
Fターム[5B057DA15]の内容
Fターム[5B057DA15]に分類される特許
101 - 120 / 897
画像処理装置、画像形成装置、原本判定方法、画像形成方法
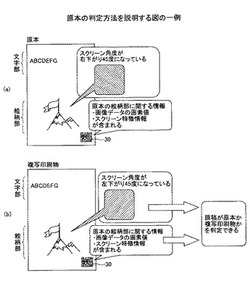
【課題】コスト増を抑制して、原稿の原本性を確認可能な画像処理装置を提供することができる。
【解決手段】原稿を読み取り画像データを生成する画像処理装置100であって、前記画像データから情報記録マーク30を抽出して情報記録マークに符号化されている、前記画像データの原本である原稿の画像データ情報を復号化する復号化手段31と、前記画像データから中間調処理が施された中間調領域を抽出する中間調領域抽出手段34と、前記画像データ情報に基づき、前記中間調領域の読み取り画像データと、原本の前記中間調領域の原本画像データの一致度を算出する一致度算出手段32,35と、前記一致度に基づき、前記画像データの原稿が原本か否かを判定する原本判定手段33と、を有することを特徴とする。
(もっと読む)
車両用障害物検出装置

【課題】カメラレンズに付着した異物等を検出対象の範囲から除外して、障害物の検出精度を向上できる「車両用障害物検出装置」を提供することである。
【解決手段】車両の周囲の障害物検出領域を撮影するカメラと、カメラが撮影した障害物検出領域の画像に基づいて車両の周囲に障害物が存在するか否かを判定する障害物判定手段とを備えた車両用障害物検出装置であって、カメラが撮影した障害物検出領域内の変化しない部分である不動領域を検出する不動領域検出手段(S15)と、不動領域検出手段により検出された不動領域から検出不可領域を決定する検出不可領域決定手段(S16)と、検出不可領域決定手段により決定された検出不可領域を障害物検出領域から除外する検出不可領域除外手段(S18)とを備える。
(もっと読む)
運転支援装置
【課題】障害物画像および走行予想進路を視認しやすく表示することができる運転支援装置を提供する。
【解決手段】車両後方表示装置10は、ソナー17が障害物20を検出した場合には、進路画像29の表示を停止し、障害物20を検出したことを示す障害物画像30を撮影画像23aに重畳して表示するように演算装置16および描画装置13によってディスプレイ12が制御される。障害物20を検出した場合には、進路画像29を非表示にすることによって走行予想進路がわからなくなるが、車両の進行を妨げる障害物20がある場合には、進路画像29を表示する必要性が低いので、障害物20を検出したことの方が進路画像29を表示することよりも優先すべき事項である。このように優先すべき障害物画像30を表示することによって、障害物画像30を視認しやすくすることができる。
(もっと読む)
画像処理装置および画像処理方法
【課題】立体画像の鑑賞に伴うユーザの負担を軽減する技術を提供する。
【解決手段】定位エラー判定部502は、被写体の左目用の視差画像と右目用の視差画像とを含む立体画像を表示デバイスに表示するのに先立って、当該左目用の視差画像と右目用の視差画像とが3次元の画像として定位する立体画像であるか否かを判断する。視差エラー判定部504は、左目用の視差画像と右目用の視差画像とが立体画像として定位すると判断された場合、その視差画像間の視差分布のレンジが、所定の視差レンジの範囲内となるか否かを判断する。エラー通知部506は、左目用の視差画像と右目用の視差画像とが、立体画像として定位しないと判断されるか、両画像の視差分布のレンジが視差レンジの範囲を外れると判断されるか、の少なくとも一方に該当する場合、その旨を通知する。
(もっと読む)
撮像装置及び撮像方法
【課題】操作者のジェスチャに応じた撮影制御を行う際に、操作者の存在位置の制約を減少させる。
【解決手段】画像データを取得する複数の撮像部と、複数の撮像部のそれぞれの撮像方向と撮像画角の少なくとも一方を個別に変更して撮像範囲を変更する撮像範囲変更部と、いずれか1つの撮像部が取得した画像データから操作者のジェスチャを検出するジェスチャ検出部と、検出されたジェスチャに応じて、記録すべき撮像範囲の変更制御及び複数の撮像部に対する撮影指示を含む撮像制御を行う撮像制御部とを備え、撮像制御部は、記録すべき撮像範囲の変更制御に際して、撮影範囲変更手段を制御して、複数の撮像部のうちの一部の撮像部である本撮像部の撮影範囲をジェスチャ検出部で検出したジェスチャに応じて変更させるとともに、本撮像部の撮像範囲から操作者が含まれなくなる場合は本撮像部以外の撮像部の撮像範囲の変更を操作者が含まれる範囲に制限する。
