
Fターム[5B057DA06]の内容
Fターム[5B057DA06]の下位に属するFターム
Fターム[5B057DA06]に分類される特許
101 - 120 / 1,346
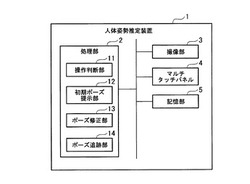
人体姿勢推定装置、人体姿勢推定方法およびコンピュータプログラム
【課題】人を撮像しながら実時間での人体姿勢推定処理を効率的に行うことを図る。
【解決手段】ビデオフレームに写っている人のポーズを推定し、推定したポーズに基づいて該ビデオフレームよりも後のビデオフレームのポーズを推定し、推定結果のポーズをビデオフレームの人物画像に重ね合わせて表示パネル上に表示する表示データを出力するポーズ追跡部14と、感知データに基づいてユーザがどのような所定の操作を行ったのかを判断する操作判断部11と、ポーズ修正開始の操作に応じて初期ポーズをビデオフレームの人物画像に重ね合わせて表示パネル上に表示する表示データを出力する初期ポーズ提示部12と、ポーズ修正操作に応じて初期ポーズを修正するポーズ修正部13と、を備え、ポーズ追跡部14は、該修正結果のポーズに基づいて、ポーズ修正開始の操作が行われた時刻以降のビデオフレームに対してポーズを推定する。
(もっと読む)
画像処理装置および画像処理方法

【課題】画像データに付加される顔情報が誤検出情報であるか否かを求めることができる画像処理装置および画像処理方法を提供する。
【解決手段】画像データに付加される撮影情報(被写体距離、レンズ焦点距離、画像高さの解像度およびデジタルズーム倍率)に基づいて画像データに人物の顔が含まれるときに人物の顔サイズとして取り得る値の範囲を示す有効顔サイズ範囲を求めた後、撮影情報とともに前記画像データに付加される顔情報で特定される顔サイズが、有効顔サイズ範囲の最大値Smaxよりも大きい、または有効顔サイズ範囲の最小値Sminよりも小さい場合、顔領域FRS、FRLは誤検出されたものであると認定する。
(もっと読む)
通行車両監視システム及び車両用監視カメラ
【課題】道路上の通行車両を正確に認識し、設置が容易で、かつ車両毎の走行状態の分析を負荷が集中することなく行うことができる通行車両監視システム及び車両用監視カメラを提供する。
【解決手段】通行車両監視システム1は、数珠繋ぎに接続され、車両の通行状況を撮像する複数の監視カメラ2と、その複数の監視カメラに接続されたセンタ装置4とからなる。 各監視カメラ2は、複数の撮像部21と、複数の画像から距離画像のデータを生成する立体計測部23と、距離画像に基づく基本監視部24と、メモリ27と、距離画像に基づいて認識された車両の識別情報を生成して、その識別情報と、その認識された車両についての時刻情報とを含む情報を前記記憶部に記録する計測及び記録処理部と、距離画像に基づいて、基本監視部とは別の監視処理を実行する追加監視部25を有する。
(もっと読む)
運転支援装置
【課題】車載カメラとして単眼カメラを備えた安価な構成により、従来よりコスト低減を図って、撮影カメラの撮影画像から将来の(その後の)TTCを正確に推定することができる車両支援装置を提供する。
【解決手段】車載カメラとしての単眼カメラ2により自車両1の周辺を撮影し、演算部3の近似手段により、単眼カメラ2の複数時点の撮影画像中の障害物の撮影倍率から衝突可能性の経時変化特性を近似し、演算部3の推定手段により、近似手段の近似結果に基づいて将来の衝突可能性を推定する。
(もっと読む)
障害物認識装置及び障害物認識方法
【課題】高い精度で障害物を認識することができる障害物認識装置を提供する。
【解決手段】本発明の一実施形態に係る障害物認識装置1は、電磁波を発信し、その反射波の反射出力に基づいて障害物を検出する第1の障害物検出手段11と、第1の障害物検出手段とは異なる方法で障害物を検出する第2の障害物検出手段12と、第2の障害物検出手段により検出された複数の障害物についてそれらの障害物の推定反射出力を合成した合成推定反射出力を算出する反射出力推定手段22と、合成推定反射出力と第1の障害物検出手段により計測された計測反射出力との比較結果を用いて障害物を認識する障害物統合認識手段24と、を備える。
