
Fターム[5B057DA11]の内容
Fターム[5B057DA11]の下位に属するFターム
Fターム[5B057DA11]に分類される特許
21 - 40 / 248
画像処理装置、画像処理方法及び画像処理プログラムを記録した記録媒体
【課題】撮影された時系列画像から、人物らしい領域に対して個人が特定できないように画像変換を行う。
【解決手段】複数フレームの画像を元に、各画素の平均値を算出するステップと、平均値から大きく外れている画素値を取り除くステップと、該当画素から分散値を算出するステップと、分散値に対して、膨張処理、収縮処理を行い、分散値画像を生成し、多次元の変換式により変換を行うステップと、背景画像を更新するステップと、取得した画像から低周波数成分画像を生成するステップと、取得した画像と低周波数成分画像の差分から高周波数成分画像を生成するステップと、背景画像と取得した画像との差異から人物らしさを算出するステップと、高周波数成分画像の各画素の値を人物らしさの各画素の値を用いて抑制した抑制後の高周波数成分画像を生成するステップと、抑制後の高周波数成分画像と低周波数成分画像を合成して結果画像を生成するステップを有する。
(もっと読む)
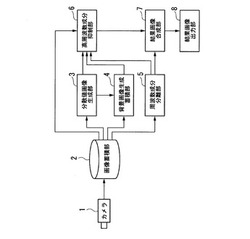
3次元環境復元装置、3次元環境復元方法、及びロボット

【課題】動的な環境下においても、効率的にマップ更新処理を可能とする。
【解決手段】3次元環境復元装置10は、環境を3次元で計測する環境認識センサ5と、計測された計測データから、観測物体の3次元形状を表す3次元点群を生成する3次元点群生成処理部11と、3次元環境を表現するデータ構造であって、当該3次元環境が格子領域に区切られて観測物体が存在する格子領域に直方体が配置された3次元環境マップを多段マップとして、生成された3次元点群データを用いて多段マップを時分割で生成し、当該生成した多段マップを記憶手段に規定時間分蓄積する時分割多段マップ生成/蓄積処理部12と、蓄積された規定時間分の多段マップと、新たに生成された多段マップと、を合成することで、新たな環境情報を反映させた全体多段マップを生成する全体多段マップ生成処理部13と、を備える。
(もっと読む)
画像処理装置及び画像処理プログラム
【課題】可動部を備える可動物体が風景画像に含まれている場合であっても、画像認識を適切に実行可能な画像処理装置を実現する。
【解決手段】可動物体特徴点群GAの基準撮影画像内での位置情報を含む参照データを格納する参照データベース92と、可動物体特徴点群GAが移動する可能性がある範囲を規定した情報を含む移動範囲データRを格納する移動範囲データベース93と、車載カメラによる風景の撮影画像である実撮影画像から実撮影データを生成する実撮影画像処理部と、実撮影データに含まれる対象特徴点群GCの配置が、参照データに含まれる可動物体特徴点群GAの配置を基準とする移動範囲データRに規定された範囲内である場合に、当該対象特徴点群GCを参照データに含まれる可動物体101と認識する画像認識部と、を備える。
(もっと読む)
画像処理装置
【構成】フラッシュメモリ40は複数の物体をそれぞれ表しかつ互いに異なる態様で変形された複数の辞書画像を保持し、CPU30は、複数の変形態様の各々に対応して指定画像を変形し、変形処理に係る変形態様に対応する辞書画像を保持された複数の辞書画像の中から選択する。CPU30はまた、選択された辞書画像に符合する部分画像を作成された変形画像から探索し、発見された部分画像に注目して既定処理を実行する。
【効果】探索性能が向上する。
(もっと読む)
車載警告装置
【課題】後続車両の急接近を自車両の運転者が気付いていないという状況をその運転者に的確に警告できる車載警告装置を提供すること。
