
Fターム[5B057DA06]の内容
Fターム[5B057DA06]の下位に属するFターム
Fターム[5B057DA06]に分類される特許
121 - 140 / 1,346
位置姿勢決定方法、位置姿勢決定装置、物体モデル生成方法、物体モデル生成装置、およびプログラム
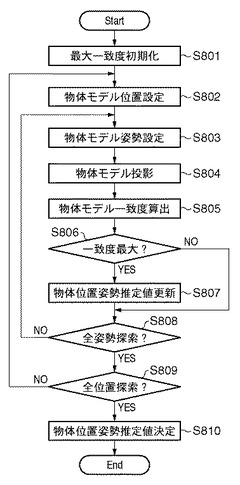
【課題】画像内の3次元物体の姿勢変動およびサイズの変動に対してロバストに識別する。
【解決手段】対象物体に対応するモデルの特徴点の特徴量とモデルに定められた3次元座標の原点から特徴点への3次元方向ベクトルとにより記述される物体モデルを入力するモデル入力工程と、対象物体を撮像した画像を取得する取得工程と、特徴量に基づいて、物体の特徴点の、画像上における2次元特徴点の位置を検出する検出工程と、物体モデルの位置および姿勢を変更する変更工程と、変更された各位置および姿勢における物体モデルの特徴点および3次元座標の原点を投影特徴点および投影原点として画像上に投影する投影工程と、投影原点から2次元特徴点への第1方向ベクトルと投影原点から投影特徴点への第2方向ベクトルとの一致度を算出する算出工程と、算出された各特徴点についての一致度に基づく評価値が最大となる物体モデルの位置および姿勢を対象物体の位置姿勢として決定する決定工程とを有する。
(もっと読む)
移動物予測装置及びプログラム

【課題】移動物の将来の位置分布形状が複雑な形状であっても、計算量の増大を抑制することができるようにする。
【解決手段】領域分割部42によって、走路区分の領域及び静止物の領域に応じて領域を分割した領域分割マップを生成する。分岐ノード生成部44によって、領域境界上に分岐ノードを生成する。移動物生成部46によって、移動物の位置分布を、速度分布と共に記録する。領域分割マップにおいて移動物の位置分布に近傍に分岐ノードが存在する場合、移動物分割部52によって、分岐ノードの分岐すべき方向の数だけ、移動物の位置分布を生成すると共に、分岐ノードが存在する境界で隣接する領域の進入可能性に基づいて、各分岐すべき方向の分岐割合を算出し、移動物の位置分布に対して、分岐割合に応じた重み付けを行うと共に、対応する速度分布の各々を、各分岐すべき方向に応じて変更する。位置更新部48によって、移動物の位置分布を更新する。
(もっと読む)
撮像装置
【課題】複数の異なる時点の画像を用いて培養容器内における培養液中の細胞の浮遊状態、付着状態を精度よく判別することが可能な撮像装置を提供する。
【解決手段】撮像装置1は、細胞と培養液とが入った培養容器Sを把持する容器把持部32と、容器把持部32が設けられた揺動部60と、揺動部60に振動を与える加振部50と、培養容器S内の細胞を画像として撮像する撮像部10と、撮像部10が撮像した少なくとも一の振動中の画像を含む複数の撮像場所の画像を用いて、撮像場所が異なることにより生じる画像間の位置ずれを補正する画像補正部4と、撮像部10が撮像した画像と画像補正部4が補正した画像とを用いて細胞の浮遊状態または付着状態を判別する画像処理部5と、を備える。その結果、付着状態の細胞を浮遊状態であると誤って判別することが防止され、細胞の局部的に付着している状態と完全に付着している状態とが区別される。
(もっと読む)
運転支援装置
【課題】障害物画像および走行予想進路を視認しやすく表示することができる運転支援装置を提供する。
【解決手段】車両後方表示装置10は、ソナー17が障害物20を検出した場合には、進路画像29の表示を停止し、障害物20を検出したことを示す障害物画像30を撮影画像23aに重畳して表示するように演算装置16および描画装置13によってディスプレイ12が制御される。障害物20を検出した場合には、進路画像29を非表示にすることによって走行予想進路がわからなくなるが、車両の進行を妨げる障害物20がある場合には、進路画像29を表示する必要性が低いので、障害物20を検出したことの方が進路画像29を表示することよりも優先すべき事項である。このように優先すべき障害物画像30を表示することによって、障害物画像30を視認しやすくすることができる。
