
Fターム[5B057DA07]の内容
Fターム[5B057DA07]に分類される特許
121 - 140 / 3,964
監視装置、その方法、及び、そのプログラム
【課題】監視対象物が移動しても確実に追従できる監視装置を提供する。
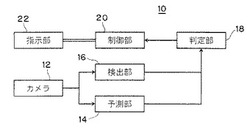
【解決手段】監視対象物を指し示す指示部22と、前記監視対象物を撮像して時系列の画像を取得するカメラ12と、前記時系列の画像から複数の特徴点を抽出すると共に、前記各特徴点の移動量を算出し、予め設定された基準移動量より前記移動量が大きな特徴点の第1の集合の移動先位置Bを予測する予測部14と、前記時系列の画像間の差分に基づいて変化領域を抽出し、前記変化領域の重心位置Oを検出する検出部16と、前記平均移動量が第1の閾値と比較して大きい場合には前記移動先位置Bを指示位置と設定し、小さい場合には前記重心位置Oを指示位置と設定する判定部18と、前記指示部が前記指示位置を指し示すように前記指示部を制御する制御部20とを有する。
(もっと読む)
情報処理装置、情報処理方法、及びプログラム

【課題】隣接する部分画像間のずれが蓄積してしまうことを抑えることが可能な情報処理装置、情報処理方法、及びプログラムを提供すること。
【解決手段】本技術の一形態に係る情報処理装置は、記憶部と、判定部と、生成部とを具備する。前記記憶部は、被写体に対して複数の撮影領域が互いに重なるように撮影されることで得られた複数の部分画像と、前記複数の部分画像のうちの隣接する2つの部分画像ごとに算出された、当該隣接する2つの部分画像の相対的な位置ずれ情報とを記憶する。前記判定部は、前記記憶された複数の部分画像から、前記被写体の画像として表示される領域の画像である表示領域画像を生成するための、1以上の表示用部分画像を判定する。前記生成部は、前記判定部により複数の表示用部分画像が判定された場合に、当該複数の表示用部分画像を前記記憶された位置ずれ情報をもとに互いに接続して、前記表示領域画像を生成する。
(もっと読む)
画像処理装置および画像処理方法
【課題】記録媒体に対応させてパッチ記録後の色安定時間を設けてキャリブレーションを行う構成において、登録されていない記録媒体についても高精度なキャリブレーションを実行することを可能とする。
【解決手段】記録終了後から記録された画像の色変化が安定するまでに必要な待機時間(色安定時間)を検知する(S201)。次に、対象となる記録メディアの目標濃度値となるターゲット値を設定する。(S202)。そして、その記録メディアと対応づけた色安定時間情報、ターゲット値情報をキャリブレーション対応メディア情報として格納する(S203)。
(もっと読む)
デュアルデジタルカメラセンサを備えたモバイルデバイス及び使用方法
【課題】2つのセンサから取得された画像を合成して高度なアプリケーションをサポートする。
【解決手段】モバイルデバイス100は、第1のセンサ102と、第2のセンサ104と、センサ位置コントローラ106と、カメラ処理パイプライン108とを含む。パイプラインは、例えばモザイク除去、レンズロールオフ補正、拡大縮小、色補正、色変換、及び空間フィルタリングのような技術を実行する。センサ位置コントローラは、センサ102、104を回転、シフト、又はスライドして、2つのセンサの場所及び/又は位置を調整する。センサ102、104は、画像品質の改善、3−D画像及びビデオの視覚化、及び360度パノラマビデオの生成のような機能をもつ。
(もっと読む)
画像処理装置及び画像処理方法、並びにプログラム
【課題】合成後の広角画像の繋ぎ合わせの部分の違和感を低減する。
【解決手段】撮像装置1は、複数の画像のデータを所定方向に合成してワイド画像のデータを生成し、エネルギー算出部52は、複数の画像のデータにおける一の画像と当該一の画像の合成対象である他の画像とに基づいて、一の画像内の注目画素に対応したエネルギーを夫々算出する。エネルギー最小経路探索部54と、注目画素のエネルギーが最小となるエネルギー最小経路Rを探索する。範囲探索部55は、エネルギー最小経路Rにおける一の画像内の各注目画素の値と類似する値を有する画素の範囲を探索する。αブレンド幅決定部56は、エネルギー最小経路を起点とするブレンド幅を決定する。透過度設定部58は、ブレンド幅に基づき、他の画像に対する一の画像の透過度を設定する。合成部59は、ブレンド幅と透過度とに基づいて、一の画像と他の画像とを合成する。