【解決手段】リアカメラで自車両後方を撮像する(S11)。後方画像に含まれる後続車両の画像を抽出する(S12)。後続車両の画像の面積を算出する(S13)。その面積の時間変化の度合いAを算出する(S14)。変化度合いAが閾値A0より大きいか否かを判断する(S15)。大きい場合には(S15:YES)、最新の後続車両の画像の面積S1を算出する(S16)。面積S1が閾値S0より大きいか否かを判断する(S17)。大きい場合には(S17:YES)、車間距離が短い状態であるとして、その状態が5秒継続したか否かを判断する(S18、S19)。5秒継続した場合に(S19:YES)、運転者が後続車両の急接近に気付いていないとして、警告を行う(S20)。
(もっと読む)
点群データ処理装置、点群データ処理システム、点群データ処理方法、および点群データ処理プログラム
【課題】測定対象物の点群データからその特徴を抽出し、対象物の輪郭に係るデータを自動的かつ短時間に生成する技術を提供する。
【解決手段】測定対象物の二次画像と、この二次元画像を構成する複数の点の三次元座標データとを関連付けた点群データの中から、演算の負担の大きい非面領域に係る点群データ除去する非面領域除去部101と、非面領域のデータが除去された後の点群データに対して、面を指定するラベルを付与する面ラベリング部102と、ラベルが付与された面から連続した局所領域に基づく局所平面を利用して、対象物の輪郭線を算出する輪郭線算出部106を備える。
(もっと読む)
画像処理装置
【課題】本発明では、入射光量の少ない暗い領域であっても被写体となる対象物を逃すことなく検出することができる画像処理装置の提供を目的とする。
【解決手段】遠赤外線カメラは撮像領域内に存在し遠赤外線を放射する熱を持った物体を検出するためガラスに反射した映り込み光を画像として撮像することはないという性質を利用し、遠赤外線カメラから取得した遠赤外線画像と可視光カメラから取得した可視光画像を比較し、比較結果に基づいて映り込み部分の補正を行う。
(もっと読む)
情報処理装置、情報処理システム、及びプログラム
【課題】撮影された映像の視界空間上の座標に対して関連づけられたタグを用いることのできる情報処理システムを提供する。
【解決手段】情報処理装置100は、コンテンツを撮影する撮像装置の位置である視点位置の情報を取得する視点情報取得部121と、上記視点位置から上記コンテンツを撮影したときの視界空間を示す視界情報を取得する視界情報取得部122と、上記視点情報、上記視界情報、及び奥行き情報により特定される視界空間上の座標位置と関連づけられたタグの情報を生成するタグ情報生成部124とを有する。
(もっと読む)
画像処理装置、周辺監視システム、および、プログラム
【課題】高精度と高速性とを両立させた対応点探索を行う3次元画像処理技術を提供する。
【解決手段】撮像部2は、入射光量に応じて線形変換特性と対数変換特性との間で光電変換特性が切り換わるマルチモード撮影制御部201を備える。画像処理装置は、この撮像部2で撮像されたステレオ画像信号を入力し、当該ステレオ画像信号に含まれる複数の画像間の空間的対応関係を決定して撮像対象体の3次元画像情報を得る。撮像された画像のうち、線形変換特性で光電変換された領域については、高精度の第1の対応点探索方法を適用し、対数変換特性で光電変換された領域については、高速の第2の対応点探索方法を適用して、3次元画像情報を得る。画像領域の種類ごとに異なる特性の対応点探索方法を使い分けることによって、高精度と高速性とを両立させる。
(もっと読む)
来店者通知システム
【課題】多くの顔画像を取得することにより高い顔照合精度を有する来店者通報システムの提供を目的とする。
【解決手段】本発明の来店者通知システムは、撮像カメラ1で撮像した顔画像をデータベース12と照合し、登録された来店者である場合にそれを通知する来店者通知システムである。来店者通知システムは、撮像カメラ1の撮像画像を取得する画像取得部2と、撮像領域のうち1又は複数の所定領域を顔検出領域として設定する顔検出領域設定部3と、顔検出領域から顔画像を検出する顔検出部4と、顔検出部4で顔画像が検出された場合にのみ、画像取得部2が撮像画像を取得する速度を増加させる画像取得速度制御部5とを備える。
