
Fターム[5B057DA15]の内容
Fターム[5B057DA15]に分類される特許
141 - 160 / 897
汚泥処理装置及び汚泥処理方法
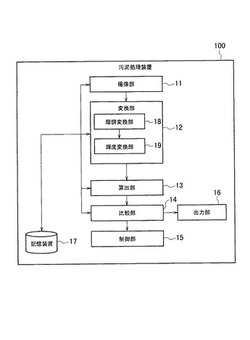
【課題】 汚泥原液中のフロックの凝集状態を撮影して、凝集剤の添加量及び凝集剤撹拌機の回転数を調整する汚泥処理装置及び汚泥処理方法を提供する。
【解決手段】 汚泥原液供給管33を通過する凝集フロックを撮像する撮像部11と、撮像部11が撮像した凝集フロックの画像を2値化し、2値画像を生成する変換部18と、変換部18が生成した2値画像に表示された凝集フロックの面積である凝集フロック測定面積及び予め設定した初期の凝集剤添加率に基づいて凝集フロック基準面積を算出する算出部13と、凝集フロック測定面積と凝集フロック基準面積とを比較する比較部14と、比較部14による比較結果に応じて、凝集剤供給ポンプ29及び凝集剤撹拌機21の回転数を制御する制御部15と、比較部14による比較結果に応じて、警報を発する出力部16とを備える。
(もっと読む)
画像処理装置、及び画像処理方法

【課題】ユーザの意図しない位置にスタンプ画像が合成されることを防止できるようにする。
【解決手段】写真にスタンプ画像が合成されていない状態では、合成するスタンプ画像の重なり禁止領域の情報を写真に反映させる。そして、写真に反映された重なり禁止領域の情報に基づいて、次に合成するスタンプ画像が、写真の重なり禁止領域に重なっているか否かを判断する。そして、所定の割合を超えて写真の重なり禁止領域に重なっていると判断した場合には、スタンプ画像が重なっている旨の警告を行う。もしくは、合成するスタンプ画像を重なり禁止領域に重ならない位置に移動させるよう制御する。
(もっと読む)
画像形成装置、画像形成方法、およびプログラム
【課題】紙厚のある記録媒体であっても表面と裏面に印刷する両面印刷時における表面と裏面の印刷位置ずれを精度良く検出して、高精度に補正できるようにする。
【解決手段】記録媒体の表面と裏面に補正パターンを印刷する両面印刷手段としてのプロッタ装置24と、記録媒体の両面に印刷された補正パターンを一度に読み取る両面読取り手段としての読取り装置10と、記録媒体の両面から読み取ったそれぞれの補正パターンの位置を検出する補正パターン位置検出手段としてのCPU18と、補正パターン位置検出手段によって検出された両面の補正パターンから印刷位置ずれの補正量を算出する演算手段としてのCPU18と、演算手段によって算出された補正量に基づいて、両面印刷時における表面と裏面の印刷位置ずれを補正する補正手段としてのCPU18とを備えている。
(もっと読む)
情報処理装置、プログラム及び情報処理システム
【課題】発生した異常の状態に応じて検出した情報を扱う。
【解決手段】情報処理システム1は、測定対象に付けられた検出対象物2と、検出対象物2を順次撮像する撮像装置4と、情報処理装置10を含む。情報処理装置10は、撮像装置4により順次撮像された撮像画像に基づいて、検出対象物2の位置情報を順次検出し、順次検出された位置情報の中から異常を示す位置情報を抽出し、抽出された位置情報が、1又は複数の異常の分類毎に定められた条件のいずれを満足するかに応じて、当該位置情報が示す異常の分類を判別し、判別した分類に定められた処理内容に従って上記抽出された位置情報を処理する。
(もっと読む)
医療画像表示制御装置及びプログラム
【課題】医師による医療画像診断において、異常部位を効率的に発見できるように支援することができる。
【解決手段】画像圧縮処理部22によって、複数種類の断層画像に対して、圧縮処理を行った圧縮断層画像を生成する。特徴抽出部26によって、圧縮断層画像を分割した分割領域の特徴を抽出する。異常判定部28によって、各断層の各分割領域について、異常箇所であるか否かを判定し、パターン生成部30によって、異常箇所のパターンを各断層について生成する。アニメーション生成部36によって、生成されたパターンを圧縮断層画像上に重畳させた画像を、各断層についてタッチパネル14に連続して表示させ、入力受付部37によって、ユーザからの入力を受け付ける。3Dダイヤグラム生成部38によって、入力を受け付けたときの断層に対応する圧縮断層画像と、異常判定部28による判定結果とを表わす3Dダイヤグラムを、タッチパネル14に表示させる。
