
Fターム[5B057DA06]の内容
Fターム[5B057DA06]の下位に属するFターム
Fターム[5B057DA06]に分類される特許
1 - 20 / 1,346
待ち行列管理装置、待ち行列管理方法および、待ち行列管理システム
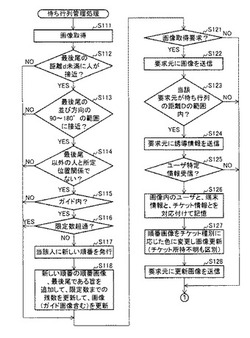
【課題】待ち行列を管理すること。
【解決手段】待ち行列管理装置によって、所定のサービスの提供を受けるための待ち行列が形成される領域の画像が取得され(ステップS111)、取得された画像に撮影されている待ち行列を形成しているそれぞれの人に発行された待ち行列の順番を特定可能な順番特定情報が、当該順番特定情報で特定される順番が対応している人をそれぞれ特定可能な態様で、当該画像に追加され(ステップS118)、順番特定情報が追加された画像が、端末装置に送信される(ステップS122)。
(もっと読む)
姿勢推定装置、姿勢推定方法及びプログラム

【課題】高速かつ高精度に初期姿勢を推定すること。
【解決手段】姿勢推定装置は、第1対象物と第1対象物に近接する第2対象物とを撮影する撮影手段と、第1対象物の構成要素と、第2対象物の構成要素と、第1及び第2対象物の構成要素間で接触している確率と、が複数組、対応付けられた接触情報を予め記憶する記憶手段と、撮影された第1及び第2対象物を含む撮影画像と、記憶手段により記憶された接触情報と、に基づいて、確率の高い順で、第1対象物の構成要素と、第2対象物の構成要素との接触を検出する接触検出手段と、接触検出手段により検出された第1及び第2対象物の位置と、複数のリンクを相互に接続して第1対象物を表現した簡易モデルと、に基づいて、第1対象物の初期姿勢を算出し、算出した初期姿勢と、簡易モデルを第1対象物の形状により近似した詳細モデルと、に基づいて、最終的な第1対象物の初期姿勢を推定する推定手段と、を備える。
(もっと読む)
評価値算出装置及び評価値算出方法
【課題】移動方向が互いにことなる複数の移動体をセンシング対象とする場合でも、センサ設置位置を精度良く評価できる評価値算出装置及び評価値算出方法を提供すること。
【解決手段】評価値算出装置100において、評価値算出部104は、設置位置候補と、センサの、センシング対象(ここでは、移動体)の移動パラメータに対する精度特性と、センサのセンシング対象領域(ここでは、監視対象領域)における交通事象パターンとに基づいて、センシング対象領域を構成する複数の領域要素にそれぞれ対応する複数の要素単位精度劣化値を算出する。そして、交通事象パターンは、複数の領域要素と各領域要素を起点とする交通事象ベクトルとから構成される。
(もっと読む)
運転支援装置
【課題】車輪の縁石への接触もしくは側溝への脱輪の発生するおそれがある場合の警告にステアリングの操舵力制御を用いることで、車輪の縁石への接触や側溝への脱輪を効果的に抑制する。
【解決手段】撮像手段13、14と、障害物検出手段15と、距離算出手段16とを備えた運転支援装置12において、車輪速検出手段19と、操舵角検出手段20と、操舵制御手段21と、検出された車輪速と検出された操舵角とから車輪の進路を予測する進路予測手段22と、縁石または側溝が検出された場合、予測された車輪の進路と算出された縁石または側溝と車輪との距離とに基づいて車輪が縁石または側溝に予め設定された時間内に到達するかどうかを判定する判定手段23と、車輪が縁石または側溝に予め設定された時間内に到達すると判定された時には操舵反力を大きくする制御装置18とを備えることを特徴とする。
(もっと読む)
写真画像毎の再生時間を最適化する画像再生装置、プログラム及び方法
【課題】写真画像に写る被写体の内容に応じて、閲覧者にとって最適な再生時間で写真画像を再生することができる画像再生装置、プログラム及び方法を提供する。
