
Fターム[5B057DA16]の内容
Fターム[5B057DA16]に分類される特許
1,921 - 1,940 / 4,067
映像信号処理方法、映像信号処理方法のプログラム、映像信号処理方法のプログラムを記録した記録媒体及び映像信号処理装置
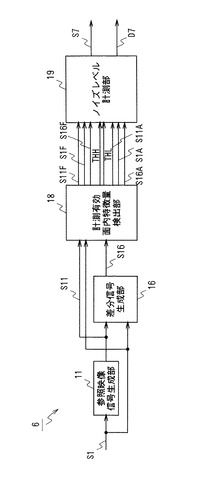
【課題】本発明は、映像信号処理方法、映像信号処理方法のプログラム、映像信号処理方法のプログラムを記録した記録媒体及び映像信号処理装置に関し、例えば映像信号中のノイズを除去するノイズフィルタに適用して、従来に比して一段と精度良くノイズレベルを計測する。
【解決手段】本発明は、ノイズレベルの計測に適していない特徴量を除外してヒストグラムを作成し、このヒストグラムの分析によりノイズレベルS7を計測する。
(もっと読む)
ノイズ除去装置並びにプログラムおよび方法

【課題】多重解像度変換と方向性を有するフィルタ処理を組み合わせたノイズ除去方法において、細かい構造に対応した方向判別とノイズの影響を受けない方向判別を両立するとともに、演算規模の縮小を図ることができるノイズ除去方法およびプログラム並びに装置を提供することを目的とする。
【解決手段】入力画像信号を多重解像度変換することによって、互いに異なる周波数帯域を有する複数の帯域画像信号を作成し、各帯域画像信号に対してそれぞれノイズ除去処理を施すノイズ除去装置であって、ノイズ除去の対象となる帯域画像信号の周波数帯域および該周波数帯域よりも低域側の周波数の情報を含む第1の画像信号と、該帯域画像信号の周波数帯域よりも低域側の周波数の情報を含む第2の画像信号とを用いて、該帯域画像信号のエッジ成分の方向を判別する方向判別手段と、前記エッジ成分の方向に応じて、該帯域画像信号のノイズを除去するノイズ除去手段と、を備える。
(もっと読む)
情報処理方法及び情報処理装置
【課題】 複数の撮像装置をそれぞれ処理装置に接続した状態で、第1の撮像装置の位置姿勢情報計測値を第2の撮像装置の位置姿勢に変換するための較正情報をより簡便に取得することを目的とする。
【解決手段】 マスタ演算処理装置300は、ビデオカメラ120が撮影したランドマークを含む撮影画像を入力し、ビデオカメラ120の位置姿勢を算出し、スレーブ演算処理装置1300に送信する。スレーブ演算処理装置1300は、ビデオカメラ1120で撮像された画像上のランドマークの識別番号及び画像座標を取得し、(画像座標−世界座標−マスタ撮像装置位置姿勢)の組としてデータリストを生成する。生成したデータリストより較正情報算出部1340は、画像座標の理論値と実際の観測値との誤差が最小となるようにビデオカメラ120からビデオカメラ1120への位置姿勢の較正情報を算出する。
(もっと読む)
画像処理方法及び画像処理プログラム
【課題】大腸のように屈曲の多い管状組織の壁の内部及び内壁面を同時に観察することができる画像処理方法及び画像処理プログラムを提供する。
【解決手段】この画像処理方法では、(a)のような管状組織10の断面がある時に、管状組織10の中心パス14を中心とする半径が基準距離rの範囲11を求め、基準距離rの外側部分12はレイキャスト法により仮想光線15を投射して3次元画像を描画し、基準距離rの円周13上は円周13上のボクセル値を用いて2次元円筒断面(MPRに相当する)を描画する。この画像処理方法によれば、管状組織10の内部13(断面画像)と表面12(投影画像)が同時に観察でき、更に管状組織10を広範囲に渡って一望することができる。
(もっと読む)
画像データの出力画像調整
【課題】恣意的に設定された出力条件を損なうことなく画像データの画質を自動調整する。
