
Fターム[5B057DA16]の内容
Fターム[5B057DA16]に分類される特許
1,941 - 1,960 / 4,067
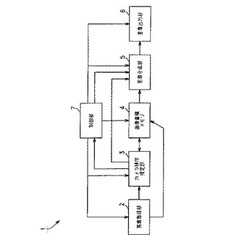
映像処理装置、映像処理方法、プログラム及び記録媒体、並びに映像処理システム
【課題】 例えば放送された映像の空間をより広げて認識することができる映像を合成することができる映像処理装置、映像処理方法、プログラム及び記録媒体、並びに映像処理システムを提供する。
【解決手段】 映像処理装置1は、テレビジョン画像信号が供給される画像取得部2と、画像取得部2により取得された入力画像の第1のフレーム画像と時間的に前のフレームである第2のフレーム画像とに基づいて当該第1のフレーム画像の動きを検出し、画枠からはみ出すはみ出し部分を推定するカメラ動き推定部3と、はみ出し部分を記憶する画像蓄積メモリ4と、第1のフレーム画像において画枠外となるはみ出し部分を第1のフレーム画像に合成して画像を創造する画像合成部5と、はみ出し部分が合成されて得られた合成画像を出力する画像出力部6と、これらを制御する制御部7とから構成されている。
(もっと読む)
駐車支援装置

【課題】駐車操作が完了したことを認識し、駐車が完了したときにその旨をドライバーに報知することができる「駐車支援装置」を提供すること。
【解決手段】車両及び車両周囲の画像を車両の直上からの視点で表す画像(俯瞰画像)で表示する駐車支援装置において、表示される画像データから駐車枠を検出し、自車両と駐車枠との角度を算出する(ステップS40)。そして、自車両の画像及び検出された駐車枠に基づいて自車両と駐車枠との相対位置を算出する(ステップS80)。自車両が前記駐車枠内に入り、かつ、自車両と前記駐車枠との角度が所定角度以内であるか判断し(ステップS70、S90)、かかる条件を満たしたときに駐車完了信号を出力する(ステップS100)。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】観察対象の種類に応じて異なる特徴を示す画像領域を確実に検出するときの検出精度を向上させることができること。
【解決手段】画像処理装置1は、一連の観察画像のうちの処理対象画像に撮像された観察対象の種類を判定する臓器判定部4aと、異常検出パラメータを用いて処理対象画像内から特異な領域である異常領域を検出する異常領域検出部4cと、臓器判定部4aの判定結果に対応するパラメータ値を異常検出パラメータとして設定し、異常領域検出部4cにこの異常検出パラメータを用いて異常領域を検出させる画像処理制御部6aと、を備える。
(もっと読む)
画像処理方法および装置並びにプログラム
【課題】画像を観察した際に人間が知覚するコントラスト感を定量化し、これにより画像データに対して適切な画像処理を施す。
【解決手段】コントラスト感定量化手段1において画像データS0のボケ画像データを作成しこれのヒストグラムを作成する。画像データS0のヒストグラムは、詳細な部分の明暗情報などを含むため、その分布幅画像データS0により表される画像を観察した際の大局的なコントラストを表すものではないが、ボケ画像データのヒストグラムは画像中の詳細な部分が除去されるため、その分布幅は画像の大局的なコントラストを表すものとなる。そしてボケ画像データのヒストグラムの分布幅をコントラスト感C0として求め、これを処理手段2に入力する。処理手段2においてはコントラスト感C0に基づいて画像データS0を階調変換する際の階調変換LUTを切り替えて画像データS0に対して階調変換処理を施して処理済み画像データS1を得る。
(もっと読む)
画像処理装置、および、画像処理方法
【課題】パラメータを調整するユーザの負担を軽減することができる技術を提供することを目的とする。
【解決手段】対象画像データの解析結果に応じて選択された制御パラメータを調整するためのユーザインタフェースを表示部に表示する。
(もっと読む)
超音波診断装置、超音波画像処理装置及び超音波画像処理プログラム
【課題】 動きのある診断対象の同一部位に関する三次元運動情報を正確且つ迅速に取得することができる超音波診断装置等を提供すること。
【解決手段】 臨床的に有用なASE分割に対応したBasal/Mid/Apicalの3断面を初期時相で指定し、残りの時相は三次元的にスペックルトラッキングすることで3断面の位置を少なくとも1心周期に関して追跡する。追跡された位置に関する3つのCモード投影像を再構成する。更に、追跡された位置での任意の壁運動パラメータを演算し、Cモードに重畳して表示ないしPolar-mapに投影表示する。Cモードの投影像法としては、初期時相で定めた断面に垂直な移動成分のみを検出して投影、各壁の平均的な移動成分を検出して投影、各心筋位置を追跡して投影のいずれかの手法を採用できる。得られたCモード画像は、長軸像及びCモード画像の位置を表すマーカと同時に表示される。
(もっと読む)
画像補正装置、画像補正方法、肌診断方法およびプログラム
【課題】人物画像をより美しく見せるための画像補正の技術を提供する。
