
Fターム[5B057DA16]の内容
Fターム[5B057DA16]に分類される特許
3,981 - 4,000 / 4,067
表示制御装置および画像合成方法
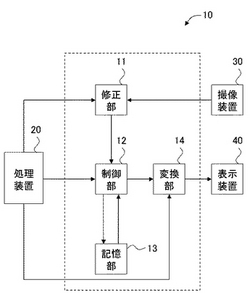
【課題】 複数のビデオメモリを用いることなく、任意の形状の画像を、容易に合成する。
【解決手段】 本発明の表示制御装置は、所定の画像を表す所定の階調データを記憶する記憶部と、複数の階調データを所定の階調データと比較し、複数の階調データ内に所定の階調データと同じ階調データがある場合、複数の階調データ内の所定の階調データと同じ階調データを、所定の階調データとは異なるように修正する、修正部と、記憶部から読み出した階調データが所定の階調データと同じである場合、記憶部はすでに記憶している階調データを保持し、記憶部から読み出した階調データが所定の階調データと同じでない場合、記憶部は修正部から出力された階調データを記憶するように記憶部を制御する制御部とを備える。
(もっと読む)
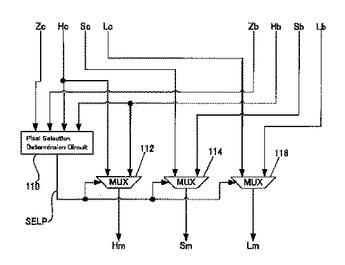
画像合成装置及びピクセルミキサ
異なる解像度の画像データを合成でき、かつ、合成の順番が予め定められている場合であっても、合成の順番に関係なく、複数の画像データを所望の表示優先順位にて合成できる画像合成装置及びピクセルミキサを提供する。選択ピクセル決定回路110は、2つのピクセルデータに含まれるデプスZc及びZbのうち、ピクセルが前面側に位置することを示すデプスを含むピクセルデータを選択する。ただし、ピクセルが透明であることを示す色相を持つピクセルデータは選択されず他のピクセルデータが選択される。マルチプレクサ112〜116は選択ピクセル決定回路110が選択したピクセルデータ(色相Hm/色飽和度Sm/明度Lm)を出力する。マルチプレクサ112〜116には、異なる出力レートでピクセルデータが入力されるので解像度の異なる画像を合成できる。
 (もっと読む)
(もっと読む)
ナビゲーションシステム

【課題】 交差点の近傍において自車のナビゲーション装置の表示部に表示される無駄な情報を削減して運転者の混乱を抑えることができ、ひいては安全で円滑な運転を行わしめることができる「ナビゲーションシステム」を提供すること。
【解決手段】 ナビゲーション装置8は、対向車線上の対向車両7を検出可能とされた検出手段5が、対向車線上に対向車両7を検出した場合に、監視カメラ3が撮影した画像を表示部15に表示する。
(もっと読む)
画像処理方法および装置並びにプログラム
【課題】MIP処理等の3次元医用画像から投影画像を生成する画像処理において、特定のハードウェアを必要とせず、また、投影画像の画質を実用に耐えうるレベルで維持しつつ、処理の高速化を可能にする。
【解決手段】MIP処理の場合、投影画像を構成する投影画素と視点と3次元医用画像とを通る視線上に複数の探索点を設定する際に、処理対象の探索点において、その視線で処理済の探索点中での最大画素値が更新されたかどうかを評価し、更新された場合には、その探索点とその次の探索点との間のステップ幅を、更新されなかった場合のステップ幅よりも小さくする。これにより、視線に沿った画素値変化の一例を表す図では、最大画素値が更新される可能性が高い実線部分では詳細な探索が行われ(画質レベルの維持)、更新される可能性が低い一点鎖線部分では粗い探索が行われる(処理の高速化)。
(もっと読む)
頬顎異常矯正学的手術のための治療計画を導出する方法及びそのための装置
【課題】 頭蓋計測及び/または人体計測分析を実施するための方法を提供する。