(もっと読む)
車両用顔画像撮像装置
【課題】チルト機構によるステアリングホイールの鉛直方向の角度調整に拘らず、常に運転者の顔の正面を適切に撮像することのできる車両用顔画像撮像装置を提供する。
【解決手段】ステアリングホイール13はチルト機構15によって鉛直方向の傾斜角度を調整可能とされている。ステアリングホイール13よりも前方側には、運転者mの顔を撮像するCCDカメラ20と、視線方向の検知のために運転者mの眼球に光を照射する近赤外線LED21を設置する。CCDカメラ20は、ステアリングホイール13の正面視において、ステアリングホイール13の中心軸線Aの鉛直上方で、かつ、チルト機構15によりステアリングホイール13が上限位置に変位したときにステアリングホイール13の上端部13aよりも鉛直上方となる位置に配置する。
(もっと読む)
撮像装置及び撮像方法
【課題】操作者のジェスチャに応じた撮像制御を行う際に、操作者の存在位置の制約を減少させた撮像装置及び撮像方法を提供する。
【解決手段】操作者のジェスチャに応じた撮像を行う撮像装置であって、所定の撮像範囲の画像データを取得する撮像部と、撮像部の撮像方向と撮像画角の少なくとも一方を変更して撮像範囲を変更する撮像範囲変更部と、撮像部で取得した画像データから、操作者のジェスチャを検出するジェスチャ検出部と、検出されたジェスチャに応じて、記録すべき撮像範囲の変更制御、及び撮像部に対する撮像指示を含む制御を行う撮像制御部と、を備え、撮像制御部は、変更制御に際して、撮像範囲の変更を優先して行う主変更制御と、撮像範囲に操作者が含まれる範囲内で撮像範囲変更部による撮像範囲の変更を行う代替変更制御とを切換えて行い、主変更制御を行った場合に撮像部の撮像範囲内に操作者が含まれなくなるときは、代替変更制御によって撮像部の撮像範囲を変更する。
(もっと読む)
車両用顔画像撮像装置
【課題】検出精度の低下に対する誤報知を抑制する。
【解決手段】車両用顔画像撮像装置10は、乗員カメラ11から出力された顔画像から所定部位を検出して検出結果を出力する部位検出部23と、部位検出部23により所定部位の検出が不可能である場合に運転者に報知を行なう報知制御部30および報知装置14と、顔画像の輝度分布を算出する輝度分布算出部25と、太陽光の車両への入射方向を取得する入射方向取得部27と、所定の輝度分布と所定の入射方向との対応関係を予め記憶する記憶部29とを備える。報知制御部30は、輝度分布算出部25により算出された輝度分布と入射方向取得部27により取得された入射方向との対応関係が、記憶部29に記憶されている対応関係と一致した場合に報知を行なう。
(もっと読む)
監視システム及び人物特定方法
【課題】個人認証方法の改善と、認証対象の人物の具体的な行動を管理するための仕組みを実現する。
【解決手段】実施形態によれば、監視システムは、認証コントローラと、画像認識サーバとを備えた構成である。認証コントローラは、電界通信により認証用端末から受信した認証用情報に基づいて認証処理を実行する。画像認識サーバは、カメラにより撮影された撮影領域の画像を取得し、前記撮影領域に含まれる人物を認識する。画像認識サーバは、認証用端末の位置情報とカメラの撮影領域の座標情報に基づいて、画像認識された人物と前記認証コントローラにより認証された人物とを照合する人物特定処理を実行する。
(もっと読む)
異常走行車両検出システムおよび道路監視プログラム
【課題】道路および車両に特別な設備や機能をもたせることなく、道路を走行する車両の異常走行を一定の精度で検出し外部に報知することのできる異常走行車両検出システムおよび道路監視プログラムを提供する。
【解決手段】異常走行車両検出処理部13−16は、上記キャプチャ部12が取り込んだフレーム単位の画像を一定の周期で入力し、入力した現在画像と過去画像を差分処理して変化画素領域を矩形の領域として抽出し、抽出した矩形の領域を処理対象オブジェクトとして上記一定の周期毎に追跡し、追跡している処理対象オブジェクトが予め設定された監視対象オブジェクトであるか否かを判定して、判定した監視対象オブジェクトについて追跡情報と設定情報とをもとに当該オブジェクトが予め設定された異常走行パターンに合致する走行状態にあるか否かを判定する。