【解決手段】カラープリンタの制御回路30は、スロット34にメモリカードMCが差し込まれると、メモリカードMCから画像出力制御情報GIを取得して解析する。CPU31は、光源としてオート光源が設定されていない場合には、カラーバランスを除いた特性パラメータについて基準値、係数を参照した補正を行い、補正後の特性パラメータを反映して画像データの画質を調整する。
(もっと読む)
ノイズ除去装置並びにプログラムおよび方法
【課題】方向性フィルタ処理によりエッジ保存性能の高いノイズ除去を実現するとともに、平坦部において問題となる模様状のノイズを低演算量、低回路規模で除去するノイズ除去装置並びにプログラムおよび方法を提供することを目的とする。
【解決手段】入力された画像に対して、該画像に含まれるエッジ成分の方向に応じたフィルタ処理を施し、前記画像の平坦部とエッジ部とで異なる特性を有するコアリング処理を適用するノイズ除去装置であって、複数の方向に関する評価値を計算する評価値計算手段と、前記評価値からエッジ成分の方向を判別する方向判別処理手段と、前記評価値から平坦部かエッジ部かを判別する平坦度判別処理手段と前記方向判別処理手段の結果により前記フィルタ処理を施す方向性フィルタ処理手段と、前記平坦度判別処理手段の結果により前記コアリング処理を行うコアリング処理手段と、を備えた。
(もっと読む)
顔画像解析システム
【課題】毛穴・シミの両方を画像処理により同時に抽出可能な顔画像解析システムを提供する。
【解決手段】撮像カメラ4により撮影された顔画像データを画像処理することで毛穴・シミの検出を行なう顔画像解析システムであって、撮影された顔画像データに基づいて顔領域を設定する顔領域設定手段36aと、顔領域を構成する各画素について、注目画素を含む所定領域について作成されたヒストグラムに基づいて、最大頻度を有する画素値を取得し、この取得された画素値と注目画素の画素値との差分データを演算する差分演算手段36bと、演算された差分データを少なくとも1つの閾値によりn値化するn値化手段36cと、n値化された結果に基づき、毛穴・シミが含まれる第1領域と毛穴・シミが含まれない第2領域とに分類する領域分類手段36dと、この分類処理により得られた各クラスターを解析して毛穴・シミの判定を行なう判定手段36eと、を備えている。
(もっと読む)
撮像装置
【課題】蛍光検出を正確に行うことすることができる撮像装置を提供する。
【解決手段】撮像装置は、受光面を備え、基板面上に形成された複数のスポットからなる少なくとも1つのスポットエリアを受光面にて撮像する撮像素子39と、受光面上に付着した付着物を取り除くための清掃部42と、を有する。
(もっと読む)
位置姿勢計測装置及びその制御方法
【課題】複雑な形状を有する計測対象物体の位置姿勢推定のために必要な手続きを簡便化することを可能にする。
【解決手段】計測対象物体を撮像する撮像装置と前記計測対象物体との間の相対的な位置姿勢を計測する位置姿勢計測装置は、計測対象物体の3次元モデルデータに基づいて計測対象物体の構成面を抽出するとともに、構成面を形成する線分から、撮像画像のエッジの検出に用いるべき計測用線分を抽出する。位置姿勢計測装置は、抽出された計測用線分を撮像装置の推定された位置姿勢に基づいて撮像画像に投影し、抽出された構成面によって隠蔽されない計測用線分を選択し、選択された計測用線分と撮像画像の対応するエッジとに基づいて撮像装置と計測対象物体との相対的な位置姿勢を算出する。
(もっと読む)
画像信号補正方法
【課題】第1色盲を患う者は「濃い赤」(R=100%、G=0%、B=0%)は、ほとんど「黒」に見えて、「黒」と見分けられない。さらに暖色系の「濃い緑」は、「茶色」とほとんど見分けることが困難である。
【解決手段】入力される画像信号であるR(赤)信号、G(緑)信号、B(青)信号の値に応じて補正信号を生成する補正信号生成手段と、その補正信号により入力信号を補正して出力する補正手段とにより、補正した画像信号とすることを実行する画像信号補正手段の動作方法。