【解決手段】 頭蓋計測及び/または人体計測分析を実施するための方法は次の段階を含む:(1)3D医学画像モダリティを用いて人の頭の3Dスキャンを獲得する、(2)その3Dスキャンからのデータを用いて3D表面模型を生成する、(3)この3Dスキャンからこの3D表面模型に幾何学的にリンクした少なくとも一つの2D頭部X線像を形成する、(4)この少なくとも一つの2D頭部X線像及び/またはこの3D表面模型上に解剖学的標識点を示す、(5)この解剖学的標識点を用いてこの頭蓋計測及び/または人体計測分析を実施する。
(もっと読む)
解像度変換回路及び表示装置
【課題】 解像度変換処理において入力画素毎に異なる使用回数(解像度変換処理に使用される回数または対応する出力画素数)に対応するための記憶手段とその制御手段とを簡略化することを目的とする。
【解決手段】 入力された入力画像を解像度変換して出力画像を出力する解像度変換回路であって、入力画像を記憶する第1の記憶手段と、入力画像及び出力画像の画素数を使用して、出力画像の出力画素毎に、解像度変換処理による出力画素を生成するために必要な入力画像の入力画素を対応付ける入力画素対応付け手段と、を有し、対応付けした入力画素を使用して解像度変換処理を行う。
(もっと読む)
縁の一部を定義することにより画像内に縁を組み込む装置および方法
【課題】画像内に縁を組み込むための装置および方法。
【解決手段】画像領域内に縁領域を取り込むためのハードウェアで実行される方法が提供される。この方法では縁領域の一部分がメモリに格納される。その後画像領域内のピクセルの相対的位置を判断する。次にピクセルの相対的位置に応じてメモリから画像ピクセルまたは縁領域の部分の各ピクセルがフェッチされる。画像領域内に縁領域を組み込むための装置およびディスプレー・コントローラも説明される。
(もっと読む)
情報処理装置および画像補正処理方法および画像補正プログラム
【課題】 画像修正アプリケーションにおいてノイズ除去を行う際に、画像補正の詳細なパラメータをユーザが設定できないため、最適なノイズ除去を行うことが難しかった。
【解決手段】 画像補正の詳細パラメータとして、二値画像に対して黒点の大きさと、対象となる黒点周りの範囲を指定可能にし、指定された大きさ以下の黒点であり、かつ、指定された距離範囲に黒画素がない場合に対象黒点をノイズと見なすことで、ディザのような画像をノイズと誤認識しないようにする。
(もっと読む)
画像合成出力装置、画像合成表示装置、携帯通信機器、画像合成出力方法、画像合成出力用プログラム及び画像合成出力用記録媒体
【課題】 複数の画像を合成してなる合成画像を得る段階での省電力化を達成する画像合成技術を提供する。
【解決手段】 入力画像記憶部144に記憶される入力画像41又は42が、第1所定期間内に更新される通常の期間では、マルチレイヤ画像合成部150は、これらの画像41及び42を合成してLCD表示パネル160へ出力する。入力画像41、42の何れもが、第1所定期間内に更新されなければ、マルチレイヤ画像合成部150は合成した画像を出力するだけでなく合成画像記憶部146へ書き込む。第1及び第2入力画像41、42の更新がないまま、第1所定期間後に第2所定期間が経過すると、マルチレイヤ画像合成部150は、入力画像41、42の合成を行うことなく、合成画像記憶部146に記憶されている合成画像を読み出して、LCD表示パネル160へ出力する。
(もっと読む)
イメージリソースをローディングする方法及びイメージリソースローディングシステム
