
Fターム[5B057DA12]の内容
Fターム[5B057DA12]に分類される特許
101 - 120 / 2,013
画像表示装置、画像表示方法、および画像表示用プログラム
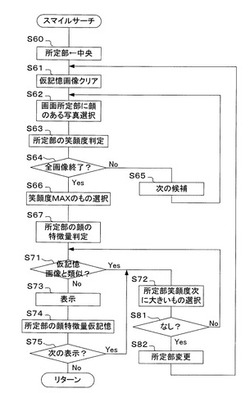
【課題】複数の画像の中から画像を検索して表示するにあたって、迅速に検索を行うことのできる画像表示装置、画像表示方法、および画像表示用プログラムを提供する。
【解決手段】複数の画像のそれぞれの画面中央に位置する顔の笑顔度を判定し(S63)、この判定した笑顔度に基づいて、複数の画像の中から代表画像を検索し表示を行うようにしている(S73)。また、代表画像の検索にあたって、S71で笑顔度に加えて類似画像は排除している(S71)。
(もっと読む)
DTM推定方法、DTM推定プログラム及びDTM推定装置、並びに、3次元建物モデルの作成方法

【課題】LiDARデータに基づいて推定されるDTMの精度を高める。
【解決手段】航空機による地表のレーザースキャナーデータに基づいて、その所定範囲について地表面のみの標高データであるDTMを推定するDTM推定方法であって、所定範囲における単位グリッド内にデータが存在しない画素を連結して河川領域を抽出し、河川領域を除くデータについて、第1の最大許容傾斜値(例えば3度)を設定して暫定的なDTMを推定し、推定したDTMから局所的な傾斜を計算し、傾斜が所定値を超える場合は、第1の最大許容傾斜値より大きい第2の最大許容傾斜値(例えば4.5度)を設定して再度DTMを推定する。
(もっと読む)
処理装置、処理システム、処理方法、プログラム
【課題】ユーザが操作を行うことなく、装置内に保存していたデータを送信すること。
【解決手段】本発明の処理装置は、第1のデータを受信する受信部と、第2のデータを保存する記憶部と、前記記憶部に保存された第2のデータの中から、前記受信部で受信された第1のデータに関連する第2のデータを抽出する抽出部と、前記抽出部で抽出された第2のデータを、前記受信部で受信された第1のデータに関連する装置に送信する送信部と、を含む。
(もっと読む)
画像生成装置
【課題】認識された立体物と、当該立体物の撮影画像である立体物画像の領域に合成される代替画像との視認性を高めること。
【解決手段】車両の周辺領域を撮影する車載カメラによって取得された撮影画像を上方仮想視点で射影変換することで生成される俯瞰画像を表示画像として出力する画像生成装置。周辺領域に存在する立体物を認識して当該立体物の属性を示す立体物属性情報を出力し、この立体物属性情報に含まれている位置情報に基づいて撮影画像における立体物の画像領域である立体物画像領域を決定し、立体物属性情報に含まれている種別情報と姿勢情報とに基づいて特定された立体物の特定された向き姿勢での代替画像を出力し、この出力された代替画像が立体物画像領域の位置に合成された代替画像付き俯瞰画像が生成される。
(もっと読む)
表示制御装置および方法、プログラム、並びに記録媒体
【課題】画面に複数の視点を切り替えて表示させる場合に、できるだけ早く表示遷移を完了させるとともにユーザの操作性を向上させることができるようにする。
【解決手段】複数のカメラにより撮影された画像をそれぞれ取得し、前記取得した画像のうちの所定の画像に表示されている特定のオブジェクトを検知し、前記取得した複数の画像において、前記特定のオブジェクトが検知された前記所定の画像とは異なる別の画像で同一のオブジェクトが検知された場合、前記別の画像のオブジェクトの表示の形態を前記所定の画像のオブジェクトを基準として設定し、同一の画面に表示するように制御する。
(もっと読む)
画像処理装置、画像処理方法およびプログラム
【課題】飲食物を摂取した場合の具体的な予測イメージを得る。