(もっと読む)
カメラ姿勢取得支援システム
【課題】車両の製造ライン上において、生産性を低下させることなく、車両におけるカメラの取り付け姿勢を取得させることが可能なカメラ取付支援システムを提供する。
【解決手段】ライン速度センサ106は、コンベア101の移動速度を車両200の移動速度として検出する。表示制御部108は、ライン速度センサ106によって検出された車両200の移動速度を入力し、当該車両200の移動速度に基づいて、パターン表示部102及び104に、車両200と同一速度及び同一方向で移動する市松模様のパターンを表示させる。
(もっと読む)
画像処理装置及びそのプログラム
【課題】 撮影画像の広範囲に亘って生じるノイズを除去するためのフィルタ処理に伴う計算量を大幅に抑えることができる画像処理装置及びそのプログラムを実現する。
【解決手段】 εフィルタに用いられる画像処理フィルタ(例えば、図3(c)に示すように注目画素と周辺画素を、加重可能な範囲全体に亘って加重させるフィルタ)を、加重させる範囲の1部の画素に対して加重させ且つ加重する範囲がそれぞれ異なるように4分割し、該4分割された分割フィルタ(図4の(a)参照)の中から、注目画素の画像データ上の位置に応じて、使用するフィルタを変えて(図4(b)参照)、εフィルタ処理を行うというものである。
(もっと読む)
顔画像検出装置、顔画像検出方法及び撮影装置
【課題】顔画像位置の検出時間及び顔画像位置検出に要する電力消費を増大させることなく、顔画像位置を精度良く検出することができる顔画像検出装置を提供する。
【解決手段】入力画像データを用いて顔画像の位置を検出する顔画像検出装置であって、前記入力画像データを縮小して、360×i/n(nは2以上の整数:i=0〜n−1)度回転させた360/n度おきのn枚の縮小回転画像データを作成する縮小回転画像データ作成部104と、前記n枚の縮小回転画像データを対象として顔画像の位置を検出する顔検出部106とを備える。
(もっと読む)
画像評価装置、および画像評価プログラム
【課題】画像処理に伴う画質の劣化状況を評価して表示すること。
【解決手段】画質評価部103aは、原画像を画像処理して得た処理後画像の画質を評価するために、原画像と処理後画像とを、画質の劣化現象を表す特徴量を用いて比較して、画像処理に起因する処理後画像における画質の劣化を、画質の劣化現象を表す特徴量ごとに評価する。評価結果出力部103bは、原画像、処理後画像、および評価結果を表示する。
(もっと読む)
撮像装置および表情評価装置
【課題】被撮影者あるいは撮影者にとってより満足度の高い画像を撮像できるようにする。
【解決手段】撮像によって得られた画像信号が記録媒体に記録されるまでの期間において、顔検出部31は、その画像信号から人物の顔を検出し、表情評価部41は、検出された顔の表情を評価して、例えば笑顔と通常の表情などの異なる表情の間において一方の表情にどれだけ近いかの度合いを示す表情評価値を算出する。報知制御部42は、算出された表情評価値の大きさを視覚的に示す報知情報を生成して、例えばディスプレイ16を通じて、撮影者あるいは被撮影者などに対して報知するように制御する。さらに、表情評価部41は、表情評価値が所定のしきい値を超えた場合には、記録動作制御部43に対して、画像信号を記録媒体に記録させるように要求する。
(もっと読む)
外観検査システム
【課題】判定方法や表示方法などが変更された場合であっても、大きくプログラムを作り直す必要がなく、また、複数のプロセッサーを有する検査装置で検査する場合であっても大きくプログラムを作り直す必要のないシステムを提供する。