【解決手段】写真画像から特徴量を抽出し、閲覧者による注視領域と、その注視領域数NHとを検出する注視領域検出手段と、注視領域全ての面積を注視領域数NHで除算した平均注視領域サイズを算出し、画像領域サイズに対する平均注視領域サイズの注視領域割合値RHとを算出する第1のパラメータ算出手段と、注視領域数NH/注視領域割合値RHに基づく第1の延長再生時間t1を算出する第1の延長再生時間算出手段と、画像の基準再生時間t0に延長再生時間t1を加減算した再生時間tを算出する再生時間算出手段と、画像毎に、再生時間tを蓄積する画像蓄積手段とを有し、画像を、再生時間tだけディスプレイに表示するように再生させる。
(もっと読む)
移動体検出装置、コンピュータプログラム及び移動体検出方法
【課題】高い精度で移動体を検出することができる移動体検出装置、コンピュータプログラム及び移動体検出方法を提供する。
【解決手段】特徴点抽出部103は、撮像画像の各画素の画素値に基づいて複数の特徴点を抽出する。候補点特定部104は、抽出された特徴点から車両の所定部位の候補点を1又は複数特定する。透視投影変換部105は、特定された候補点を、透視投影変換行列を用いて3次元座標空間に逆投影する。3次元モデル配置部106は、逆投影された候補点に整合させて3次元モデルを配置する。透視投影変換部105は、配置された3次元モデルを撮像画像に投影する。移動体検出部107は、撮像画像へ投影された3次元モデルにより画定される領域内に含まれる特徴点の数に基づいて、車両を検出する。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】所望の計測部分の幾何的な物理量を選択的にかつ容易に取得することが可能な画像処理装置および画像処理プログラムを提供する。
【解決手段】対象物画像データに基づいて対象物画像OIが表示されるとともに、指定画像データに基づいて対象物画像の特定部分に対応する計測部分指定画像AIが表示される。使用者による操作部の操作により、表示される計測部分指定画像AIが対象物画像OIに相対的に移動される。計測部分指定画像AIが対象物画像OIの特定部分に移動された場合、その特定部分に対応するように予め設定された計測対象物の計測部分の物理量が計測される。
(もっと読む)
挿通孔の閉塞率評価システム、閉塞率評価方法及び閉塞率評価プログラム
【課題】蒸気発生器の挿通孔の閉塞率を容易に把握することができる閉塞率評価システム、閉塞率評価方法及び閉塞率評価プログラムを提供する。
【解決手段】本発明の挿通孔の閉塞率評価システムは、伝熱管と、伝熱管を通すための挿通孔が形成された管支持板とを備え、挿通孔が伝熱管が挿入された際にその周方向に形成される複数の隙間部を有する熱交換器に適用され、管支持板は長軸と短軸との比率が1.0以上2.0以下となる範囲内で3次元で楕円形状の模式図で表示され、各々の管支持板は重ならないように直列に配置され、3次元の楕円形状で表示した模式図を挿通孔の閉塞率を調査して得られた挿通孔の閉塞率の値に応じて色分けして表示する可視化処理を有することを特徴とする。
(もっと読む)
通信装置、及びその通信システム
【課題】より適切にコンテンツデータを通信することができる通信装置、及びその通信システムを提供する。
【解決手段】通信装置100は、所定の規格に基づく通信プロトコルを処理する通信プロトコル処理部130と、前記通信プロトコル処理部の制御を受けてデータ送信先装置との通信処理を実行する通信部171とを備える。通信プロトコル処理部130は、通信プロトコルで定義される送信コマンドに自装置の機種特定情報511を所定の規格の拡張情報として含ませる。
(もっと読む)
画像表示システム
【課題】撮影されている閲覧者の輪郭部分を明確にして背景画像と合成し、リアルタイムに表示することが可能な画像表示システムを提供する。