本発明は、特定のセルに対するレンダリング処理イベントが発生する場合、所定の基本記録空間から前記セルと連関したソースデータを識別する段階と、前記識別されたソースデータを構成する単位ソースデータを、所定周期間隔で、第1ローディングキューに順次移動させる段階と、前記第1ローディングキューに位置した前記単位ソースデータに対して、所定の判断基準によってローディングの適合度を判断する段階と、判断の結果、前記ローディングの適合度がノンパスの場合、前記単位ソースデータを第2ローディングキューに移動させる段階と、判断の結果、前記ローディングの適合度がパスの場合、前記プロセッサ手段は、前記第1ローディングキューに位置した前記単位ソースデータを所定のグラフィックメモリにローディングさせる段階と、所定のビデオプロセッサ手段において、前記グラフィックメモリにローディングされた前記単位ソースデータをレンダリングする段階と、を含み、前記ローディングの適合度を判断する前記段階は、前記プロセッサ手段のローディング処理の能力、または前記ビデオプロセッサ手段のレンダリング処理の能力を考慮して、前記ローディングの適合度を判断することを特徴とするイメージリソースをローディング方法及びイメージリソースをローディングシステムを開示する。 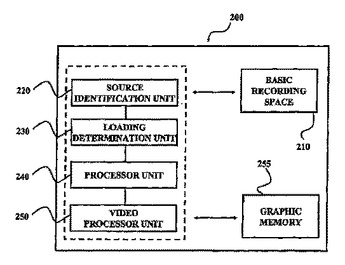 (もっと読む)
(もっと読む)
タイミングチャート編集システム
【課題】 グリッドコントロールを利用することで開発工数を大幅に削減したタイミングチャート編集システムを提供することを目的とする。
【解決手段】 各ビットマップデータを重ね合わせることにより、各セルに合わせたビットマップデータを生成する。ビットマップデータは、背景用ビットマップデータ100、関係線があるビットマップデータ101、状態線のあるビットマップデータ102、各種マーク類のビットマップデータ103、遅延時間を示すビットマップデータ105がある。各ビットマップデータ100〜105を重ね合わせることにより、セル200を作成する。また、セル201〜207も各セルを作成するのに必要なビットマップデータを重ね合わせる。ビットマップデータを重ね合わせて作成したセル200〜207を合成させ、タイミングチャートを作成する。
(もっと読む)
テストパターンの表示方法、医用画像表示装置及びプログラム
【課題】オペレータの視認精度を向上させ、オペレータの目視によるキャリブレーションをより正確に行う。
【解決手段】N個のテストパターンを表示部13に表示させる際、制御部11は一画面に一パターンづつ切り替え表示させる。また、N等分された駆動レベルが設定された表示領域の面積と他方の表示領域の面積との比率が7:3となるように、つまり低輝度レベルで表示される表示領域の方がその面積が大きくなるように、表示画面のサイズに応じてテストパターンを形成する各表示領域のサイズを変更し、サイズ変更されたテストパターンを表示部13の表示画面全体に表示させる。
(もっと読む)
識別方法、コンピュータプログラム及びコンピュータプログラム装置
CTスキャン画像中の病巣と壁との間の接合の検出方法において、内部空間(L)に対して前記壁の境界(B)を決定し、前記境界に沿った特異点(c1 ,c2 )を識別し、及び前記壁と前記病巣との間の接合点として、病巣のどちらかの側の1つの特異点を選択することを特徴とする方法が提供される。特異点は、境界の極大曲率の点及び直線と湾曲部との遷移点であってよい。特異点は、病巣の両側の第1および第2シード点(p1 ,p2 )を受付け、それらが既に境界上にあるわけではない場合にシード点を境界に対して移動し、シード点に最も近い特異点を探索することによって選択されてよい。シード点は、決定された接合点(j1 ,j2 )を隣り合うスライス画像から現在のスライス画像に移すことで決定してよい。 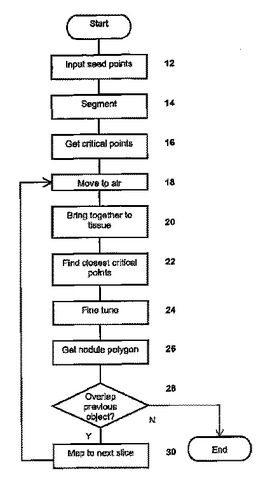 (もっと読む)