(もっと読む)
画像処理装置及びその処理方法
【課題】 印刷ジョブに対して異なる色変換処理を設定し、オブジェクトに適した処理を行う。
【解決手段】 グラデーションオブジェクトに応じたデータ群にカラーマッチング処理を行い、カラーマッチングの結果に基づき、そのデータ群に対する色の変化傾向を検出し、そのデータ群から中間のピクセルを補間演算により求める。そして、中間のピクセルの値が変化傾向に従って単調に増加或いは減少していない場合に、ピクセルの値を変化傾向に従って補正する。
(もっと読む)
画像処理装置、その処理方法及びプログラム
【課題】対象物の検出精度を向上させる技術を提供する。
【解決手段】画像処理装置は、検出すべき対象物を含む画像から輝度情報に基づいて第1の特徴量を取得する第1の特徴量取得手段と、第1の特徴量に基づいて画像から領域を検出するとともに、当該領域における対象物に対する尤度を算出する尤度算出手段と、算出された尤度が第1の閾値以上である領域を対象物が存在する対象物領域として検出するとともに、算出された尤度が第1の閾値未満で且つ第2の閾値以上である領域を対象物が存在する可能性のある候補領域として検出する第1の検出手段と、候補領域について第1の特徴量とは異なる第2の特徴量を取得する第2の特徴量取得手段と、第2の特徴量の値に基づいて各候補領域の尤度を補正する補正手段と、補正された尤度が第1の閾値と第2の閾値との間の値を持つ第3の閾値以上となる候補領域を対象物領域として検出する第2の検出手段とを具備する。
(もっと読む)
映像解析方法およびシステム
【課題】歩行者を時系列的に撮像することにより、該歩行者を的確に分類する。
【解決手段】映像シーケンスの特徴を分類する方法は、前記映像シーケンスのフレームの、前記特徴を含んでいる対象領域を選択すること、前記対象領域を複数のセルに分割すること、前記セルによりオプティックフローのヒストグラムを計算すること、セル対についての前記オプティックフローのヒストグラムを比較すること、前記比較の結果の少なくとも一部に基づいて前記特徴をクラスに割り当てること、を含む。
(もっと読む)
画像処理装置および画像処理方法
【課題】入力画像内に画像処理の対象となる複数のオブジェクトが規則的に配置されているようなワークに対して、適切な計測処理を行うことができる画像処理装置および画像処理方法を提供する。
【解決手段】複数の処理対象領域の各々に対して実行される共通の画像処理に係る設定を受付け、入力画像に対して複数の処理対象領域を規定するための基準領域の設定を受付け、基準領域を基準として、複数の処理対象領域を規則的に規定するための設定を受付ける。共通の画像処理に係る設定に従って、複数の処理対象領域の各々に対して画像処理を実行し、複数の処理対象領域に対するそれぞれの画像処理の結果を反映した全体処理結果を出力する。
(もっと読む)
不審対象検知システム、不審対象検知装置、不審対象検知方法及びプログラム
【課題】異なる特性を有する画像処理方法の結果を統合的に利用し、特にセキュリティレベルに応じた有効な不審者検知処理を行なうことができる不審者検知システムを提供することにある。
【解決手段】実施形態によれば、不審者検知システムは、監視範囲内の監視対象を撮影する複数のカメラと、前記各カメラから出力される映像を画像処理する手段であって、異なる検出特性を有する複数の画像処理部と、前記各画像処理部からの画像処理結果のいずれか、あるいは当該各画像処理結果を統合した統合処理結果を使用して前記監視対象の挙動を検知する検知部と、前記検知部から出力される挙動情報に基づいて、前記監視対象が不審者であるか否かを判定する判定部とを具備し、前記複数の画像処理部は、前記各カメラから出力される映像を単眼画像処理する単眼画像処理部と、前記各カメラから出力される映像をステレオ画像処理するステレオ画像処理部とを含む構成である。