(もっと読む)
並列処理システム及び車両走行システム
【解決課題】動画を高速処理して必要情報を抽出する並列処理システム、及び並列処理システムを用いてリアルタイムな動画情報を基に車両の安全走行を行う車両走行システムの提供。
【解決手段】並列処理システム1は、大量のデータをn個のデータ集合体に区分する信号変換部30、信号変換部30からのn個のデータ集合体を処理するデータ処理部50、信号変換部30及びデータ処理部50が連結されているルータ40を具備する。データ処理部50は、区分されたn個のデータ集合体が割り当てられ、割り当てられたデータ集合体を同時並行処理して、所定の処理データを出力するn個のプロセッサ51、ルータ40を介して、n個のプロセッサのそれぞれから出力されるn個の処理データを受け入れ、n個の当該処理データを統合して全体処理を行って所望の加工データを出力する1個のマスタプロセッサ52を含む。
(もっと読む)
画像検査装置、画像形成装置、画像検査装置の制御方法及び画像形成システム
【課題】画像形成出力による出力結果を読み取った画像とマスター画像とを比較することによる画像の検査において、装置の稼動状況の経時変化による画像の位置ずれを補正し、画像の比較に要する処理の負荷を低減すること。
【解決手段】画像形成装置によって紙面上に画像形成出力された画像を読み取った読み取り画像の検査をページ毎に行う画像検査装置であって、マスター画像において設定された基準点周囲の画像を、読み取り画像において検索することにより読み取り画像における基準点を抽出し、マスター画像及び読み取り画像夫々における基準点の位置の差異に基づいて補正パラメータを算出し、前ページまでの画像の検査において算出された補正パラメータに基づいてマスター画像を補正し、基準点抽出の際、補正パラメータに基づいて補正されたマスター画像と読み取り画像において前記基準点を抽出することを特徴とする。
(もっと読む)
超音波診断装置、超音波画像処理装置及び超音波画像処理プログラム
【課題】例えば乳腺等の連続構造物と微小石灰化部分等の微小構造物とを正確に区別し、微小構造物を抽出することができる超音波診断装置等を提供すること。
【解決手段】第1の超音波画像と、前記第1の超音波画像と撮像位置の異なる第2の超音波画像と、を用いた画像処理であって、第1の超音波画像の所定の画素に対応する参照領域を前記第2の超音波画像に設定し、前記参照領域の代表画素値と前記所定の画素の画素値とに基づいて画素値を決定する画像処理を行って、処理画像を生成する画像処理手段と、前記処理画像を表示する表示手段と、を具備することを特徴とする超音波診断装置である。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】よりノイズの少ない画像を得ることができるようにする。
【解決手段】動き検出部は、現フレームと1つ前のフレームの参照画像の差分を求めることで参照画像の動きを検出し、その検出結果に基づいてフィードバック調整量を算出する。動き補償部は、現フレームと1つ前のフレームの参照画像から求まる参照画像のテクスチャ情報に基づいて、1つ前のフレームのフィルタ出力画像の動き補償を行なう。ブレンド部は、動き補償されたフィルタ出力画像と、現フレームの入力画像とを、フィードバック調整量に基づいて混合し、現フレームのフィルタ出力画像とする。本技術は、画像処理装置に適用することができる。
(もっと読む)
多層パターンを印刷する方法及び装置
【課題】基板上に多層パターンを印刷する方法及び装置を提供する。