(もっと読む)
車両周辺監視装置
【課題】 本発明は、物標以外の物体の影響やノイズの影響を受け難く、良好な物標の認識精度を実現する車両周辺監視装置の提供を目的とする。
【解決手段】 本発明は、車両の所定位置に搭載された撮像手段の撮影画像に対して画像処理を行い、認識対象の静止物体を認識する車両周辺監視装置であって、車両の移動に伴って変化する認識物体の画素位置の移動方向を算出し、該移動方向の算出結果に基づいて、該認識物体が前記認識対象の静止物体であるか否かを判断することを特徴とする。
(もっと読む)
空間的にずれたサブフレームを生成及び表示する方法およびシステム
表示デバイス(26)を使用して画像(12)を表示する方法が提供される。方法は、画像の第1の部分及び第2の部分を含む画像データ(28)を受け取ること、第1の部分及びシミュレーションカーネル(2502/2602)を使用して第1の複数のサブフレーム(2416)を生成すること、第1の複数のサブフレームを生成することから独立して、第2の部分及びシミュレーションカーネルを使用して第2の複数のサブフレーム(2418)を生成すること、並びに、第1の複数の更新サブフレームのうちの第1のサブフレームを第1の位置に表示すること、第1の複数の更新サブフレームのうちの第2のサブフレームを、第1の位置から空間的にずれた第2の位置に表示すること、第2の複数の更新サブフレームのうちの第1のサブフレームを、第1の位置及び第2の位置から空間的にずれた第3の位置に表示すること、及び第2の複数の更新サブフレームのうちの第2のサブフレームを、第1の位置、第2の位置、及び第3の位置から空間的にずれた第4の位置に表示することを交互に行うことを含む。 (もっと読む)
画像処理方法及び手段
本発明は、一般に画像処理に関し、特に、飛行及び航空輸送と、陸上輸送と、船舶輸送と、潜水作業と、水中検査と、医療調査と、海洋考古学と、陸上考古学と、農業と、監視及びセキュリティと、食品安全と、エネルギーシステムと、林業のような広範囲の用途について、カラー画像中の物理的な物体表現の人による検出を容易化する方法及び手段に関する。本発明は、カラー画素マトリクス毎に別々に実行されるヒストグラム等化処理ステップ(250)を実行することにより、少なくとも2個の別個のカラー画素マトリクスMiによって形成されたカラー画像表現Icのための画像処理方法を提供することによってこれを実現する。種々の前処理がヒストグラム等化処理ステップ(250)より前に適用される。本発明は、本発明による方法を使用して種々の用途に適した多数のデバイスをさらに提供する。 (もっと読む)
画像情報を表示する方法およびシステム
画像と共に画像情報を表示する方法とシステムが提供される。画像表示システムは、画像と画像説明を含んでいる画像パッケージを受信する(421)。画像説明は、画像情報(または「クレジット」)と、画像情報をどのように表示させるかに関する命令とを含んでいる。そのあと、画像表示システムは、画像情報が、表示される画像(423)の一部とアルファブレンディング(426)されるように、受信した画像パッケージ(421)の画像と画像説明の画像情報を表示する(423)。 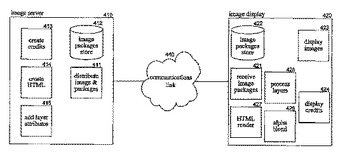 (もっと読む)
(もっと読む)
画像の選択的デコンボリューション