(もっと読む)
白線検出装置
【課題】本発明は、白線のエッジ抽出の際の閾値の決定手段を不要とし、処理を簡素化して、白線両端に生じるエッジを路面の模様、影、照明などの影響を極力排除し、信頼性高く抽出することができる白線検出装置を提供することを目的としている。
【解決手段】この発明は、白線のエッジか否かの判定対象である画素とこの画素から走査線方向に1〜K画素隣の画素との輝度の差分を算出する第1〜第Kの差分算出手段と、この第1〜第Kの差分算出手段により算出された差分が予め設定された閾値以上か否かを判定する第1〜第Kの閾値判定手段とを備え、この第1〜第Kの閾値判定手段の少なくともいずれか1つにより差分が閾値以上と判定されることを第1の条件とし、この第1の条件が満たされた場合に、判定対象である画素を白線のエッジとすることを特徴とする。
(もっと読む)
衛星システム及び対象天体特徴取得方法
【課題】 未知の惑星等の対象天体の位置や3次元形状が高精度、かつ、高速に取得することができるようにする。
【解決手段】 衛星側に配置されて、対象天体の撮影画像における特徴情報を所定数抽出して送信する特徴情報取得ユニット4と、地上側に配置されて、特徴情報取得ユニット4からの特徴情報を受信して蓄積し、蓄積した特徴情報に基づき所定の画像処理及び演算処理を行う情報処理ユニット6とを備える。
(もっと読む)
パンタグラフ検出装置及びその方法
【課題】特に精度を保ったまま検出計算を高速に行えるようにすることにある。
【解決手段】 列車1が通過する線路2の上方に、パンタグラフ検出センサ40及び監視カメラ30を設置し、パンタグラフ検出センサ40がパンタグラフ1aを検出した際に監視カメラ30によりパンタグラフ1aの撮影を行い、画像処理装置50が入力画像に対して、粗くサンプリングされた候補点探索画素を大まかに探索し、パンタグラフの大体の位置を特定した後、特定された位置の近傍領域をわずかに再探索することにより正確な位置を求める。
(もっと読む)
車両の周辺監視装置
【課題】車両の周辺監視装置に関わり、同期回路を必要とせず、複数の検出手段の検出タイミングを調整する。
【解決手段】車両の周辺の物体情報を所定周期で連続して検出する第1検出手段と、第1検出手段とは異なる方法で、車両の周辺の物体情報を所定のタイミング毎に検出する第2検出手段と、第1検出手段が1周期内に検出した物体情報の検出タイミングを当該1周期内の1つのタイミングとして補正する時間補正手段とを備え、その1周期内の1つのタイミングは、第2検出手段の所定のタイミングの1つと一致させる。
(もっと読む)
画像検出装置及び画像検出方法
【課題】入力された画像データからHDR画像群を検出することのできる技術を提供する。
【解決手段】本発明の画像検出装置は、入力された画像データのフレーム毎に、そのフレームを代表する代表輝度値を算出する代表輝度値算出手段と、算出された代表輝度値のフレーム間の変化に周期性があるか否かを判断する周期判断手段と、代表輝度値のフレーム間の変化に周期性があると判断された場合に、1周期内の代表輝度値の変化に基づいて、入力された画像データから異なる露出で同一の被写体を撮影することにより得られた複数の画像であるHDR画像群を検出するHDR検出手段と、を有し、HDR検出手段は、1周期内の代表輝度値の最大値と最小値の差分の絶対値を算出し、該差分の絶対値が第1の閾値以上である場合に、対応する周期内の複数のフレームがHDR画像群のフレームであると判定する。
(もっと読む)
ユーザ端末装置及びショッピングシステム
【課題】手操作を伴うことなく、購入対象や通過対象ゲートを特定できるとともに本人認証をより確実に行うことができるユーザ端末装置及びショッピングシステムを提供する。
【解決手段】眼鏡型のユーザ端末装置1は、利用者が見ている視界を撮像する視界同調カメラ9と、利用者の眼を撮像する利用者撮像手段(注視対象距離検出部10及び視線検知部24)とを備える。ユーザ端末装置1は、視界の画像情報と利用者の眼の画像情報とに基づいて注視対象を検出し、注視対象の画像情報に基づいて購入対象を特定し、利用者の眼の画像情報に基づいて本人か否かを確認する。