【解決手段】プリント基板3の形成状態を検査する外観検査システム1において、まず、基準データ記憶手段17aに基準画像データを格納しておき、コア処理手段21は、この基準画像データの読み出しを行う。そして、プリント基板3の形成状態を判定する複数の判定手段22から基準画像データの読み出し要求があると、判定手段22a、22bは、独自の判定プログラムに基づいて対応基準データを生成し、その対応基準データと被検査画像を用いて形成状態の良否の判定を行う。そして、その判定結果を、コア処理手段21に送信し、判定結果記憶手段17bに格納する。
(もっと読む)
撮像装置、及び顔検出方法、顔検出制御プログラム
【課題】ユーザーに煩雑な設定作業を行わせることなく、被写体に応じた効率的な顔検出を可能とする。
【解決手段】
顔検出モードとして、顔領域の検出条件が異なるスピード優先モードと人数優先モードとを予め用意しておき、使用者に所望とする顔検出モードを選択させ、顔検出時に検出可能とする顔サイズの下限値(顔領域の横方向の画素サイズXmin及び縦方向の画素サイズYmin)と、顔領域の検出数の上限値(顔Max)を、使用者によって選択された顔検出モードに応じた値に設定する(SA5、SA6)。また、シャッターキーの半押しによる撮影予告が行われたとき、顔検出モードがスピード優先モードであった場合には、それを強制的に人数優先モードに変更する(ステップSA7〜SA9)。
(もっと読む)
画像処理装置、画像読取装置、画像処理プログラム及び記録媒体
【課題】本発明は、読取可能範囲を超える大きさの原稿の分割読取画像を自動結合する画像処理装置、画像読取装置、画像処理プログラム及び記録媒体に関する。
【解決手段】画像読取形成装置1は、原稿読取部20で、原稿面が最大スキャン可能範囲よりも大きい原稿を複数回に分割して読み取ると、該分割読取画像の連続性を画像データ加工部15で判断し、連続性が確認されると、画像データ加工部15で該分割読取画像をその連続性に応じた状態で結合する。したがって、1回で読み取ることのできない大きな原稿を分割して読み取っても、各分割読取画像の連続性を判断して自動結合することができる。
(もっと読む)
画像歪み補正装置
【課題】コストを抑えつつ画像歪みをリアルタイムで適切に補正する。
【解決手段】補間処理手段4は、座標変換手段3で変換された座標(x,y)の画素値について、輝度成分Yに対しては線形近似補間処理を行い、色差成分U,Vに対しては最近傍補間処理を行う。人間の目がその変化に敏感である輝度成分Yに対しては線形近似補間処理を行い、人間の目がその変化に鈍感である色差成分U,Vに対しては線形近似よりも簡単な処理(最近傍補間処理)で補間することにより、補間処理手段4の構成(補間処理用プログラムの構成)を簡素化し、その結果、輝度成分Yと色差成分U,Vの両方を線形近似補間処理する場合と比較して、プログラムの規模が小さく且つ処理時間が短くなるためにコストを抑つつ画像歪みをリアルタイムで適切に補正することができる。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】複数の観察対象が順次撮像された一連の観察画像における各観察画像に撮像された観察対象を迅速に判定できること。
【解決手段】複数の観察対象として食道、胃、小腸および大腸が順次撮像された一連の観察画像を処理する画像処理装置1において、一連の観察画像のうち少なくとも処理対象画像の圧縮画像データに基づく圧縮情報をもとに、その処理対象画像に撮像された臓器を食道もしくは胃と、小腸と、大腸とのいずれか一つと判定する臓器判定部4aを備え、臓器判定部4aは、一連の観察画像内で処理対象画像を順次切り換えるとともに、その処理対象画像に撮像された臓器を順次判定する。
(もっと読む)
1,921 - 1,940 / 4,067
[ Back to top ]