【解決手段】データ取得部110が、飲食物に関する飲食物データを取得し、画像取得部120が、利用者の画像を取得し、表示部130が、画像取得部120が取得した利用者の画像を表示し、データ取得部110が取得した飲食物データに基づいて、表示部130が表示している利用者の画像を、画像変形部140が変形させる。
(もっと読む)
画像処理装置、情報生成装置、画像処理方法、情報生成方法、制御プログラムおよび記録媒体
【課題】様々な形状に変化する物体であっても、画像上における物体の形状を高精度に検出する。
【解決手段】画像から物体の部位点を検出する部位点検出装置1であって、画像上に部位点に対する基準点を特定する基準点特定部23と、基準点に対する複数のサンプリング点毎に、サンプリング点の画素または画素群から特徴量を抽出し、抽出した各サンプリング点にそれぞれ対応する複数の特徴量から構成される、基準点に対する特徴量群を抽出する特徴量抽出部26と、複数のサンプリング点の各画素または各画素群から抽出された基準点に対する特徴量群と、基準点に対する部位点の相対位置を示す位置情報との対応関係を示すLRF関数を参照して、特徴量抽出部26が抽出した特徴量群に対応する位置情報を特定する位置情報特定部29と、位置情報特定部29が特定した位置情報の示す位置を物体の部位点とする部位点特定部30とを備える。
(もっと読む)
画像生成装置
【課題】認識された立体物と、当該立体物の撮影画像である立体物画像の領域に合成される代替画像との視認性を高めること。
【解決手段】画像生成装置であって、車両の周辺領域に存在する立体物を認識して当該立体物の属性を示す立体物属性情報を出力し、立体物属性情報に含まれている位置情報に基づいて撮影画像における立体物の画像領域である立体物画像領域を決定し、立体物属性情報に含まれている色情報に基づく色で色付けられた立体物の代替画像を、立体物属性情報に含まれている種別情報に基づいて出力し、立体物画像領域の位置に代替画像出力部から出力された代替画像が合成されている代替画像付き俯瞰画像を生成する画像合成部を備えている。
(もっと読む)
情報処理装置、情報処理装置の制御方法及びその制御プログラム、情報処理システム、情報処理方法
【課題】すべての者を警告の出力対象とし、あらかじめ登録された者を認証することができた場合に限り例外的に警告を発報しないことで、施設外に出る者を漏らさずチェックすること。
【解決手段】あらかじめ定められた第1の場所を通過した人の行動を判定する行動判定手段と、行動判定手段で判定した結果に応じて、警告情報を生成する生成手段と、人情報データベースにあらかじめ登録された人情報を用いて、あらかじめ定められた第2の場所を通過した人が警告対象か否か認証する人認証手段と、人認証手段による認証結果に応じて、生成手段が生成した警告情報の出力を規制する規制手段と、警告情報を出力する出力手段と、を備えたことを特徴とする。
(もっと読む)
画像形成装置及び照合方法
【課題】無駄な照合処理を抑制する画像形成装置及び照合方法を提供する。
【解決手段】本発明の実施形態における画像形成装置は、画像データ記憶部と、複数の画像のパターンデータ及び前記パターンデータの回転対称情報を関連付けて記憶するパターンデータ記憶部と、前記パターンデータ記憶部から前記パターンデータ及び前記回転対称情報を読み出すアドレスを生成し、前記パターンデータ記憶部から出力された前記回転対称情報に基づき回転した前記パターンデータを選択する回転制御信号を生成する生成部と、前記パターンデータ記憶部から出力された前記パターンデータの回転データを作成し、前記回転制御信号から、照合する前記パターンデータを選択して、照合用パターンデータを出力するデータ回転処理部と、前記画像データ記憶部から出力される前記画像データと、前記照合用パターンデータを照合しその結果を出力する照合部と、を備える。
(もっと読む)
人物属性推定システム、人物属性推定装置、及び人物属性推定方法