【解決手段】一実施形態では、多層パターンを印刷する方法は、基板の表面の一領域上に第1パターン化層を堆積させることを含む第1印刷工程と、表面の前記領域、すなわち第1パターン化層の上に第2パターン化層を堆積させることを含む第2印刷工程と、第1パターン化層に対する第2パターン化層の位置決めの精度を確認する工程とを含む。確認する工程は、第1印刷工程後に第1パターン化層の第1光学画像を取得する工程と、第2印刷工程後に第2パターン化層の第2光学画像を取得する工程と、第1減算光学画像を形成するために画像減算を行う工程と、減算光学画像を第1画像と比較することによって第2パターン化層の位置を決定する工程とを含む。
(もっと読む)
情報処理装置および情報処理方法
【課題】撮影した疾患部の画像と当該画像に対する診断支援情報とを効率的に把握可能とする技術を提供する。
【解決手段】診断を支援する情報処理装置において、被検体のシェーマに記録される疾患部の位置を示す位置情報を得る第一の手段と、位置情報に基づいて被検体の医用画像データから疾患部に対応する領域を抽出する第二の手段と、を有する。
(もっと読む)
3D映像処理装置
【課題】 複数の撮影拠点の3D映像を同時に表示するときの見やすさを向上することのできる3D映像処理装置を提供する。
【解決手段】 3D映像処理装置は、複数の拠点A、Bに設置された3Dカメラで撮影した3D映像が入力されると、複数の拠点A、Bの3D映像の各々から注目領域を検出し、注目領域の視差から複数の拠点A、Bの3D映像における注目領域の飛び出し量を求める。そして、3D映像の各々に含まれる注目領域の飛び出し量を、上記のようにして求めた飛び出し量に基づいて決定される目標調整量に応じて調整し、飛び出し量が調整された複数の拠点A、Bの3D映像を合成して3Dマルチ表示映像を生成する。
(もっと読む)
大塊搬送物検知システム
【課題】大塊搬送物を好適に検知することが可能な大塊搬送物検知システムを提供する。
【解決手段】大塊ずり検知システム1は、ずり2を搬送するベルト12を有するベルトコンベア10と、ベルト12上のずり2に光を照射する照明部30と、光が照射されたずりを時間を空けて複数回撮影する撮影部40と、ずりに一方から光が照射された時刻t1に撮影された第一の画像とベルト12の走行によってずりに他方から光が照射された時刻t2(>t1)に撮影された第二の画像とに基づいて、大塊ずりを検知する大塊ずり検知部53bと、を備え、大塊ずり検知部53bは、ベルト12の速度をvとしたとき、v・(t2−t1)に基づいて第一の画像及び第二の画像の位置合わせを行って第一の画像及び第二の画像の論理積画像を生成し、論理積画像から大塊ずりを検知する。
(もっと読む)
被検体の配向を決定する方法及び装置
【課題】イメージング・システムにおいて、医師が精度を高めつつ時間量を短縮して医学的診断を下す能力を向上させる。
【解決手段】被検体の配向を決定する方法が、イメージング・システムにおいて、撮像されている被検体の配向を指示する入力を受け取るステップと、特徴認識システムを用いて被検体の配向を自動的に決定するステップと、受け取った入力を自動的に決定された配向と比較するステップと、比較に基づく配向指標を含む画像を形成するステップとを含んでいる。また、対象配向認識システム及びイメージング・システムも本書に記載されている。
(もっと読む)
画像処理装置およびその制御方法
【課題】 複数の視点から撮像した画像に基づいて、より広範囲における任意の被写体の位置情報を取得する。
【解決手段】 上記課題を解決するために、本発明の画像処理装置は、第一の画像と、前記第一の画像とは異なる視点から撮像した第二の画像とを取得する取得手段と、前記第一の画像および前記第二の画像それぞれにおける被写体の特徴点を検出する検出手段と、前記第一の画像および前記第二の画像に基づいて、前記被写体の位置情報を算出する算出手段とを有し、 前記算出手段は、前記第一の画像および前記第二の画像の両方において前記特徴点が検出された場合、前記特徴点それぞれに基づいて、前記位置情報および前記被写体に対応する被写体モデルを算出し、前記第一の画像および前記第二の画像のいずれかのみにおいて前記特徴点が検出された場合は、前記被写体モデルを参照して、前記情報を算出することを特徴とする。
(もっと読む)