(もっと読む)
特定部位抽出プログラム
【課題】環境条件によらず、車両の色を判別すべき部位を正確に抽出すること。
【解決手段】画像蓄積サーバ100は、画像データ管理部110が、白黒画像データおよびカラー画像データを取得し、取得した各画像データを特定部位抽出処理部120に渡し、特定部位抽出処理部120が、カラー画像上の車両の特徴的な部分(ナンバープレート、サイドミラー、フロントミラー、ヘッドランプ等)を検出し、検出した部分を基にして車両の特定の部位(ボンネット領域、ルーフ領域、車両側面とドア領域、トランク領域等)を検出する。
(もっと読む)
電子機器及び動画像再生方法
【課題】思いがけない静止画像等を含む動画をユーザに提示することができる電子機器を実現する。
【解決手段】実施形態によれば、インデキシング手段は、複数の静止画像を分析し、前記複数の静止画像それぞれの属性を示すインデックス情報であって前記複数の静止画像に含まれる複数の顔画像の認識結果を含むインデックス情報を生成する。抽出手段は、前記インデックス情報に基づいて、選択された人物の顔画像をそれぞれ含む第1の静止画像群と、前記選択された人物に関連する第2の静止画像群であって前記選択された人物に関連する別の人物の顔画像を含む静止画像を少なくとも含む第2の静止画像群とを、前記複数の静止画像から抽出する。再生手段は、前記抽出された第1の静止画像群と前記抽出された第2の静止画像群とを用いて動画像を再生する。
(もっと読む)
駐車支援装置
【課題】ドライバーが通常の運転操作には用いない入力手段を介することなく高い自由度を持って駐車目標位置を簡単に設定可能な駐車支援装置を提供する。
【解決手段】車両90を駐車可能な駐車可能領域Gを、車両90の左右の少なくとも一方の側において複数箇所検出可能な領域検出部を有し、駐車可能領域Gを含み、車両90の周辺の情景が撮影された撮影画像をモニタ装置に表示させると共に、領域検出部により検出された駐車可能領域Gが撮影画像上において対応する全ての位置に駐車目標候補Hを示すグラフィック画像を重畳させ、車両90の運転装置51からの指示入力に基づいて駐車目標候補Hの内の1つを駐車目標Tとして選択可能とする。
(もっと読む)
移動体検出装置及び移動体検出方法
【課題】あらゆる方向に移動する移動体をより確実に検出することができる移動体検出装置を提供する。
【解決手段】車両に搭載したカメラによって撮影されたカメラ画像を取りみ、画像の複数点Pの動きベクトルを生成する動きベクトル生成部と、点Pの動きベクトルの傾きを自車移動パラメータの回転成分で補正したとき、点Pから消失点への傾きと等しいとして自車移動パラメータの回転成分(Rx,Ry,Rz)を推定する自車移動パラメータ推定部と、画像内の任意の点Qの動きベクトルの傾きを自車移動パラメータの回転成分を用いて補正し、補正後の動きベクトルの傾きと、任意の点Qと消失点を結ぶ線との傾きを比較し、一致度が低いときに自車移動方向と異なる方向を持つ移動体として検出する移動体判定部と、を具備する。
(もっと読む)
車両用周辺監視装置
【課題】車両周辺を撮影した複数の画像を合成して、車両周辺の状況を俯瞰する俯瞰画像を生成すると、障害物が歪んで表示される。
【解決手段】撮影手段30の撮影範囲に向けて設置された障害物検出手段40の出力のうち、所定値を下回る最小の値に対応する位置よりも車両に近い領域は、撮影手段30で撮影した画像を第1仮想画像生成手段50によって、車両を上空の仮想視点から見下ろした第1仮想画像に変換し、障害物検出手段40の出力のうち、所定値を下回る最小の値に対応する位置よりも車両から遠い領域は、撮影手段30で撮影した画像を第2仮想画像生成手段60によって、第1仮想画像と連続する第2仮想画像に変換し、第1画像合成手段90によって、第1仮想画像と第2仮想画像とを合成して、画像表示手段100に表示する。
(もっと読む)
車両周辺監視装置
【課題】オプティカルフローによる画像処理を用いることなく、撮影画像から移動物体を検出し、その移動物体の存在を運転者が容易に気づくことができる車両周辺監視装置を提供する。