【課題】 環境依存属性によらずに推定精度を向上できる人物属性推定システムを提供する。
【解決手段】 人物属性推定システムとしての年齢性別推定システム10は、属性推定対象の人物を撮影して画像を生成する監視カメラ11と、推定パラメータを用いて、監視カメラ11が生成した画像に写っている人物の属性を推定する年齢性別推定部122と、監視カメラ11の設置環境に依存する属性である環境依存属性を指定する環境依存属性指定部124とを備え、年齢性別推定部122は、環境依存属性空間において、環境依存属性指定部124にて取得した環境依存属性から所定の距離内にある環境依存属性を有する学習データに基づいて生成されたパラメータを推定パラメータとして用いる。
(もっと読む)
情報処理装置、情報処理方法及び制御プログラム
【課題】商品知識が少なく、作業慣れをしていない店員であっても、決済端末装置における登録を容易かつ迅速に行える。
【解決手段】商品を含む画像を撮像して撮像画像データを出力する撮像手段と、商品を認識し、識別するための識別用データと、商品に関する商品情報と、を対応づけて予め記憶した商品識別用データベースと、前記撮像画像データに対応する画像に含まれる商品の特徴量を抽出し、前記商品識別用データベースに記憶されている識別用データを参照して、前記画像に含まれる一または複数の商品を特定し、特定した商品に対応する商品特定情報を出力先の決済端末装置が読取可能なフォーマットで出力する商品特定情報出力手段と、を備える。
(もっと読む)
注視者検知装置
【課題】 対象物を注視する注視者数を正確に計測する。
【解決手段】 この発明に係る注視者検知装置は、画像データに映った人物の顔を検出し、顔情報データを生成する顔検出部と、この顔検出部が生成した顔情報データを記録する顔検出状況記録部と、所定の単位時間ごとに注視判定指示を発行する注視判定指示部と、この注視判定指示部が注視判定指示を発行したとき、前記顔検出状況記録部が記録する顔情報データの人物による注視時間を計測する注視判定部と、この注視判定部で計測された顔情報データの人物による注視時間を記録する注視時間記録部と、この注視時間記録部に記録された注視時間が注視規定時間を超えた顔情報データの人物を注視者として注視者数を集計する注視者数集計部とを備えた。
(もっと読む)
最適化された純度による欠陥分類
【課題】自動検査、特に、製造欠陥の解析の方法及びシステムを提供する。
【解決手段】欠陥解析方法は、検査パラメータ値のそれぞれの範囲によって特徴付けられる複数の欠陥部類に対する単一部類分類子を識別する段階を含む。各単一部類分類子は、それぞれの部類に対して、検査パラメータ値に基づいてそれぞれの部類に属する欠陥を識別し、一方でそれぞれの部類に入っていない欠陥を未知欠陥として識別するように構成される。検査パラメータ値に基づいて複数の欠陥部類のうちの1つに各欠陥を割り当てるように構成された多重部類分類子が識別される。検査データが受信され、欠陥を欠陥部類のうちの1つに割り当てるために、単一部類及び多重部類分類子の両方が適用される。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】被写体が撮影されたときの状況に適した画像補正処理を行う。
【解決手段】特徴量導出部102は、撮影記録して得られた入力画像データにより形成される画像に関して、彩度別に入力画像データ中の画素を分類して得られた彩度特性と、明度別に入力画像データ中の画素を分類して得られた明度特性と、入力画像データ中で検出されたエッジ数およびエッジ位置に基づくエッジ特性とを特徴量として導出する。処理適性指標導出部106は、入力画像に含まれる同一の画素に対して彩度低減とシャープネス増加との両方を行う処理である特定処理を入力画像データに施すことに対する適性指標である処理適性指標を上記特徴量に基づいて導出する。画像補正処理部110は、処理適性指標に基づいて特定処理を施す。