画像の特徴間のクロストークを低減するためにデコンボリューションを選択的に使用する方法およびシステムを提供する。デコンボリューションのために画像の領域を選択する方法は、a)複数の特徴を有する画像を提供するステップであって、各特徴が少なくとも1つの値(v)に関連する、ステップと、b)画像の既知の低値ゾーンに隣接する高値特徴であるテスト特徴を識別するステップであって、テスト特徴が、テスト特徴の値(vt)の画像の隣接する低値ゾーンの値(Vo)に対する比率であるテール率(rt)を有する、ステップと、c)テスト特徴のテール率(rt)の関数である閾値tを計算するステップと、d)画像の選択領域を識別するステップであって、選択領域が、隣接する特徴の間の値(v)の比率が上記閾値(T(rt))を上回る領域である、ステップと、を含む。通常、本発明の方法は、さらに、画像の選択領域に対してデコンボリューションを行うステップを含む。 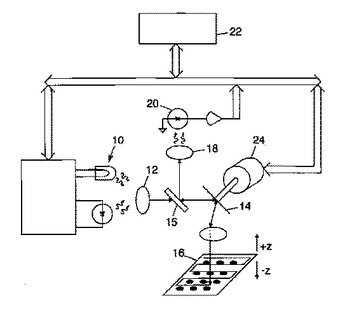 (もっと読む)
(もっと読む)
画像処理装置、イメージングシステム、並びに画像内のオブジェクトを拡大縮小するコンピュータプログラム及び方法
本発明は、画像内のオブジェクトを拡大縮小する画像処理装置に関し、この画像処理装置は、マーカの実寸法と、該マーカの、画像内におけるピクセル単位での寸法との関係から導出する校正係数に基づいて前記オブジェクトを拡大縮小するように構成した校正器を備えるもので、この校正器をさらに、前記画像内で識別される複数の異なる向きのマーカを用いて得られる複数の校正係数を生成するように構成する。画像1は、空間的に異なる向きを向い解剖学的構造2に対して配置が異なる、複数のオブジェクト3,8,9を含んでいる。オブジェクト3は、このオブジェクト3の長さをピクセル単位で測定すると共に、オブジェクト3の実長を、空間的にオブジェクト3と同様の配置をとるマーカAから求めた校正係数を用いて計算するように構成した測定ツールにリンクされる。画像1はさらに、オブジェクト8,9の実長を、これらオブジェクトのピクセル単位での長さ、および、マーカBを用いて求めた校正係数に基づいて計算するように構成した測定ツールにリンクされるオブジェクト8,9も含んでいる。異なるマーカに対応するオブジェクトは校正グループを形成するようにグループ化して、校正係数の更新によって、同じ校正グループ内の全てのオブジェクトの実寸法が自動的に更新されるようにするのが好適である。ユーザの利便性のために、各校正グループの識別は変えるのが好適である。本発明はさらに、イメージングシステム、画像内のオブジェクトの拡大縮小を可能にするコンピュータプログラムおよび方法にも関する。  (もっと読む)
(もっと読む)
イメージを見てエンハンスする方法及びシステム
本発明は、ディスプレイ(14)と、メモリと、ビットイメージのための処理手段と、ビットイメージを受け取る入力装置とを備えた移動装置(12)のディスプレイ(14)においてイメージを見てエンハンスする方法及びシステムに係る。ビットイメージを受け取り、予め選択されたスケーリングアルゴリズムを使用して2つの段階(31,20)でより小さなスケールへと処理し、第1のスケーリングは、中間サイズのビットイメージ(33)を発生し、第2のスケーリングは、表示されるべきサイズの第2ビットイメージ(21)を発生する。この表示されるべきビットイメージ(21)をエンハンスする。少なくとも2つのエンハンシングアルゴリズムを含むエンハンシングチェーン(29)を使用して第2ビットイメージ(21)をエンハンスする。 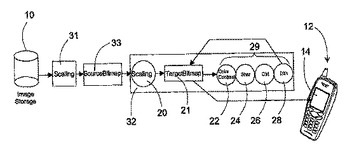 (もっと読む)
(もっと読む)
3,981 - 4,000 / 4,067
[ Back to top ]