(もっと読む)
物体認識装置
【課題】撮影画像のコントラストを、当該撮影画像に含まれる道路上の物体を認識するのに最適な状態に調整することができる技術を提供する。
【解決手段】他車両や落下物などの物体が存在する蓋然性の高い道路14部分と、車線(道路14)に沿って道路14上に描かれている白線13とに着目し、特に、白線13部分と道路14部分とのコントラストが強調されるように上方視の画像tFのコントラストを調整することにより、道路14上に物体が含まれているときには、道路14部分と物体との境界が極めて明りょうとなり、上方視の画像tFのコントラストを、上方視の画像tFに含まれる道路14上の物体の認識に最適な状態に調整することができる。したがって、コントラストが画像処理による物体認識に最適な状態に調整された上方視の画像tFを処理することで確実に道路14上の物体を認識することができる。
(もっと読む)
画像認識装置
【課題】撮像された画像にテアリングパッドが写り込んでいたとしても、簡易な構成で精度良く当該画像からドライバーの状態を認識することができる画像認識装置を提供する。
【解決手段】画像認識装置は、上記運転席前方から当該運転席方向を撮像する撮像手段と、当該撮像手段が撮像した画像の予め定められた認識範囲において上記ドライバーの顔の状態を検出し、当該顔の状態を示す顔情報を生成する顔情報生成手段と、上記認識範囲において上記車両のステアリングパッドを検索する検索手段と、当該検索手段によって上記認識範囲から上記車両のステアリングパッドが検出された場合、当該認識範囲を変更する変更手段とを備える。
(もっと読む)
車両周囲監視装置
【課題】本発明は、車外の人に対する警告を、人の顔向きで判断し、自車両の方を向いているか否かの判断を行い、自車両の方を向いていない場合のみ、注意喚起を行うことができる車両周囲監視装置を提供する。
【解決手段】人感知手段4は、撮像手段1で撮像した画像と人感知パターン記憶手段8の人感知パターンを比較して、車両周囲に人が存在するかどうかを確認する。人感知手段4が人を感知した場合、顔検知手段5が人の顔向きを判断し、車両周囲の人の両目を検知しない場合のみ、警告出力手段6により車両周囲の人へ注意喚起を行う。
(もっと読む)
車両の周辺監視装置
【課題】車両の周辺の対象物を確実に抽出して、速やかに運転者に知らせることが可能な車両の周辺監視装置を提供する。
【解決手段】周辺監視装置は、車両に搭載され、該車両の周辺の物体の位置を特定する物体位置特定手段と、車両に搭載され、該車両の周辺の画像を取得する撮像手段と、撮像手段により取得された画像を多値化する多値化手段と、物体位置検出手段が特定した物体の位置に対応する前記取得された画像に、該物体の位置の各々に対応する所定サイズのマスクを設定するマスク設定手段と、マスク設定手段により設定されたマスク毎に、対応する画像を多値化する際のしきい値を設定する多値化しきい値設定手段と、多値化手段により、対応する多値化しきい値を用いて多値化された画像に基づき所定の対象物の有無を判定する判定手段と、を備える。
(もっと読む)
車載画像処理装置
【課題】人や車両など種類が多く且つそれらを組み合わせたシーンに対応する処理を複数の処理ユニットに適切に行わせることができる車載画像処理装置を提供すること。
【解決手段】車載画像処理装置は、複数の処理ユニット40によって画像処理された処理結果に基づいて、各処理ユニット40の次回に実行する画像処理の種類と優先度を示すタグ情報を生成し、前回の画像処理時に生成されたタグ情報を用いて各処理ユニット40で画像処理を行わせるか否かを判定する。
(もっと読む)
画像検査装置
【課題】対象物に印字される文字の品質率が低下することにより生じる無駄はねを低減しながらも、検査の質が低下することを回避できる画像検査装置を提供する。
