
Fターム[5B057DA11]の内容
Fターム[5B057DA11]の下位に属するFターム
Fターム[5B057DA11]に分類される特許
41 - 60 / 248
車両周辺監視装置
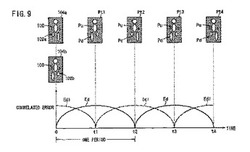
【課題】赤外線画像から自転車運転者を検出する車両周辺監視装置を提供する。
【解決手段】赤外線画像を2値化画像に変換し、基準テンプレート(104a)から領域(Pt1−Pt4)のそれぞれの相関誤差(Ed)を算出する。相関誤差(Ed)の振幅が周期的に変動しているとき、対象物が自転車運転者であると判定する。
(もっと読む)
動体検出装置および照明装置

【課題】検知エリアの照度が低い場合でも人体の検出を確実に行う。
【解決手段】動体検出装置2は、所定のエリアAに入った動体を検出する検出手段8と、少なくとも所定のエリアA内に放射光を照射する光源9と、検出手段8が動体を検出したときに光源9を点灯させる点灯制御装置10と、所定のエリアAの輝度分布を画像として出力するイメージセンサ11と、前記画像に基づいて、検出手段8で検出された動体が予め設定された検出目的物であるか否かを判断し、当該判断結果を出力する画像処理装置12を具備している。
(もっと読む)
画像処理装置、画像処理方法、及びプログラム
【課題】色変換処理に係るプロファイルを切り替える場合に、急激な色味の変化を抑制する。
【解決手段】現在のプロファイルと新たに設定されるプロファイルとの色差及び照明情報に基づいて、プロファイル切り替えの順応に要する順応時間を算出し、算出された順応時間において現在のプロファイルから設定されるプロファイルへ段階的に遷移していくプロファイルを適用することで、プロファイルの切り替え直後の急激な色味の変化を抑制できるようにする。
(もっと読む)
画像処理装置及び方法、データ処理装置及び方法、並びにプログラム
【課題】変換元となる画像の入力条件を緩和できる高精度かつ高ロバスト(頑健)な画像変換を実現する。
【解決手段】中間固有空間における学習画像係数ベクトルを取得し(#10,12)、中間固有空間において、学習画像係数ベクトルと入力画像係数ベクトルとの最短距離、方向、分布形状あるいは分布の広がりなどの相関関係に基づいて重み係数を決定する(#62)。この重み係数によってテンソル射影方式を用いたテンソル超解像処理と他の汎用超解像処理との採用比率を決定し、テンソル超解像処理により生成された第1超解像画像と(#30,34)、汎用超解像処理により生成された第2超解像画像と(#64)、を合成し(#66)、低画質の入力画像にから高画質画像(#36)を復元する。
(もっと読む)
画像検索システム及び画像検索方法
【課題】人物領域を厳密に検出せず、人物又は人物の特定の部位に依存しない検索キーによって、対象の人物を効率的に検索する。
【解決手段】ユーザによって指定された画像に類似する画像を検索する画像検索システムであって、カメラによって撮影された映像などから取得した画像を所定の大きさのブロックに分割し、色ヒストグラムに基づいて、ブロックの特徴量を抽出し、画像の識別子と、ブロックがどの位置にあるかを示す情報と、ブロックの特徴量と、の対応関係を示す第1の情報を作成し、第1の情報に基づいて、分割されたブロックのうち、ユーザによって選択された少なくとも一のブロックを第1の検索キーとし、第1の検索キーの特徴量と他のブロックの特徴量とを比較することによって、第1の検索キーに類似する所定の数のブロックを検索結果として検出し、検索結果を含む画像をユーザに表示する。
(もっと読む)
制御対象物抽出装置および車両制御装置
【課題】制御対象物抽出装置において、マンホール等、先行車両の陰に入りうる物体であって制御対象物とすべきでない物体を確実に制御対象物から除外することができる技術を提供する。
【解決手段】車両制御システムにおいては、不要物体判定処理にて、監視対象領域に存在する1または複数の物体のうちから自車両に対して先行して走行する先行車両を抽出し、監視対象領域のうちの自車両と先行車両との間の領域である車両間領域に位置する1または複数の物体である対象物候補を抽出する(S420,S440)。さらに、各対象物候補のうちの追跡が開始されてからの時間を表す追跡時間が予め設定された追跡基準時間以上である対象物候補を制御対象物として抽出するよう設定し、追跡時間が追跡基準時間未満である対象物候補を制御対象物として抽出しないよう設定する(S510,S530,S570,S590)。
(もっと読む)
3次元における形状の一致を判定する方法および装置
【課題】3次元における形状の一致を判定する方法および装置において、立体的形状に関する情報を有効に利用できるものを提供する。
【解決手段】判定装置10のカメラ制御手段33は、距離画像カメラ20によって判定対象の物体の距離画像を撮影する。特徴点抽出手段34は、この距離画像に基づいて特徴点を抽出する。特徴量決定手段35は、特徴点近傍の立体的形状を表面点の深さとして算出し、表面点の深さに基づいて特徴点の特徴量を決定する。一致判定手段36は、2つの形状の特徴量に基づき、これらの形状の一致を判定する。