【解決手段】画像処理装置2は、映像上の1人以上の人物とコンテンツとの合成のタイミングを定めたシナリオデータを記憶したシナリオデータ記憶手段、合成に用いる背景画像をコンテンツとして記憶したコンテンツ記憶手段、顔検出枠の位置・矩形サイズを顔検出枠データとして出力する顔検出手段21、取得した顔検出枠データを、他のフレームの顔検出枠データと対応付けるトラッキング手段23、顔検出枠データを含む顔オブジェクトに対して、シナリオデータに含まれる人物との対応付けを行うシナリオデータ対応付け手段83、セグメント領域を利用して人物と人物以外の部分にセグメント化したセグメント結果画像を用いて、背景画像をマスクし、フレーム中の人物と背景画像を合成した合成画像生成手段84を備える。
(もっと読む)
停止線検出システム、停止線検出装置、停止線検出方法及びコンピュータプログラム
【課題】路面に形成された停止線を適切に検出することを可能にした停止線検出システム、停止線検出装置、停止線検出方法及びコンピュータプログラムを提供する。
【解決手段】停止線を認識対象とした高精度ロケーションシステムを用いて、停止線の候補となる地物(停止線候補)を検出した場合に、停止線候補が道路幅方向に対して所定長さ未満の形状を有する複数の線分から構成され、車両から複数の線分までの各距離が等距離であり、且つ複数の線分の内で道路幅方向の両端に位置する2つの線分の外側端部間の長さが所定長さ以上であると判定された場合に、該停止線候補を停止線として検出するように構成する。
(もっと読む)
物体検出装置を搭載する移動体
【課題】演算コストがより低い物体検出装置を搭載する移動体を提供すること。
【解決手段】本発明に係るショベル60に搭載される物体検出装置100は、2つのカメラのそれぞれが撮像するカメラ画像の視差に基づいて物体を検出する。物体検出装置100は、被撮像空間を通る仮想直線上の複数の検査点のうちの1つに対応する画素を含む部分画像をカメラ画像から抽出する部分画像抽出部10と、同一の検査点に対応する各カメラ画像の部分画像同士の類似度に基づいて検査点に関する評価値を決定する評価値決定部11と、評価値決定部11が決定する評価値を用いて物体の存否を判定する物体存否判定部12とを備える。仮想直線は、ショベル60が動いたときにショベル60の一部が到達可能な空間領域を通る。
(もっと読む)
危険検知装置及び危険検知方法
【課題】危険な状態を短時間で、かつ精度よく検知することが可能な危険検知装置を提供する。
【解決手段】位置情報取得手段101は、人物の身体上部の一点である計測点の位置情報を取得する。移動ベクトル算出手段102は、位置情報の変化を示す移動ベクトルを算出する。下降検出手段103は、移動ベクトルの垂直方向成分である垂直移動データに基づいて計測点の下降を検出する。反転検出手段104は、移動ベクトルの水平方向成分である水平移動データに基づいて計測点の反転を検出する。危険状態判定部105は、下降検出手段103が下降を検出し、かつ水平移動ベクトル反転検出手段104が反転を検出したとき、危険状態と判定する。出力部106は、危険状態判定部の判定結果に応じて危険情報を出力する。
(もっと読む)
対象物種別判定装置
【課題】対象物の種別判定に要する演算負荷の軽減及び種別判定時間の短縮を図ることができる対象物種別判定装置を提供する。
【解決手段】赤外線カメラ2Rにより撮像された撮像画像から対象物の対象物領域Rを抽出し、対象物領域R内の運動判断領域Pについての輝度プロファイルJnを作成する(STEP106)。現在よりΔT前に作成した輝度プロファイルJoをメモリから読出し、Jn,Joの特徴量の差異が所定値以上であるか否かを判定する。所定値以上の差異があれば、対象物は生体(例:歩行者)であると判定し(STEP110)、なければ、現在よりΔT/2前に作成した輝度プロファイルJhをメモリから読出し、Jn,Jhの特徴量の差異が所定値以上であるか否かを判定し、所定値以上の差異があれば、対象物は生体であると判定し、なければ、対象物は生体でないと判定する。
(もっと読む)
画像処理装置、駐車支援システム、画像処理方法及びプログラム
【課題】画像に基づいて車両の駐車対象となる駐車枠の存在を迅速に判定する。