【解決手段】画像検査装置1は、新たな辞書を辞書記憶部11に追加で登録する追加登録部16を備えている。追加登録部16は、判定部14で良品印字と判定された場合において、品質率が判定閾値よりも高く設定されている規定値を下回ったときに、撮像画像から抽出した文字部分の画像をこの文字に対応付けて辞書を作成する。追加登録部16は、作成した辞書を辞書記憶部11に追加で登録する。画像検査装置1は、追加された辞書を照合部13で用いるようにすれば、たとえ文字の品質率が徐々に低下しても、品質率が判定閾値以下となって判定部14が不良印字と判断することを回避できる。
(もっと読む)
行動検出装置
【課題】対象とする人物の特定部位の検出やトラッキングを行うことなく顔全体の動きを検出することで、精度良く人物の行動を検出する。
【解決手段】カメラ2で撮像したドライバの顔周辺の画像がコントローラ3の画像入力部10に入力され、動き検出部12で入力画像の顔周辺に設定した領域全体の動きを算出する。そして、確認行動判定部14で画像動き情報と車両情報とに基づいてドライバの確認行動を判定し、判定結果に応じて出力部15から警報出力を行う。これにより、特定部位の検出を行う場合の検出精度の低下を回避し、また、特定部位を撮像するために制限されやすいカメラ設置位置を比較的自由に設定することが可能となる。
(もっと読む)
立体物識別装置、並びに、これを備えた移動体制御装置及び情報提供装置
【課題】同一の平面物体中に輝度が大きく異なる部分が存在しても、その平面物体と立体物との間を、撮像手段を用いて高い精度で識別することである。
【解決手段】立体物識別装置であって、P偏光画像とS偏光画像を撮像する偏光カメラ10と、この偏光カメラ10が撮像したP偏光画像及びS偏光画像の輝度合計値からモノクロ輝度を算出するモノクロ画像処理部13と、P偏光画像とS偏光画像との輝度差分値のモノクロ輝度に対する比率(差分偏光度)、及び、基準処理領域(日向路面に対応する領域)の差分偏光度と識別対象処理領域の差分偏光度と差分値である差分偏光度差分値を算出する差分偏光度画像処理部15と、モノクロ輝度と差分偏光度差分値とを識別指標値として用いて撮像領域内の物体が立体物であるか否かの立体物識別処理を行う立体物識別部18とを有する。
(もっと読む)
覚醒支援装置
【課題】覚醒支援装置において覚醒支援開始の要否判定の妥当性を向上させること。
【解決手段】第1候補の眠気度合いが閾値未満であると判定すると(S220YES)、算出された信頼度の値が予め定められた基準値以上かを判定する(S225)。信頼度の値が基準値以上であると判定すると(S225YES)、覚醒支援を開始することなく、作動処理を終える。一方、第1候補の信頼度の値が基準値未満であると判定すると(S225NO)、第2候補が覚醒寄りかを判定する(S230)。第2候補が覚醒寄りであると判定すると(S230YES)、覚醒支援を開始することなく、作動処理を終える。一方、第2候補が居眠り寄りであると判定すると(S230NO)、要否確認処理(A)を実行する(S235)。要否確認処理において、ユーザが覚醒支援開始を希望すれば、覚醒支援を開始する。
(もっと読む)
関心のある対象に対する植生成長を見積もる方法とシステム
関心のある対象に対する植生成長を見積もる方法が開示される。目標植生は第2検出データセットから識別される(30)。対応する目標植生は第1検出データセット内で識別され(34)、該第1検出データセットは該第2検出データセット(28)の前の時間に収集される(26)。第1統計値は、該関心のある対象に対する該第1検出データセット内の対応する目標植生の1つ以上の点の距離に基づき、該対応する目標植生の属性と考えられる(38)。第2統計値は、該関心のある対象に対する該第2検出データセット内の該目標植生の1つ以上の点の距離に基づき、該目標植生の属性と考えられる(40)。侵入速度は該第1統計値と該第2統計値の比較から決定される(42)。 (もっと読む)
障害物検出装置
