
Fターム[5B057DA07]の内容
Fターム[5B057DA07]に分類される特許
201 - 220 / 3,964
車両周辺監視装置
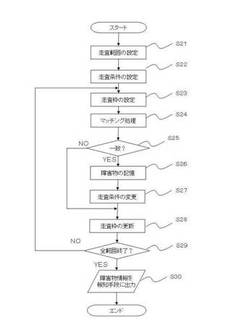
【課題】障害物が検出された検出領域について走査を省略することで処理負荷を削減することを目的とする。
【解決手段】車両周辺監視装置は、カメラの映像信号を入力する映像入力手段11と、入力画像についてパターンマッチング処理によって障害物を検出する走査を行う障害物検出手段12と、障害物検出手段12の走査方法を制御する走査制御手段13とを備え、走査制御手段13は、障害物検出手段12が障害物を検出した場合にその検出領域について走査を省略することを特徴とする。
(もっと読む)
3次元計測装置およびその方法

【課題】計測装置が揺動する状況下であっても、計測対象の3次元形状を好適に計測することができる3次元計測装置を提供する。
【解決手段】撮像装置12により撮像された画像データを含む撮像情報を取得する撮像部11と、撮像情報に基づいて計測対象の3次元座標を取得する3次元形状演算処理部23と、撮像装置12の加速度および姿勢角度を含む位置姿勢情報を撮像情報の取得と同期して取得する位置姿勢計測部14と、位置姿勢情報に基づいて計測原点に対する撮像装置12の移動量・方向と姿勢角度の変化量・方向とを演算する位置姿勢補正処理部17と、撮像情報と同期して取得された撮像装置12の移動量および方向と姿勢角度の変化量および方向とに基づいて3次元形状演算処理部23により得られる3次元座標を平行移動および回転して複数の3次元座標を統合し、計測対象の3次元形状を取得する統合演算処理部24とを備えた。
(もっと読む)
画像処理装置、画像処理方法
【課題】 高解像度の画像に対してリアルタイムでの物体認識を可能とする技術を提供すること。
【解決手段】 全方位の撮像が可能な撮像装置が撮像した画像を高解像度画像として取得すると共に、該高解像度画像から解像度を低下させた画像を低解像度画像として取得する。低解像度画像から、予め定められた被写体が写っている領域を被写体領域として検出する。高解像度画像において、被写体領域に対応する領域を特定し、該特定した領域に対して、該領域内の被写体を認識する処理を行う。認識結果を出力する。
(もっと読む)
画像処理装置及びプログラム
【課題】 本発明は、多重画像を用いて種類の異なる複数の画像処理を行なう場合に画像処理の効率化が施された手段を提供する。
【解決手段】 画像処理装置は、画像読込部と、多重画像生成部と、制御部とを備える。画像読込部は、画像を読み込む。多重画像生成部は、画像読込部が読み込んだ画像に基づいて、解像度の異なる複数の多重画像を生成する。制御部は、多重画像を使用する、種類の異なる複数の画像処理において、多重画像を共通して用いるように制御する。
(もっと読む)
測距装置
【課題】ステレオカメラの撮像画像の視差から対象物までの距離分布を求め、先行車の検知に使用される測距装置において、距離分布演算の計算時間を短縮し安全性を向上する。
【解決手段】測距装置21は、低速高精度な第1の距離分布演算部3と、高速低精度な第2の距離分布演算部22と、追突回避距離計算部24とを備え、車速センサ12からの車速情報は追突回避距離算出部24に入力され、この追突回避距離算出部24において車速に対応した追突回避距離が求められ、設定部23は、第2の距離分布演算部22の3D計測部22bで求められた距離分布の内、前記追突回避距離から±αの距離に該当する部分を、第1の距離分布演算部3の処理領域に設定する。
(もっと読む)
駐車支援装置
【課題】自車両が移動しても駐車スペースが表示画面に表示される俯瞰映像をリアルタイムにユーザに提供すること。
【解決手段】駐車支援装置1は、車両を駐車させるための駐車目標位置を第1俯瞰映像より検出する駐車目標位置検出手段34と、視点位置を決定する視点位置決定手段34と、回転量を決定する回転量決定手段34と、視点位置と回転量とに基づいて第1俯瞰映像を回転させる視点変換テーブルを作成する視点変換テーブル作成手段35と、視点変換テーブルに基づいて第1俯瞰映像より第2俯瞰映像を生成する第2俯瞰映像生成手段36とを有する。
(もっと読む)
画像処理装置、そのプログラム、および画像処理方法
【課題】観察者が違和感を覚えることなく立体視可能な立体画像が生成される可能性を高める。
【解決手段】画像処理装置は、互いに異なる視点から被写体がそれぞれ撮影された第1画像と第2画像とを取得する第1取得手段と、被写体を撮影した撮像系から被写体の各点までの距離である被写体距離にそれぞれ対応した各距離情報を取得する第2取得手段と、被写体の立体画像を生成する手段であって、第1画像と第2画像との双方を用いて前記立体画像を生成する第1生成処理と、第1画像と第2画像とのうちの何れか一方を用いて前記立体画像を生成する第2生成処理とを、前記各距離情報に応じて選択的に行うことにより、前記立体画像を生成する生成手段と、を備える。
(もっと読む)
画像処理装置および画像処理方法