【解決手段】画像処理装置2では、横枠線検出部44が画像G中の1つの横枠線検出領域に基づいて駐車枠の横枠線L1を検出し、縦枠線検出部45が画像G中の2つの縦枠線検出領域に基づいて2つの縦枠線を検出する。さらに、接続部検出部47が、画像G中の2つの縦枠線検出領域に基づいて2つの接続部を検出する。そして、駐車枠判定部48は、これらの検出結果に基づいて駐車対象となる駐車枠の存在を判定する。画像Gの全体ではなく画像G中の限られた領域に基づいて駐車枠の存在を判定するため、駐車枠の存在を迅速に判定できる。
(もっと読む)
物体検出装置を搭載する移動体
【課題】演算コストがより低い物体検出装置を搭載する移動体を提供すること。
【解決手段】本発明に係るショベル60は、ショベル60の動作状態を検出する動作状態検出部65と物体検出装置100とを備える。物体検出装置100は、複数のカメラのそれぞれが撮像するカメラ画像の視差に基づいて物体を検出する。また、物体検出装置100は、被撮像空間を通る仮想直線上の複数の検査点のうちの1つに対応する画素を含む部分画像をカメラ画像から抽出する部分画像抽出部10と、同一の検査点に対応する各カメラ画像の部分画像同士の類似度に基づいて検査点に関する評価値を決定する評価値決定部11と、評価値決定部11が決定する評価値を用いて物体の存否を判定する物体存否判定部12とを備える。仮想直線は、ショベル60の動作状態に応じて配置される。
(もっと読む)
物体検出方法及び物体検出装置
【課題】演算コストがより低い物体検出装置を提供すること。
【解決手段】2つのカメラ2a、2bのそれぞれが撮像するカメラ画像2aR、2bRの視差に基づいて物体50を検出する物体検出装置100は、被撮像空間を通る仮想直線VL上の複数の検査点IP1〜IP5のうちの1つIP1に対応する画素を含む部分画像2aR1、2bR1をカメラ画像2aR、2bRから抽出する部分画像抽出部10と、同一の検査点IP1に対応するカメラ画像2aR、2bRの部分画像2aR1、2bR1同士の類似度に基づいて検査点IP1に関する評価値CGRAを決定する評価値決定部11と、評価値決定部11が決定する評価値を用いて物体50の存否を判定する物体存否判定部12とを備える。
(もっと読む)
顔向き検出装置
【課題】検出精度の向上及び演算負荷の低減の少なくとも一方につながる新たな顔向き検出装置を提供する。
【解決手段】顔向き検出装置12は、特徴部抽出手段24により抽出された複数の特徴部の中から人物100の鼻孔124を抽出する鼻孔抽出手段24を有する。鼻孔抽出手段24は、複数の特徴部のうち最も移動量の大きい特徴部を鼻孔124として抽出する。
(もっと読む)
基板検査装置及び検査方法
【課題】基板検査装置及び検査方法を提供すること。
【解決手段】検査方法は、測定対象物を撮影して測定対象物のピクセル別にイメージデータを取得し、測定対象物のピクセル別に高さデータを取得し、測定対象物のピクセル別にビジビリティデータを取得し、取得されたイメージデータと、ピクセル別の高さデータ、及びビジビリティデータのうちの少なくとも1つとを乗算して結果値を算出し、算出された結果値を利用してターミナル領域を設定すること、を含む。よって、より正確にターミナル領域を判別することができる。
(もっと読む)
入力方法
【課題】
ユーザにとって使い勝手のよい入力装置を提供する。
【解決手段】
本発明に係る入力装置は、所定の動き画像信号が入力される入力部と、前記入力部に入
力された動き画像信号から動き検出を行う動き検出部と、前記動き検出部により検出され
た動きが所定の動きであった場合に所定の映像信号を出力する映像信号処理部と、制御部
とを備え、前記制御部は、前記映像信号処理部により前記所定の映像信号が出力されてい
る場合には、前記動き検出部は動き検出を行わないように前記動き検出部を制御すること
を特徴とする。
(もっと読む)
1 - 20 / 1,346
[ Back to top ]