(もっと読む)
人物追跡装置、人物追跡方法及びプログラム
【課題】人物の向き等に関わらず、高速かつ高精度に人物追跡を行うことができる。
【解決手段】動画の各フレームの画像について、顔検出部で顔検出処理を行うか、人物マッチング部でテンプレートマッチングを行うかを判断する(ステップS11)。例えば、顔検出部で処理を行っている場合は人物マッチング部で処理を行うとし、顔検出部で処理を行っていない場合には顔検出部で処理を行うとする。顔検出部で処理を行う場合(ステップS11でYES)には、画像に対して顔検出フルサーチ処理を行って顔領域を検出し(ステップS12)、当該フレームの直近のフレームから検出された顔との同一性を検証する(ステップS13)。人物マッチング部で処理を行う場合(ステップS11でNO)には、顔検出フルサーチ処理が行われた直近のフレームから検出された顔領域をテンプレートとしてテンプレートマッチングを行い、顔領域を検出する(ステップS14)。
(もっと読む)
画像処理装置および方法、並びに、プログラム
【課題】車両の周囲の物体の検出精度を向上させる。
【解決手段】監視部201N乃至201Rの挙動推定部212N乃至212Rは、それぞれ、車両の周囲の異なる方向を撮影した画像を用いて、車両の挙動を表す挙動パラメータを推定する。設定部222は、挙動推定部212N乃至212Rのそれぞれで推定された複数の挙動パラメータに基づいて、車両の周囲の障害物の検出に用いる挙動パラメータを設定する。監視部201N乃至201Rの障害物検出部213N乃至213Rは、それぞれ、車両の周囲の異なる方向を撮影した画像、および、設定された挙動パラメータを用いて、車両の周囲の障害物を検出する。本発明は、例えば、車載用の監視装置に適用できる。
(もっと読む)
画像処理システム
【課題】車載ネットワーク上に車載カメラおよび複数の画像認識部が接続された画像処理システムにおいて、画像認識部が画像認識処理をするための前処理を省くことが可能となる技術を提供する。
【解決手段】画像処理システムにおいて、車載ネットワーク上の車載カメラは画素値がRGB表色系で表される画像を撮影する。主成分算出部は撮影したフレーム画像に対して主成分分析を行い、変換行列を求める。画素値変換部は変換行列と各画素のRGB画素値から第1〜第3主成分得点を取得し、少なくとも第1主成分得点を車載ネットワークに配信する。画像認識部はコントラストが強調された第1主成分得点に基づいて画像認識を行い、必要な後続処理を実行する。
(もっと読む)
情報処理装置および方法、プログラム、並びに記録媒体
【課題】姿勢を推定することができるようにする。
【解決手段】シルエット抽出部12は、入力された画像内の被写体のシルエットを抽出し、輪郭抽出部13は、そのシルエット画像から被写体の輪郭を抽出する。特徴量抽出部14は、輪郭線からサンプル点を抽出し、サンプル点毎に特徴量を抽出する。マッチング部101は、姿勢記憶部16に記憶されている複数の姿勢毎の特徴量と、特徴量抽出部14で抽出された特徴量を用いてマッチングを行い、最尤姿勢の情報を出力する。フィッティング部102は、推定された姿勢と入力画像に対してフィッティングの処理を施し、点間の距離を求め、精度判定部103に出力する。精度判定部103は、フィッティング部102からのデータを基に、マッチング部101で推定された姿勢の精度を判定する。本発明は、ジェスチャーなどを判断する情報処理装置に適用できる。
(もっと読む)
デジタルカメラ
【課題】写体人物の全員を同様の表情で撮像することが容易に行えるようにする。
【解決手段】撮像を行って画像データを取得し、その画像データに対して顔認識および表情認識を行う。画像データ中に複数の顔が検出された場合は、全員が笑顔で、かつ全員がカメラに視線を向けるまで撮像を繰り返し、全員が笑顔で、かつ全員がカメラに視線を向けるとその画像データを記録媒体に記録する。
(もっと読む)
画像修正装置およびデジタルカメラ
【課題】被写体画像中の人物の白目、歯および白髪を簡便に色修正すること。
【解決手段】顔表情検出部23は、被写体画像中の被写体人物の笑顔を検出し、画像記録部16は、その被写体画像データと、笑顔であるとの属性データとを関連付けてメモリ16aに記録する。顔表情として笑顔を設定すると、画像読出し部20は、メモリ16aの被写体画像データの中から、被写体人物が笑顔である被写体画像データを読み出し、読み出された被写体画像データの人物画像について、白目領域検出部27a、歯領域検出部27bおよび白髪領域検出部27cは、それぞれ白目、歯および白髪の画像領域を検出し、色修正部31は、白目、歯については白色補正、白髪については黒色補正を行う。
(もっと読む)
3次元物体姿勢・位置検出装置、方法、およびプログラム
【課題】参照点等を与えることなく、3次元物体の位置(撮影したカメラから3次元物体の予め定められた点までの距離)を高精度に検出することを可能とした3次元物体姿勢・位置検出装置を提供することである。