(もっと読む)
放射線撮影装置、放射線撮影システム、画像処理装置及びプログラム
【課題】逆コンプトン散乱により放射線を照射する放射線源を用いた場合でも良好なエネルギーサブトラクション画像を得ることができる放射線撮影装置、放射線撮影システム、画像処理装置及びプログラムを提供する。
【解決手段】撮影された高エネルギーの放射線による放射線画像及び低エネルギーの放射線による放射線画像を対応する画素毎に、放射線源から照射される放射線の中心位置からの距離に応じて重み付けを変え、高エネルギーの放射線による放射線画像の重み付けを小さくして高エネルギーの放射線による放射線画像から低エネルギーの放射線による放射線画像を減算する重み付け演算を行って軟部画像を生成する。
(もっと読む)
後方認識装置
【課題】コストを低減できる簡単で安価な画像処理により、撮影手段の後方の撮影画像から、路面ペイント部分が存在していても、自車の後方の路面と車両とを容易に判断して認識できるようにする。
【解決手段】車載カメラ3により、走行する自車1の後方の路面を含む領域を撮影し、その各時刻の撮影両像を射影変換部61により射影変換画像(上面視画像)に変換する。さらに、領域設定部62、記憶部4により、撮影画像の下端から現れた前記射影変換画像における特徴を記憶し、推定部63により、白車速に基づいて所定時間後の前記射影変換画像での前記特徴の位置を推定する。そして、認識部66により、推定された前記所定時間後の位置における前記特徴と記憶された前記特徴との一致度合いに基づいて、前記一致度合いが所定以上の路面部分が路面ペイント部分を含む路面部分であると判断する。
(もっと読む)
ワードスポッティング読唇装置及び方法
【課題】スポッティング認識技術を、音声情報ではなく画像情報に適用して、これまで読唇技術で対象とされていなかった文章の発話シーンを対象とし、文章の中からキーワードを認識するワードスポッティング読唇を行う。
【解決手段】撮像手段1は、少なくとも口唇領域を含む顔画像を取得する。領域抽出手段2は取得顔画像から口唇領域を抽出する。特徴量計測手段3は抽出された口唇領域より形状特徴量を計測する。キーワードDB4には、計測されたキーワード発話シーンの特徴量を登録する。判断手段5は計測された特徴量と登録されているキーワードDBの特徴量を比較し、口唇の発話内容を判断する。結果表示手段6は、利用者に表示する表示装置である。
(もっと読む)
ジェスチャ認識装置及び方法
【課題】指を用いる場合でもまた腕を用いる場合でもその動きによるジェスチャを的確に認識できるようにする。
【解決手段】カメラ4から取り込んだ画像フレームからジェスチャにより描画された図形の輝点位置座標を検出し、この輝点位置座標が画像フレーム中の第1のエリアEaと第2のエリアEcのいずれに含まれるかを判定する。そして、輝点位置座標が第1のエリアEaに含まれる場合にはフィンガジェスチャモードを設定し、第2のエリアEcに含まれる場合にはカメラトラッキングモードを設定する。フィンガジェスチャモードでは、画像データをもとにフィンガジェスチャによる図形を認識する。一方、カメラトラッキングモードでは、パン・チルト駆動ユニット5によりカメラ4のパン・チルト角を制御してカメラ4の撮像方向をユーザの腕の動きに追従させ、この追従軌跡をもとに図形を認識する。
(もっと読む)
情報処理装置、情報処理方法、およびプログラム
【課題】識別対象画像の被写体が登録済みの被写体のいずれであるかを判別する際の精度を向上させる。
【解決手段】輝度レベル飽和処理部21は、登録用元画像に対して、露出過多で撮像された状態を再現するための画像処理を行うことにより登録用画像を生成する。反対に、輝度レベル間引き処理部22は、登録用元画像に対して、露出不足で撮像された状態を再現するための画像処理を行うことにより登録用画像を生成する。本発明は、顔判別などの画像識別装置に適用できる。