【課題】撮影画像各部における被写体までの距離を把握し、主要被写体までの距離に応じたぼかし処理を施す。
【解決手段】画像から主被写体を選択する(S500)とともに、主要被写体までの距離を取得する(S502)。主要被写体が近距離にあると判断されるときには(S504)、近距離用マスク濃度算出カーブを選択し(S506)、遠距離にあると判断されるときには遠距離用マスク濃度算出カーブを選択する(S516)。選択されたマスク濃度算出カーブを用いてぼかし処理用のマスク濃度を作成する(S512)。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】処理時間を低減することができる画像処理装置、画像処理方法、およびプログラムを提供する。
【解決手段】モニタ22は、計測対象物の画像と、計測対象物に対応する物体であって予め算出された3次元形状を有する物体の画像とを表示する。CPU34cは、リモコン23を介して入力される指示に基づいて、計測対象物の画像上の第1の点と物体の画像上の第2の点とを指定する。CPU34cは、第1の点を基準とする第1の図形と、第2の点を基準とする第2の図形との幾何学計算を行い、幾何学計算の結果に基づいて、計測対象物の画像と物体の画像との少なくとも一方の姿勢または位置を調整する。CPU34cは、姿勢または位置が調整された後、リモコン23を介して入力される指示に基づいて指定された計測位置に対応する物体上の空間座標を算出し、算出した空間座標に基づいて、物体のサイズを算出する。
(もっと読む)
画像処理方法及び画像処理装置
【課題】取得画像のコンテンツに依存することなしに画像の歪み及び変形を補正することを可能にする画像処理方法等を提供する。
【解決手段】画像処理方法は、取得画像におけるオブジェクト領域の輪郭の角を推定し、オブジェクト領域から離れる方向に沿って所定角度範囲内でその推定された角からオフセットされる2つの点の間でオブジェクト領域の輪郭線を探し、オブジェクト領域の輪郭の最終的な角として輪郭線の交差点を決定し、オブジェクト領域の最終的な輪郭として前記最終的な角の間の輪郭線を決定する。
(もっと読む)
画像処理方法、画像処理装置、スキャナ及びコンピュータプログラム
【課題】本の上下の輪郭線に基づき本のページの曲面を補正する画像処理方法等を提供する。
【解決手段】画像処理方法は、概して、2次元画像における曲面上で消失点を取得するステップと、消失点によって前記曲面の上輪郭線及び下輪郭線の間の全ての直線セグメントを取り出すステップと、平行な直線セグメントを得るよう透視歪みを除去するステップと、直線セグメントの長さを取得し、その長さに従って3次元空間における各直線セグメントの正確な幅及び直線セグメントの奥行き増分を取得するステップと、正確な幅及び奥行き増分に従って各直線セグメントの拡大された幅を取得するステップと、曲面を平面に変換するよう曲面の全体的な拡大された幅を取得するステップと、曲面上の画像コンテンツを平面上に変換するステップとを有する。
(もっと読む)
区画線認識装置、区画線認識方法、プログラム及び媒体
【課題】より適切な警報を行ってドライバに自車両を自車線の中央を維持する走行を適切に促すことができる区画線認識装置を提供すること。
【解決手段】本発明による区画線認識装置1は、車両の前方の路面を含んで撮像する撮像手段2と、撮像手段2の出力する画像情報から路面内のエッジ点を抽出するエッジ点抽出手段3aと、エッジ点から区画線に相当する可能性を有する線分群を抽出する線分抽出手段3bと、線分群から区画線に相当する線分を検出する検出手段3cと、を含み、検出手段3cによる検出が所定未検出回数N以上なされない場合に、所定再検出回数M以上連続して、検出手段3cによる検出がされた場合に、検出を確定する確定手段3dを含むことを特徴とする。
(もっと読む)
映像機器
【課題】その動画を代表するに適切なフレームを選び出して代表静止画とする映像機器を提供する。
【解決手段】本発明による映像機器は、撮影済みの動画を記録する記録装置と、上記記録されている動画の中から、被写体人物の目を検出する目検出装置と、上記検出された目の有る画像を代表画像として送り出す送出装置と、を有する。
(もっと読む)
路面画像処理システム及び路面画像処理方法
【課題】ラインカメラの画像からラインカメラの視野範囲が移動した軌跡を特定し、路面全体の画像を正確に生成することが可能な技術を提供する。
【解決手段】本発明の路面画像処理システムは、車両と、車両に搭載されており、一方向に長い第1視野範囲内の路面を撮影する第1ラインカメラと、車両に搭載されており、一方向に長く、第1視野範囲と交差する第2視野範囲内の路面を撮影する第2ラインカメラと、車両の走行距離に応じて第1ラインカメラと第2ラインカメラに繰り返し撮影を指示する手段と、第1ラインカメラが撮影した画像系列にアフィン変換を施した画像と、第2ラインカメラが撮影した画像系列にアフィン変換を施した画像について、最も高い一致度を与えるアフィン変換パラメータを探索する手段と、探索されたアフィン変換パラメータに基づいて、第1視野範囲と第2視野範囲が交差する点の進行方向を算出する手段を備えている。