(もっと読む)
移動距離検出装置及び移動距離検出方法
【課題】移動距離の算出精度を向上させることが可能な移動距離検出装置及び移動距離検出方法を提供する。
【解決手段】移動距離検出措置1は、所定領域を撮像するカメラ10と、カメラ10の撮像画像のデータを入力する計算機30とを備えている。計算機30は、カメラ10による撮像にて得られた所定領域の画像を鳥瞰視される状態へ視点変換し、視点変換された異なる時刻の鳥瞰画像データの位置を合わせる。また、計算機30は、位置合わせされた鳥瞰画像データの差分画像データに基づいて、立体物を検出する。また、計算機30は、視点変換により立体物が倒れ込む方向に沿って、差分画像データ上において所定の差分を示す画素数をカウントして度数分布化することで差分波形を生成し、当該差分波形の時間変化から立体物の移動距離を算出する。
(もっと読む)
逆変換テーブル生成方法、逆変換テーブル生成プログラム、画像変換装置、画像変換方法、及び画像変換プログラム
【課題】所定の画像に対して視点変換を行う前の画像を取得することを可能とする逆変換テーブル生成方法を提供する。
【解決手段】本逆変換テーブル生成方法は、視点変換画像から当該視点変換画像に係る視点変換処理が行われる前の画像を逆変換画像として生成するための逆変換テーブルT1を生成するための方法であって、制御部11により、視点変換テーブルT2のテーブル座標(a,b)に格納された変換参照座標P(a,b)と逆変換テーブルT1の算出対象のテーブル座標(i,j)との距離L(a,b)を、変換参照座標毎に算出し、視点変換テーブルT2のテーブル座標(a,b)と、このテーブル座標(a,b)に格納された変換参照座標に係る距離L(a,b)と、に基づいて、逆変換テーブルT1の算出対象のテーブル座標(i,j)に格納される逆変換参照座標A(i,j)を算出する。
(もっと読む)
自動処理装置
【課題】装置本体の消費電力を十分に抑制でき、且つ装置の寿命延命化を図ることができる自動処理装置を提供する。
【解決手段】ATM1は、利用者検知ユニット10が利用者を検知すると、表示・操作ユニット3に対する一次電源の供給を開始する。ATM1は、利用者による取引種別の選択入力が行われると、選択された取引種別の取引処理に関与するユニットを判断し、ここで判断したユニットに対する電源供給を開始する。一方、ATM1は、利用者検知ユニット10で検知された利用者が取引を行わなかったとき(利用者の誤検知であった場合)、一次電源の供給を開始したユニット毎に動作の停止を指示し、そのユニットのシャットダウン処理の完了後に一次電源の供給を停止する。
(もっと読む)
歩行者検出装置
【課題】カメラによって取得した画像から歩行者を正確に検出しつつ、かつ当該歩行者を検出するための演算量を低減する高精度および高効率な歩行者検出装置を提供する。
【解決手段】本発明は、車両に搭載される歩行者検出装置であって、車両周辺の画像を取得する画像取得手段と、画像取得手段によって取得された画像から歩行者を探索する探索密度について、当該画像領域内で探索密度を一定とする探索密度一定モードと、当該画像領域内のうち、探索密度が高い第1領域と探索密度が低い第2領域とを設定する探索密度重点モードとのいずれかの探索密度モードを、道路状況に応じて設定する探索密度モード設定手段と、探索密度モード設定手段によって設定された探索密度モードに基づいて、画像取得手段によって取得された画像から歩行者を探索する歩行者探索手段と、歩行者探索手段によって探索された結果を通知する結果通知手段とを備える。
(もっと読む)
検知システムおよびその信号処理方法、プログラム
【課題】被写体が複数存在する場合であっても被写体別に検知することが可能な検知システムおよびその信号処理方法、プログラムを提供する。