【課題】様々な姿勢が予想される一般に困難である人等の検出対象物体の検出が、その動静や姿勢にかかわりなく高精度に検出することが可能な障害物検出装置を提供する。
【解決手段】時間的に連続する画像を取り込む画像取得部101と、画像について主に動体を検出するモーションベース検出部120と、画像について主に静物を検出する非モーションベース検出部120と、を有し、非モーションベース検出部は、画像の任意の所定領域(車両幅分の前、または後ろ)のみを対象とし、モーションベース検出部は、画像の所定領域より広い範囲を検出対象とする。
(もっと読む)
画像比較および文書認証のための画像位置合わせの方法
【課題】画像比較による文書認証において、有用な画像位置合わせ方法を提供する。
【解決手段】オリジナル文書画像のページの隅近くに、位置合わせマーカとして機能するバーコードスタンプが付加される。バーコードスタンプを含むオリジナル文書画像は印刷、回覧され、その間にオリジナル文書画像はデータベースに記憶される。印刷された文書を認証するには、印刷された文書をスキャンしてターゲット文書画像にし、そのターゲット文書画像が記憶されたオリジナル文書画像と比較される。バーコードスタンプは大域的画像位置合わせを行うための位置合わせマーカとして用いられる。次いで、ターゲット画像およびオリジナル画像は複数のサブ画像に分割され、画像比較を行う前に各サブ画像に対して局所的画像位置合わせが行われる。サブ画像の対から差分サブ画像が生成され、印刷された文書における改ざんを検出するために大域的差分画像にマージされる。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】画面全体からゆらぎ領域を確実に検出でき、監視対象とする物体を精度良く検知することが可能な画像処理装置、画像処理方法及びプログラムを提供する。
【解決手段】一の画像の画像データと、一の画像より過去に撮影された過去画像の画像データの差分を算出する差分処理部と、差分の時間変化を算出し、時間変化の周期性に基づいて、自然界のゆらぎを撮影した部分に相当する画面内のゆらぎ領域と、ゆらぎ領域ではない非ゆらぎ領域を抽出するゆらぎ検出部と、ゆらぎ領域と非ゆらぎ領域に応じて検知精度を変化させて画面内を移動する物体を検知する物体検知部とを備える。
(もっと読む)
乗員姿勢推定装置
【課題】自己遮蔽が発生した場合の姿勢推定精度を簡易な構成で向上させる
【解決手段】運転席及びその周辺を繰り返し撮影し、撮影された画像データを取得する(S10)。そして、取得された画像データに含まれる運転者の人体特徴点を検出し(S50)、人体特徴点の位置の変化に基づいて、人体特徴点の位置(人体特徴点予測位置)を予測する(S60,S70)。さらに、人体特徴点予測位置に基づいて、運転者の行動を予測する(S80)。また、予測した運転者行動に基づいて自己遮蔽が発生するか否かを判断する(S100,S120)。そして、自己遮蔽が発生すると判断された場合には(S20:YES)、自己遮蔽用人体特徴点検出アルゴリズムに設定する(S40)。一方、自己遮蔽が発生しないと判断された場合に(S20:NO)、自己遮蔽の発生を考慮しない通常用人体特徴点検出アルゴリズムに設定する(S30)。
(もっと読む)
車両制御装置
【課題】十分な安全性を確保しつつも、状況に応じて運転者の運転感覚に沿った制御を行うことのできる車両制御装置を提供する。
【解決手段】逸脱角度θに対する目標逸脱角度θ´を演算する目標逸脱角度演算部16が、白線WLと障害物B1との間の逸脱余裕距離Dに基づいて目標逸脱角度θ´を演算する。白線WLと障害物B1との間の逸脱余裕距離Dは、白線WLを越えた場合に自車両M1と障害物B1との間にどの程度の余裕があるのかを示している。当該逸脱余裕距離Dに基づいて、安全性を確実に確保できる範囲で目標逸脱角度θ´を演算しておけば、何らかの理由で逸脱角度θが増加する動作をするとしても、目標逸脱角度θ´を満たす範囲において、ある程度許容することができる。これによって、制御量が過剰に介入してしまうことを抑制することができる。
(もっと読む)
141 - 160 / 897
[ Back to top ]