(もっと読む)
車載カメラを用いた測距装置
【課題】単一の車載カメラによって取得される撮像画像を基に、車両の外部の移動体と自車両との間の距離を測定することできる測距装置を提供する。
【解決手段】車載カメラ2により異なる時刻で取得された第1撮像画像と第2撮像画像のうちの第1撮像画像において、移動体Mの路面に対する接地点Pに対応する画像上移動体接地点P1を特定し、車両との間の距離が移動体Mの接地点Pと同一の距離となる静止点Qに対応する第1撮像画像上の点Q1と第2撮像画像上点Q2とを第1撮像画像及び第2撮像画像から抽出する。抽出した点Q1,Q2を用いて、モーションステレオの手法によって、静止点Qと車両との間の距離と算出し、算出した距離を移動体Mと車両との間の距離として決定する。
(もっと読む)
画像処理装置
【構成】フラッシュメモリ40は複数の物体をそれぞれ表しかつ互いに異なる態様で変形された複数の辞書画像を保持し、CPU30は、複数の変形態様の各々に対応して指定画像を変形し、変形処理に係る変形態様に対応する辞書画像を保持された複数の辞書画像の中から選択する。CPU30はまた、選択された辞書画像に符合する部分画像を作成された変形画像から探索し、発見された部分画像に注目して既定処理を実行する。
【効果】探索性能が向上する。
(もっと読む)
車載警告装置
【課題】後続車両の急接近を自車両の運転者が気付いていないという状況をその運転者に的確に警告できる車載警告装置を提供すること。
【解決手段】リアカメラで自車両後方を撮像する(S11)。後方画像に含まれる後続車両の画像を抽出する(S12)。後続車両の画像の面積を算出する(S13)。その面積の時間変化の度合いAを算出する(S14)。変化度合いAが閾値A0より大きいか否かを判断する(S15)。大きい場合には(S15:YES)、最新の後続車両の画像の面積S1を算出する(S16)。面積S1が閾値S0より大きいか否かを判断する(S17)。大きい場合には(S17:YES)、車間距離が短い状態であるとして、その状態が5秒継続したか否かを判断する(S18、S19)。5秒継続した場合に(S19:YES)、運転者が後続車両の急接近に気付いていないとして、警告を行う(S20)。
(もっと読む)
画像監視装置
【課題】被害者が強盗に手を縛られる身柄拘束行為を検出し、通報する画像監視装置を提供する。
【解決手段】本発明にかかる画像監視装置は、撮像部により取得された入力画像に、強盗と被害者に対応した人物領域を抽出する人物領域抽出手段と、人物領域のうち強盗犯と被害者に挟まれ、両者の腕が伸びている部分を接触領域として抽出する接触領域抽出手段と、接触領域における画素値の時間変化から、身柄拘束行為を判定する異常判定手段を有する。
(もっと読む)
位置姿勢決定方法、位置姿勢決定装置、物体モデル生成方法、物体モデル生成装置、およびプログラム
【課題】画像内の3次元物体の姿勢変動およびサイズの変動に対してロバストに識別する。
【解決手段】対象物体に対応するモデルの特徴点の特徴量とモデルに定められた3次元座標の原点から特徴点への3次元方向ベクトルとにより記述される物体モデルを入力するモデル入力工程と、対象物体を撮像した画像を取得する取得工程と、特徴量に基づいて、物体の特徴点の、画像上における2次元特徴点の位置を検出する検出工程と、物体モデルの位置および姿勢を変更する変更工程と、変更された各位置および姿勢における物体モデルの特徴点および3次元座標の原点を投影特徴点および投影原点として画像上に投影する投影工程と、投影原点から2次元特徴点への第1方向ベクトルと投影原点から投影特徴点への第2方向ベクトルとの一致度を算出する算出工程と、算出された各特徴点についての一致度に基づく評価値が最大となる物体モデルの位置および姿勢を対象物体の位置姿勢として決定する決定工程とを有する。
(もっと読む)
101 - 120 / 1,346
[ Back to top ]