【解決手段】自車両に搭載され、自車両外部の周辺を撮影する撮影装置と、撮影装置にて撮影された撮影画像における検出ラインを設定し、検出ラインに沿って移動する移動物体の移動に伴って生じる検出ライン上の画素の明るさの変化を検出する検出手段と、検出手段により検出された結果に応じて、情報表示を生成する生成手段とを有する制御装置と、撮影画像及び情報表示を表示する表示装置とを備える車両周辺監視装置。
(もっと読む)
前方領域検出装置及び車両制御装置
【課題】他車両の灯火か路側物からの反射光かを精度良く判別して、前照灯の照射方向などの好適な自車両の制御を行うことができる前方領域検出装置及び車両制御装置を提供すること。
【解決手段】画像を無限遠点を通る区分ラインで左右に区分し、左領域では画素の輝度の判別のための閾値を高くし、右領域ではその閾値を小さくする。そして、ステップ100では、前方カメラ1から撮影した画像の各画素のデータを入力する。ステップ110では、各画素のデータが、画像の左領域のデータか右領域のデータかを判別する。ステップ120では、左領域のデータであるので、その明るさの値が(右領域の閾値Bより大きな)閾値A以上か否かを判定する。一方、ステップ140では、右領域のデータであるので、その明るさの値が、(左領域の閾値Aより小さな)閾値B以上か否かを判定する。
(もっと読む)
電子フォトフレームおよび電子フォトフレームシステム
【課題】電子機器が動作している際に、ユーザが一時的に電子フォトフレームを見た場合に、ユーザが電子フォトフレームを見たことに応じて電子機器を適切に動作させることが可能な電子フォトフレームを提供する。
【解決手段】このデジタルフォトフレーム(電子フォトフレーム)1は、DVDプレーヤ3に対して所定の動作を行わせる制御信号を送信可能な状態で接続される通信部16と、ユーザの顔を撮像することが可能な撮像部14と、撮像部14により撮像されたユーザの顔の画像に基づいてユーザがデジタルフォトフレーム1を見ていると判断した場合に、通信部16を介してDVDプレーヤ3に対して制御信号を送信するように制御する制御部19とを備える。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】画像内の被写体の種別の認識精度を向上できるようにする。
【解決手段】距離検出部32は、画像取得部31により取得された画像内に撮像されている被写体の、画像の撮像時の撮像機器からの距離の情報を、画像の画素単位で取得する。物体認識部36の領域分割部41は、画像、および距離情報に基づいて、画像における被写体となる前景領域と、それ以外の背景領域とに領域を分割する。背景影響低減特徴量抽出部42は、画像、距離情報、および分割された背景領域の情報の全て、またはそのいずれかに基づいて、背景による被写体の種別の認識に対する影響を低減する特徴量を抽出する。認識処理部43は、抽出された特徴量に基づいて、画像における前景となる被写体の種別を認識する。本発明は、画像処理装置に適用することができる。
(もっと読む)
歩行者検出装置
【課題】カメラによって取得した画像から歩行者を正確に検出しつつ、かつ当該歩行者を検出するための演算量を低減する高精度および高効率な歩行者検出装置を提供する。
【解決手段】本発明は、車両に搭載される歩行者検出装置であって、車両周辺の画像を取得する画像取得手段と、画像取得手段によって取得された画像から歩行者を探索する探索密度について、当該画像領域内で探索密度を一定とする探索密度一定モードと、当該画像領域内のうち、探索密度が高い第1領域と探索密度が低い第2領域とを設定する探索密度重点モードとのいずれかの探索密度モードを、道路状況に応じて設定する探索密度モード設定手段と、探索密度モード設定手段によって設定された探索密度モードに基づいて、画像取得手段によって取得された画像から歩行者を探索する歩行者探索手段と、歩行者探索手段によって探索された結果を通知する結果通知手段とを備える。
(もっと読む)
121 - 140 / 1,346
[ Back to top ]