程を用いて対象物の識別が可能な撮像条件を設定する撮像条件設定工程S2−4を備える。
(もっと読む)
画像認識装置
【課題】歩行者検出のためのパターン認識の計算量を軽減できる、画像認識装置を提供すること。
【解決手段】自車両の進行方向に存在する立体物までの距離を測定する測距手段と、測距手段によって同一距離として探知された測距点の集まりを囲む検出枠45を、自車両と衝突するおそれのある障害物として検出する障害物検出手段と、検出枠45内の障害物に限ってテンプレートマッチングによる歩行者認識を、検出枠45の端位置を基準に設定された探索領域50内で実行することによって、歩行者を検出する歩行者検出手段とを備える、画像認識装置。
(もっと読む)
移動物体検出装置
【課題】日照変化に起因した誤検出を排除して正確な検出を行う。
【解決手段】動画を構成する第i番目の原画像P(i)を、格納部120に格納する。平均画像作成部130は、格納部140内の第(i−1)番目の平均画像A(i−1)と原画像P(i)との重みつき平均を求め、平均画像A(i)として格納部140に格納し、参照画像作成部135は、格納部145内の参照画像U(i−1)をU(i)に更新する。画像比較部は、画像P(i)と画像A(i−1)との比較および画像P(i)と画像U(i−1)との比較を画素ごとに行い、いずれも非類似とされた画素を前景画素(J=0)、他の画素を背景画素(J=1)と判定し、マスク画像Mを作成する。参照画像作成部135は、前景部分は更新せず、背景部分は平均画像A(i−1)との重みつき平均により更新して、参照画像U(i)を作成する。
(もっと読む)
画像処理装置、駐車制御システム、及び、画像処理方法
【課題】駐車スペースの周りに物体が存在しない場合にも駐車スペースを判定することができる技術を提供する。
【解決手段】画像処理装置は、車両の速度に関する情報と車外画像に含まれる車両の左右方向に略沿って延びる第1ラインを認識したタイミングとに基づいて、車両を駐車可能なスペースの有無を判定するため、車外画像に基づいて車両を駐車可能なスペースを判定することができる。
(もっと読む)
画像データの識別方法及び撮像装置、プログラム、及び記憶媒体
【課題】 個人認証に要する時間を短縮することが可能な撮像装置を提供する。
【解決手段】 複数のフレームの画像データに含まれる顔画像データに対して、個人の識別と表情の識別のいずれかの識別処理を行う画像データの識別方法において、顔検出手段が、前記画像データに含まれる顔画像データを検出する顔検出工程(S202)と、識別手段が、前記顔検出工程で検出された1つまたは複数の顔画像データに対して前記識別処理を行う識別工程(S207)とを有し、前記識別工程では、前記識別処理を行うフレームの画像データに含まれる顔画像データと同じ人物を示す、前のフレームの画像データに含まれる顔画像データについて、前記識別処理に成功した場合に、失敗した場合よりも、高い数値を与えるものであって、該数値の高いものから予め設けた上限に達する数までの顔画像データに対して前記識別処理を行う。
(もっと読む)
画像処理プログラム、記憶媒体、画像処理装置及び電子カメラ
【課題】画像に写り込んだ異物の影を除去する画像処理を行う場合の条件を適切に設定させることができる画像処理プログラム、記憶媒体、画像処理装置及び電子カメラを提供する。
【解決手段】画像処理を実行可能な画像処理装置が備える制御部により実行される画像処理プログラムであって、制御部に、オリジナル画像に写り込んだゴミNSを検出する検出ステップと、画像をモニタに表示された画像処理用画面60のイメージ領域62に表示させるとともに、影画像82を画像処理用画面60の影画像表示領域87に表示させる画像表示ステップと、オリジナル画像に対してゴミNSを除去するための画像処理を施す画像処理ステップと、を実行させる。
(もっと読む)
照明制御システム
【課題】比較的簡単な構成で、人の存在の有無の検知精度の向上と、人の存在の有無を検知する処理速度の向上とを両立可能な照明制御システムを提供する。
【解決手段】撮像デバイス1と該撮像デバイス1による画像を画像処理することにより人の存在を検知して検知信号を出力する画像処理部2とを備えた人検知センサ部5と、該人検知センサ部5からの検知信号に基づいて照明光を制御する制御部6とを有する照明制御システム10であり、画像処理部2は、上記画像の所定の範囲全体において人の存在を検知する第1の画像処理と、所定の範囲全体を複数の異なる特定の範囲に分割して当該特定の範囲ごとに人の存在を検知した回数を所定の時間の間において計数し、上記所定の時間の経過後は、上記所定の範囲全体よりも狭く、且つ上記計数された頻度が所定の頻度を超えた上記特定の範囲に対して人の存在を検知する第2の画像処理とを行う。
(もっと読む)
照明制御システム
【課題】撮像手段により撮像される所定範囲内の周期動作物体の有無にかかわらず、自動的に人体の検知精度を向上させることが可能な照明制御システムを提供する。
【解決手段】照明器具5と、所定範囲を撮像する撮像手段を具備する画像センサ1と、所定範囲内の人体の在否に基づいて照明器具5を制御する制御部2とを備える。制御部2は、複数の期間において画像センサ1により取得された各画像の差分画像群に繰り返し現れた物体を、周期的な動作をする周期動作物体と判定し、且つ、人体と判定せず、差分画像群に繰り返し現れた物体を周期動作物体と判定したのちに、画像センサ1により取得された画像の差分画像I30に基づいて所定範囲内の人体の在否を判定する。
(もっと読む)
画像処理装置、画像処理プログラムおよび撮像装置
【課題】画像に写り込んだゴミ影を効率よく正確に抽出する画像処理装置を提供する。
【解決手段】画像内の各部分における明るさを示す第1の明るさ値と、各部分の周辺における明るさを示す第2の明るさ値とを算出する明るさ算出部と、各部分における色相を示す第1の色相値と、各部分の周辺における色相を示す第2の色相値とを算出する色相値算出部と、第1の明るさ値と第2の明るさ値との差が予め定められた閾値以上であり、かつ、第1の色相値と第2の色相値との差が予め定められた閾値以上でない各部分からなる領域を抽出する領域抽出部と、を備えることを特徴とする画像処理装置である。
(もっと読む)
画像処理装置及びプログラム
【課題】画像関連処理を効率良く行って、処理の高速化を図る。
【解決手段】撮像装置100は、被写体の顔画像を含む画像データから顔画像を検出するとともに、検出された顔画像に関連する各種の顔関連情報を取得する顔検出部7と、顔関連情報と画像データを関連付けて記録する検出情報記憶部8と、処理実行部による画像関連処理の処理条件を指定する操作入力部6と、指定された処理条件に基づいて、顔関連情報と関連付けられた画像データを画像関連処理の処理対象として決定する処理実行部11とを備えている。
(もっと読む)
61 - 80 / 1,346
[ Back to top ]