(もっと読む)
データ処理装置、データ処理装置の制御方法、およびプログラム
【課題】パラメータのプリフェッチ効率を上げ、処理時間を短くする。
【解決手段】複数の入力データのそれぞれに対して辞書データを参照して入力データの所定領域ごとに1または複数の照合処理を順次行い、対象物体を認識するデータ処理装置であって、照合処理で参照する辞書データを取得する取得部と、取得部により取得された辞書データを複数保持可能な保持部と、保持部により保持された1つの辞書データを参照して入力データに対して照合処理を行う演算部と、演算部による処理結果を保持する履歴保持部と、演算部が後続の照合処理で参照する辞書データを、後続の照合処理の前に予め取得部が取得して保持部に保持するプリフェッチ処理を行うか否かを、処理結果に基づいて判定するプリフェッチ判定部と、プリフェッチ処理を行うと判定された場合に当該プリフェッチ処理を行う処理部と、を備える。
(もっと読む)
環境認識装置および環境認識方法
【課題】夜間や雨等、光源が拡散し易い環境において、壁でないものを壁と誤判断することを抑制する。
【解決手段】環境認識装置130は、検出領域内に存在する対象部位の、自車両に対する相対距離を含む位置情報を取得する位置情報取得部160と、自車両の進行方向に垂直な水平距離の差分および自車両の進行方向に平行な相対距離の差分が第1所定距離内に連なる複数の対象部位をグループ化して対象物とするグループ化部162と、対象物を構成する複数の対象部位が、自車両の進行方向に垂直な面に対して所定角度以上に傾斜する傾斜面を形成すると、壁の候補である壁候補と判断する候補判断部164と、自車両の進行方向に垂直な水平距離の差分および自車両の進行方向に平行な相対距離の差分が、第1所定距離より長い第2所定距離内に連なる複数の壁候補を、壁であると判断する壁判断部166と、を備える。
(もっと読む)
画像処理装置及び方法
【課題】複数の画像処理の組み合わせにより目的領域を画像内から抽出する技術に関し、操作者が画像処理手順を入力しなくても、自動的に画像処理手順を設定可能にする。
【解決手段】処理対象画像に対する直前回までに適用された画像処理結果の履歴に基づいて、次回以降に実行する画像処理の内容を自動的に決定する。
(もっと読む)
画像認識装置、画像認識装置の制御方法、およびプログラム
【課題】登録データ量が少なくても高精度に認識できる画像認識装置およびその制御方法を提供する。
【解決手段】辞書データとの照合により画像から対象物体を認識する画像認識装置であって、1以上の画像を取得する取得部と、画像のそれぞれから対象物体画像を検出する検出部と、対象物体画像から1以上の局所領域を切り出す切り出し部と、1以上の局所領域のそれぞれから対象物体を認識するための特徴量を画像ごとに算出する特徴量算出部と、画像ごとに算出された特徴量同士の類似度を局所領域ごとに算出する類似度算出部と、類似度が閾値以上となる特徴量同士がある場合には一方の特徴量を対象物体に対する辞書データとして局所領域ごとに登録する登録部と、を備える。
(もっと読む)
環境認識装置および環境認識方法
【課題】対象物の規則性に基づいて対象物の特定精度を向上し、誤認識を回避する。
【解決手段】
環境認識装置130は、対象部位の輝度から、対象部位に対応する特定物を仮決定し(S302)、水平距離の差分および高さの差分が第1所定範囲内にある、同一の特定物に対応すると仮決定された対象部位をグループ化して対象物とし(S304)、任意の対象物から、水平距離の差分、高さの差分、および、相対距離の差分が第2所定範囲内にある、同一の特定物に対応すると仮決定された対象物を順次検出し、対象物群を特定し(S306)、対象物群における対象物の数に応じて対象物群が特定物であるか否かを決定する(S308)。
(もっと読む)
101 - 120 / 2,013
[ Back to top ]