(もっと読む)
撮像装置
【課題】幼児の写真を簡易に撮影する。
【解決手段】デジタル信号回路18は、撮影して得られた画像信号から人体を検出するとともに、顔部を検出する。システム制御回路20は、人体の頭部と肩部の比率から人体の年齢を推定し、しきい年齢以下であれば被写体が幼児であると判定してLED30を自動点滅させて被写体の注意を惹く。
(もっと読む)
カメラキャリブレーション装置
【課題】車両の停車誤差の影響を排除できるキャリブレーションを簡易な設備で実施する。
【解決手段】自車12の形状に対応した2点と交わる線を含み、カメラ10の撮像範囲内に少なくとも2本配置される参照線RLと、この参照線RLの間に予め定められたパターン形状を有する校正用パターンPPとを有する測定領域MAと、画像処理部14とを備えている。そして、画像処理部14が、カメラ10で校正用パターンPP及び参照線RLが配置される測定領域MAを撮影することで前記測定用画像IMを生成する撮像処理18と、前記2本の前記参照線RLに基づいて前記自車12の停車位置と前記パターン形状との座標関係を停車誤差として算出する停車誤差算出処理20と、当該停車誤差をキャンセルした状態で前記パターン形状に基づいて前記カメラ10の取付姿勢に対応する外部パラメータを算出する外部パラメータ算出処理22とを備えた。
(もっと読む)
画像処理方法、画像処理装置及びスキャナ
【課題】特定のオブジェクトの境界の内側にある、画像における領域を確保し、これにより特定のオブジェクト手の領域、即ち別のオブジェクトを画像から間接的に除く。
【解決手段】画像処理方法は、画像における前景のオブジェクトのエッジマップを決定するエッジマップ決定手段、エッジマップから境界線の候補を取得し、境界線の候補のうちで、前景のオブジェクトにおける特定のオブジェクトの境界を定義する境界線を決定する境界線決定手段、及び特定のオブジェクト以外の前記境界線を超える前記前景のオブジェクトを除く除去手段を備える。この方法は、特定のオブジェクトの境界を越えて捕捉された画像における、例えば手のような別のオブジェクトの画像を除去することに適用される。本発明の実施の形態に係る画像処理方法によれば、画像における特定のオブジェクトの境界は、正確に決定され、これにより境界を越える別のオブジェクトを除去して、その後の他の画像処理を容易にすることができる。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】種々の撮影対象について、ステレオマッチングにおける誤対応をより正確に検出することが可能な画像処理装置、画像処理方法および画像処理プログラムを提供する
【解決手段】画像処理装置201は、撮影対象を異なる方向から撮影して得られた複数の画像について、複数の画像間における画素の対応付けを行なうことにより視差を算出するためのステレオマッチング部10と、ステレオマッチング部10によって算出された視差に基づいて、画像における各画素の位置を3次元座標系における3次元座標に変換するための3次元座標計算部20と、3次元座標計算部20によって変換された各画素の3次元座標に基づいて、ステレオマッチング部10によって行われた対応付けの誤りを検出するための誤対応検出部30とを備える。
(もっと読む)
画像処理装置および方法、プログラム、並びに記録媒体
【課題】リンギングやゴースト等のアーティファクトを抑制しつつ、より小さい回路規模で、かつ、より少ない計算量で、ぶれまたはぼけを補正する。
【解決手段】時間的に連続する画像のぶれまたはぼけを補正する画像処理装置において、零点成分抽出部は、注目する注目フレームに位置合わせされた、注目フレームより時間的に前のフレームであって、ぶれまたはぼけが補正された補正済みフレームから、所定のフィルタを用いて注目フレームに含まれない周波数成分を抽出し、合成部は、零点成分抽出部により抽出された周波数成分と注目フレームとを合成する。本技術は、デジタルカメラ等の撮像装置に適用することができる。
(もっと読む)
画像照合装置、患者位置決め装置及び画像照合方法
【課題】放射線治療の患者位置決めの際に、3次元現在画像の断層画像数が3次元基準画像よりも少ない場合であっても、精度の高い2段階パターンマッチング(2段階照合)を実現することを目的にする。
【解決手段】3次元基準画像と3次元現在画像とを照合し、現在画像における患部の位置姿勢を基準画像における患部の位置姿勢に合うように体位補正量を計算する照合処理部22と、を備える。照合処理部22は、基準画像から現在画像に対して1次照合を行う1次照合部16と、基準画像又は現在画像の一方から1次照合の結果に基づいて生成された所定のテンプレート領域から、所定のテンプレート領域の生成元とは異なる基準画像又は現在画像の他方から1次照合の結果に基づいて生成された所定の検索対象領域に対して、2次照合を行う2次照合部17と、を有する。
(もっと読む)
201 - 220 / 3,964
[ Back to top ]