書籍用スキャン装置及び画像処理プログラム
【課題】書籍12をデジタルカメラ14で撮影する書籍用スキャナーにおいて頁の綴じ部分16までの撮影を高速に、簡易に、安価で可能とする書籍用スキャナーを提供する。
【解決手段】V字型の書籍台11に置かれた書籍12を、V字型の透明な板13で押さえ、書籍12の上方からデジタルカメラ14を設置し、必要に応じて偏光フィルターを設置して撮影する装置を用い、撮影して得られた電子データを、画像処理プログラムを用いて、デジタルカメラ14からの距離に応じて補正を行うことにより正規の形へ変形させて平面画像に投影し、所望する画像を得る。
(もっと読む)
物体姿勢推定方法、物体姿勢推定装置、物体推定姿勢精緻化方法、およびコンピューター可読媒体
【課題】物体を、ロボットの搭載カメラから見える通りのその姿勢にかかわらず認識することができるようにする。
【解決手段】物体を包含する画像を入力し、入力画像の2値マスクを作成、入力画像の2値マスクからシングレットのセットを抽出する。各シングレットは、入力画像内の物体の内側および外側輪郭内にある点を表す、抽出することと、シングレットのセットを連結し、デュプレックス行列として表されるメッシュにし、候補姿勢のセットを作るべく2つのデュプレックス行列を比較するこし、物体姿勢推定値によって、入力画像から物体の姿勢が推定され、次に、物体姿勢推定が記憶される。物体の推定姿勢は、カメラのパラメーターの入力、物体のモデルを物体の仮想画像に投影、初期姿勢パラメーターを新しい姿勢パラメーターに更新、エネルギー関数の最小化によって精緻化される。
(もっと読む)
画像処理装置及び方法、記録媒体、並びにプログラム
【課題】簡素な構成で容易に、略球面体が撮像された画像の高画質化を図ることができるようにする。
【解決手段】動きベクトル検出部は、略球面の被写体を含む複数の撮像画像のうち、処理対象の1枚と、比較対象の他の1枚とについての、被写体についての比較を、複数の撮像画像の各々を処理対象として実行し、処理対象についての3次元球面モデル全体についての動きベクトルを検出する。動き補償部は、複数の撮像画像の各々の動きベクトル検出部により検出された動きベクトルに基づいて、処理対象に動き補償を施す。合成部は、動き補償部による動き補償が施された結果得られる撮像画像の各々を合成する。本技術は、画像処理装置に適用することができる。
(もっと読む)
車両周辺監視装置
【課題】ピッチ検出器を用いることなく、単眼カメラによる構成においてもピッチング補正を行うことができる機能を備えた車両周辺監視装置を提供する。
【解決手段】車両周辺監視装置は、所定の制御周期毎に、車両に搭載されたカメラによる撮像画像を取得し、今回の制御周期での撮像画像の前回の制御周期からの変位量を算出し、該変位量を用いて車両の挙動に起因する撮像画像の変位分を相殺するためのピッチング補正値を算出し、今回の撮像画像に対して、ピッチング補正値による補正を行った補正画像を生成し、補正画像から対象物を検出する。変位量は、撮像画像から、地平線より上側の所定領域、地平線を含み地平線より下側から上側までの所定領域、又は自車両から所定距離内の先行車両を含む所定領域を監視領域として切出し、今回の制御周期における撮像画像の監視領域と前回の制御周期における撮像画像の監視領域間で求める。
(もっと読む)
制御システム
【課題】人物が存在する領域のみに照明や空調を限定して動作させる制御システムを提供する。
【解決手段】カメラによって撮影された人物が写った画像が入力される画像入力部101と、地図が入力される地図入力部102と、前記画像上の点と前記地図上の点との対応関係を示す対応点情報を入力する対応入力部103と、前記対応点情報に基づいて、前記画像の分割領域毎に変換パラメータを算出する算出部105と、前記分割領域毎の前記変換パラメータを用いて、前記画像上の前記人物がいる位置を前記地図上の位置に変換する変換部107と、前記人物が存在する位置に照明や空調を限定して動作させる制御部と、を有する。
(もっと読む)
121 - 140 / 3,964
[ Back to top ]