(もっと読む)
照合装置
【課題】2D照合の照合精度を高める。
【解決手段】2D照合顔画像作成部32において、照合対象領域AR1における顔M1の2次元画像を2D照合顔画像として作成する。規定情報取得部38において、3D照合顔画像作成部31で得られる照合対象領域の実際の大きさを規定する情報(例えば、カメラから顔までの実際の距離)を規定情報として取得する。正規化部37において、規定情報取得部38によって取得された規定情報に基づいて、2D照合顔画像の画像サイズ(顔画像サイズ)を正規化する。2次元照合部33において、正規化された2D照合顔画像の局所領域毎に、2D登録顔画像における対応する局所領域との照合を行う
(もっと読む)
顔画像合成装置
【課題】登録対象者が異なる表情をして写っている複数の顔画像から、照合に適した顔画像を合成可能な顔画像合成装置を提供する。
【解決手段】顔画像合成装置1は、対象者を撮影した複数の顔画像を3次元顔形状データにマッピングして各顔画像に対応する3次元顔モデルを作成するマッピング部53と、複数の3次元顔モデルのそれぞれを2次元に展開した展開顔画像を生成する展開顔画像生成部54と、複数の展開顔画像から少なくとも第1の展開顔画像と第2の展開顔画像を選択するとともに、予め設定された境界線候補の中から、顔の所定部位を回避する境界線候補を選択して合成境界に設定する顔画像選定部55と、第1の展開顔画像において顔のテクスチャ情報を有する第1の領域と第2の展開顔画像において顔のテクスチャ情報を有する第2の領域とを合成境界に基づいて合成し、合成顔画像を作成する顔画像合成部57とを有する。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】撮像状態により入力画像が変化しても高い精度で前景画像となる対象物のみを抽出する。
【解決手段】背景画像格納部29は、基準背景画像を格納する。対象物検出部25は、撮像部21により撮像された撮像画像から対象物を検出し、検出された対象物マスクを推定する。背景差分画像生成部22は、撮像画像と基準背景画像との画素間の差分からなる背景差分画像を生成する。破綻判定部24は、背景差分画像と、対象物マスクとに基づいて、背景差分画像が破綻しているか否かを判定する。破綻種別特定部26は、破綻の種別を特定する。基準背景更新部27は、破綻の種別に対応して基準背景画像を更新する。本発明は、画像処理装置に適用することができる。
(もっと読む)
画像処理装置及びプログラム
【課題】少ないメモリ容量及び計算量で、任意の場所であって任意の大きさの領域について積算値を求めることができるようにする。
【解決手段】小領域毎に、予め定められた原点と座標(x、y)を対角とする矩形領域内の画素値の総和を、座標(x、y)における積算値として、各画素について算出して、小領域毎に各画素の積算強度値を表わす第1積算値データを生成する。小領域の各々の原点に相当する座標の積算強度値を算出して、小領域の各々の原点に相当する座標の積算強度値を集めた第2積算値データを生成する。
(もっと読む)
撮像装置及び被写体検出方法
【課題】対象物体の認識精度を高めることができる撮像装置を提供する。
【解決手段】撮像手段により撮像された撮像画像から被写体を検出する検出手段と、撮像された画像から、被写体の特徴点を抽出する特徴点抽出手段と、撮像手段の撮像方向に対して被写体が向いている被写体方向を取得する方向取得手段と、被写体方向に応じて、特徴点40を補正する特徴点補正手段とを備え、検出手段は、特徴点補正手段により補正された特徴点40に応じて、前記被写体を検出する。
(もっと読む)
像変化判定装置、方法およびプログラム
【課題】非連続的に形成された静止物を解析対象として正確に移動体が移動しているか否かを判定する技術の提供。