【解決手段】複数の被写体の画像における検知範囲を含む位置に関する情報を記憶可能な位置記憶部144と、判定部16にて得られた検知情報から、全画像における被写体の位置と大きさを検索して検知範囲を含む被写体の位置を決定し、被写体に関する検知範囲を含む検知情報を位置記憶部に記憶可能な被写体位置決定部17と、を有し、解析処理部14は、撮像装置から所定走査面周期ごとに信号を取得し、複数の異なる走査面間で信号の信号レベル差から信号レベル差の時間平均を求め、さらに時間平均の値をもとに所定の演算を行う解析処理を行い、位置記憶部に検知情報が記憶されている場合には検知情報において指定される検知位置範囲の画像に対して選択的に上記解析処理を行う。
(もっと読む)
車両周辺監視装置
【課題】オプティカルフローによる画像処理を用いることなく、撮影画像から移動物体を検出し、その移動物体の存在を運転者が容易に気づくことができる車両周辺監視装置を提供する。
【解決手段】自車両に搭載され、自車両外部の周辺を撮影する撮影装置と、撮影装置にて撮影された撮影画像における検出ラインを設定し、検出ラインに沿って移動する移動物体の移動に伴って生じる検出ライン上の画素の明るさの変化を検出する検出手段と、検出手段により検出された結果に応じて、情報表示を生成する生成手段とを有する制御装置と、撮影画像及び情報表示を表示する表示装置とを備える車両周辺監視装置。
(もっと読む)
運転支援装置、及びその方法
【課題】特定の領域が存在する場合でも、必要に応じて逸脱する可能性を運転者に警告できる運転支援装置、及びその方法を提供する。
【解決手段】自車両の運転を支援する運転支援装置であって、予め定められた特定領域を検出する領域検出手段と、自車両が走行車線から逸脱して特定領域へ進入したか否かを判断する進入判断手段と、特定領域の周辺に存在する障害物を検出する障害物検出手段と、進入判断手段による特定領域へ進入したか否かの判断結果と、障害物検出手段による障害物の検出結果とに応じて自車両の運転を支援する運転支援手段とを備える。
(もっと読む)
画像処理装置、方法、およびプログラム
【課題】 本発明は、検知処理を行うためのパラメータを設定するために必要となる人員や作業を軽減した画像処理装置を提供することを目的とする。
【解決手段】 映像を取得する取得部と、前記取得部が取得した映像に画像を重畳する重畳部と、前記取得部が取得した映像上に設定された検知領域内の映像における物体の出現を検知する検知部とを有し、前記重畳部は前記検知手段によって出現を検知すべき物体の大きさに対応する画像を前記検知領域内の映像に重畳して前記検知手段に出力する。
(もっと読む)
煙検出装置
【課題】煙の特性を考慮して、2つ以上の検出手法を備えることで、煙検出の精度を高める。
【解決手段】カメラで撮影される画像を画像処理することにより撮影された範囲内での煙の発生を検出する際に、撮影された範囲内に、所定の検出領域を設定する検出領域設定手段を設け、該検出領域内における、煙検出判定要素の2つ以上を演算する演算手段を設けて、該検出領域内の煙の発生を検出し、煙検出判定要素は、透過率、収束輝度値、周波数スペクトル、平均輝度の平均値、平均輝度の分散からなり、演算手段は、検出領域の透過率を演算する透過率演算手段;検出領域の収束輝度値を演算する収束輝度値演算手段;検出領域の輝度の平均及び分散を演算する輝度平均分散演算手段;検出領域の平均輝度の時系列データを周波数分析して周波数スペクトルを求める平均輝度周波数分析手段;のいずれか2つ以上を備える。
(もっと読む)
画像処理装置、周辺監視システム、および、プログラム
【課題】高精度と高速性とを両立させた対応点探索を行う3次元画像処理技術を提供する。
【解決手段】撮像部2は、入射光量に応じて線形変換特性と対数変換特性との間で光電変換特性が切り換わるマルチモード撮影制御部201を備える。画像処理装置は、この撮像部2で撮像されたステレオ画像信号を入力し、当該ステレオ画像信号に含まれる複数の画像間の空間的対応関係を決定して撮像対象体の3次元画像情報を得る。撮像された画像のうち、線形変換特性で光電変換された領域については、高精度の第1の対応点探索方法を適用し、対数変換特性で光電変換された領域については、高速の第2の対応点探索方法を適用して、3次元画像情報を得る。画像領域の種類ごとに異なる特性の対応点探索方法を使い分けることによって、高精度と高速性とを両立させる。
(もっと読む)
101 - 120 / 897
[ Back to top ]