【解決手段】提案する3次元物体姿勢・距離位置装置では、2次元画像の対象物中心点の位置を、その2次元画像と、その2次元画像の姿勢に加えた組み合わせとして作成した辞書データを記憶装置8内に有するために、事前に参照点や図形を辞書データの各2次元画像に入力することなく、また、ステレオカメラ16−1、16−2を用いることにより、認識対象の3次元姿勢および対象物中心点までの距離を容易に認識することができる。
(もっと読む)
接近物体検出装置、接近物体検出プログラム、接近物体検出方法
【課題】接近物体の検出の精度を向上させる接近物体検出装置、接近物体検出プログラム、接近物体検出方法を提供する。
【解決手段】接近物体の検出を行う接近物体検出装置であって、撮影された第1画像と第1画像より前に撮影された第2画像とを取得する画像取得部と、画像取得部により取得された第1画像及び第2画像に基づいて、第2画像内の第2点に対応する第1画像内の第1点を検索する検索部と、検索部により検索された第2点から第1点へのオプティカルフローを算出するオプティカルフロー算出部と、オプティカルフロー算出部により算出された第2点から第1点へのオプティカルフローの鉛直成分に基づいて、該第1点が接近物体を示すか否かを判定する判定部とを有する。
(もっと読む)
画像管理装置、その制御方法及びプログラム
【課題】写真等の画像の公開レベル設定を、利用者に手間をかけさせずに適切に行う。
【解決手段】画像を入力する画像入力手段10100と、入力された画像から人物を検出する人物検出手段10200と、人物検出手段10200による人物検出結果に基づいて前記画像の公開レベルを決定する公開レベル決定手段10300と、を有することを特徴とする。
(もっと読む)
車両用落下物検出装置
【課題】先行車両による落下物の落下を後方車両の乗員が把握していなくても、回避を容易にする車両用落下物検出装置を提供すること。
【解決手段】前方を繰り返し撮影する撮影手段11と、走行状態を検出する走行状態検出手段14と、先行車両を特定する先行車両特定手段15と、画像データを画像処理して水平ラインを検出し、水平ラインが検出された画像データを時系列に複数個記憶する画像データ記憶手段13と、物体が水平ラインを横切る画像データをトリガーに、画像データが含む水平ラインAと、該画像データよりも後に撮影された画像データが含む水平ラインAよりも下方の水平ラインBとの間の距離、及び、2つの画像データの撮影間隔から、物体が下方に移動する速度を算出して、物体が自由落下する落下物である確度を数値化する数値化手段15と、数値化された確度が閾値より大きい場合、運転者に警告する警告手段16と、を有することを特徴とする。
(もっと読む)
画像処理装置
【構成】イメージャ16から出力された被写界像は、メモリ制御回路30によってSDRAM32に取り込まれる。CPU26は、取り込まれた被写界像から1または2以上の顔画像の集合を検出し、検出された顔画像の集合の規模に基づくサイズを有する切り出しエリアを、検出された顔画像の集合を覆うようにSDRAM32に定義する。CPU26はまた、定義された切り出しエリアに属する一部の被写界像をSDRAM32に取り込まれた被写界像から切り出す。
【効果】顔画像の集合に対する背景画像の割合が適応的に調整され、被写界像の再現性が向上する。
(もっと読む)
周辺監視装置
【課題】道具を利用して移動する道具利用者と歩行者とを区別して認識することができる周辺監視装置を提供する。
【解決手段】周辺監視装置1は、レーザーレーダーセンサ2、カメラセンサ3及びECU4を備えている。センサ2,3では、車両10周辺の物体11の形状を認識する。ECU4では、形状認識結果に基づいて人候補の有無を判定し、その人候補の動作を算出し、そして、算出した動作に基づいて遊具利用動作の有無を判定し、遊具利用動作がありと判定された場合には、人候補を、遊具を利用して移動する遊具利用者H2として検出する。周辺監視装置1によれば、道具利用者H2を歩行者H1と区別して検出し認識することができる。
(もっと読む)
車両用画像処理装置
【課題】輝度情報が変化しても、正確にテンプレートをマッチングさせることにより、対象物を認識することが可能な車両用画像処理装置を提供する。
【解決手段】外界カメラ2と、第1画像に基づいて対象物のテンプレートを作成するテンプレート作成部32と、第1画像と第2画像の撮像時における光源の位置を推定する光源位置推定部35と、第1画像と第2画像の撮像時における外界カメラ2と対象物との位置関係を推定する対象物位置算出部39と、位置関係及び光源位置に基づいて、第1画像中の対象物と第2画像中の対象物との間の輝度変化を推定する輝度変化量推定部40と、輝度変化によりテンプレートの輝度を補正した補正テンプレートを作成するテンプレート輝度変換部41と、補正テンプレートより第2画像に対してテンプレートマッチング処理を行い対象物を検出するテンプレートマッチング処理部42とを備えた。
(もっと読む)
41 - 60 / 248
[ Back to top ]