【解決手段】車両の進行方向に沿って所定間隔で存在する静止物を視野に含む車載カメラによって所定の周期で撮影された複数の画像を示す画像情報を取得し、前記複数の画像に含まれる前記静止物の像が前記車両の周辺に存在する移動体の移動に起因して変化したか否かを判定する。
(もっと読む)
情報処理装置、プログラム及び情報処理システム
【課題】発生した異常の状態に応じて検出した情報を扱う。
【解決手段】情報処理システム1は、測定対象に付けられた検出対象物2と、検出対象物2を順次撮像する撮像装置4と、情報処理装置10を含む。情報処理装置10は、撮像装置4により順次撮像された撮像画像に基づいて、検出対象物2の位置情報を順次検出し、順次検出された位置情報の中から異常を示す位置情報を抽出し、抽出された位置情報が、1又は複数の異常の分類毎に定められた条件のいずれを満足するかに応じて、当該位置情報が示す異常の分類を判別し、判別した分類に定められた処理内容に従って上記抽出された位置情報を処理する。
(もっと読む)
多角度の特定物体の判断装置及び多角度の特定物体の判断方法
【課題】本発明は、多角度の特定物体の判断装置を提供する。
【解決手段】該装置は、画像データを入力する入力装置と、各々が、同一検知角度に対応する複数の分類器の多段接続からなる複数の多段接続分類器グループと、を有し、それぞれの分類器は、それぞれの特徴に対応しており、各分類器は、画像データの各特徴における各検知角度の特定物体に属する信頼度を算出し、該信頼度に基づいて該画像データが特定物体に属しているか否かを判断する装置であって、多段接続分類器グループの分類器間に、自己適応姿勢予測装置を設けて、該自己適応姿勢予測装置の前にある同一検知角度に対応されている各分類器により算出された信頼度から、画像データが該検知角度の該自己適応姿勢予測装置の後にある各分類器に入るか否かを判断する。本発明は、さらに多角度の特定物体の判断方法を提供する。
(もっと読む)
車両周辺監視装置
【課題】微分フィルタによるフィルタ処理を行った場合に生じ得る弊害を抑制した車両周辺監視装置を提供する。
【解決手段】赤外線カメラ1により撮像された原画像Im1に対して、微分フィルタによるフィルタ処理を施するフィルタ処理部13と、外気温Tsが温度範囲Tw内であるとき及び原画像Im1の輝度分散Lvが閾値Lv_th以下であるときは、原画像Im1に対してフィルタ処理部13によりフィルタ処理を実施して、フィルタ処理後画像Im2から歩行者の画像を検知し、外気温Tsが温度範囲Twから外れ且つ原画像Im1の輝度分散Lvが閾値Lv_thを超えているときには、フィルタ処理を禁止して原画像Im1から歩行者の画像を検知する対象物検知部14とを備える。
(もっと読む)
ナンバプレート読取装置およびナンバプレート読取方法
【課題】文字画像の解像度不足や文字が不鮮明であっても、その影響を低減してナンバプレート読取精度の向上が図れるナンバプレート読取装置を提供する。
【解決手段】車両が検知されると、撮像手段から得られるフレーム画像からナンバプレート内の解像度の高い文字のみを認識し、車両速度検出手段により検出された車両速度に基づき、車両が検知されてから当該車両のナンバプレートと撮像手段との距離が当該ナンバプレート内の解像度の低い文字を読取るのに最適となる距離になるまで当該車両が移動する時間を推定し、この推定された時間経過時、その前後フレーム近傍の複数フレームの画像を撮像手段から得られるフレーム画像から抽出し、この抽出された複数のフレーム画像を用いて当該ナンバプレート内の解像度の低い文字画像に対して高精細化処理を行ない、この高精細化された解像度の低い文字画像に対してのみ認識処理を行ない、この解像度の低い文字に対する認識結果と上記解像度の高い文字に対する認識結果とを統合する。
(もっと読む)
21 - 40 / 248
[ Back to top ]