【解決手段】第1撮像条件で撮像された第1画像において予め定められた条件を満たす肌の部分領域を特定する部分領域特定部と、第1撮像条件と異なる第2撮像条件で撮像された第2画像において部分領域に対応する対応領域を特定する対応領域特定部と、第2画像の対応領域に予め定められた画像処理を施すことによって第2画像を補正する画像補正部と、を備える画像補正装置を提供する。
(もっと読む)
図形縮小編纂方法及び装置
【課題】 地図の縮小に応じて、家屋の形状を見やすいものに自動変形する。
【解決手段】 除去判定装置12の外接長方形設定装置14は、入力家屋データ10に外接する長方形を設定し、比較器16が、長方形設定装置14により設定された長方形の短辺を基準長Laと比較し、短辺が基準長La以上の家屋データのみを後段に出力する。変形装置18は、除去判定装置12からの家屋データの最短辺が基準長Lb以上になるまで変形を繰り返すことで、形状を簡略化する。縮小装置20は、変形装置18により形状を簡略化された家屋データを、目的の縮尺に単純に縮小されたサイズより僅かに小さいサイズに縮小する。
(もっと読む)
表面を走査し三次元物体を作製するための方法及びシステム
【課題】物体のマッピングのより大きな正確度を得ることができる方法及び装置を提供する。
【解決手段】三次元物体の表面に画像が投影され(611)、画像は、表面を測定しマッピングするために使用される複数の個別の形状を含むパターンを含むことができる。画像は、複数の形状を個別に識別するためにコード化された情報を含む特徴部をさらに備える。投影軸及び視軸に沿った点によって形成された平面に垂直な線に沿ってコード化された情報が検索されるように(613)、コード化された情報を含む特徴部が配向される。特徴部の使用は、マルチフレーム独立走査を実行するために使用される(612)。
(もっと読む)
画像処理装置、画像変換方法及びプログラム
【課題】複雑な計算を必要とせずに、各画像を位置合わせするための変換式または特徴点対応のインライア集合を高速に求める。
【解決手段】少なくとも2つの画像を取得し(ステップS100)、第1の画像から一定の制約の下で直線上に並んだ特徴点を選択すると共に、この選択された特徴点を第2の画像上で追跡する(ステップS101〜S102)。この追跡により追跡された各特徴点から所定数の点を選び、これらの点を元に第2の画像上で直線上に並んだ特徴点を評価点として再帰的に生成する(ステップS103〜S106)。そして、各評価点と第2の画像上で追跡された各特徴点との適合性を評価し(ステップS107〜S110)、最も適合性の高かった点の集まりを用いて画像間の変換式を算出する(ステップS112)。
(もっと読む)
定量測定装置、定量評価装置及び画像処理プログラム
【課題】パーシャルボリューム効果がある場合においても、所望の組織を高い精度で再現性高く抽出し、かつ定量評価することができる。
【解決手段】第1の組織を定義する第1の画素値範囲と第1の組織に隣接する第2の組織を定義する第2の画素値範囲との間の画素値範囲に基づいて、第1の組織と第2の組織とが1画素に含まれている中間画素を医用画像から抽出する。1画素に含まれる第1の組織の割合を示す分配係数と、中間画素の画素値とに基づいて、医用画像中全中間画素に含まれる第1の組織を分離する。医用画像から第1の画素値範囲に基づいて分離された第1の組織の量と、中間画素から分離された第1の組織の量とを加算して、医用画像に含まれる全ての第1の組織の量を算出する。
(もっと読む)
電子部品装着方法及び電子部品装着装置
【課題】プリント基板の反り状態に則した測定位置を指定することができ、且つ測定位置の指定作業が簡単に行える電子部品装着方法及び電子部品装着装置を提供する。
【解決手段】計測サンプル用のプリント基板Pを位置決め部で位置決めした後、バックアップベースを上昇させてバックアップピンを基板Pの裏面に当接させて水平に支持する。次いで、高さレベル検出装置が基板Pの反り状態を測定した測定結果に基づき、CPUがモニタに3D表示か等高線表示させる。作業者が画面上での測定位置を指定すると、CPUは各指定した位置を基板P上の座標に変換し、装着データの冒頭に指定座標を追加して書き込みRAMに格納させる。そして、基板Pの生産運転時に指定座標が追加された装着データに従い、高さレベル検出装置が指定された測定位置の高さレベルを測定し、その測定値をRAMを格納して、電子部品の装着時に各測定値を使用する。
(もっと読む)
車両周辺監視装置
【課題】車両に備えた撮像手段により撮影された赤外線画像から、基準画像を用いた形状判定により人工構造物を除外し、残された対象物を歩行者や動物等の動く物体として検出する車両周辺監視装置を提供する。
【解決手段】車両に備える赤外線カメラ2R、2Lにより撮影した赤外線画像から、該車両の周辺に存在する物体を検出する車両周辺監視装置であって、画像処理ユニット1は、赤外線画像から赤外線を発する対象物画像を抽出する対象物抽出手段と、対象物抽出手段の抽出した対象物画像と直線パタン、あるいは直角パタンからなる基準画像との照合により、該対象物が人工構造物であるか否かを判定する人工構造物判定手段とを含む。
(もっと読む)
画像評価装置、ウェブページ評価装置、画像評価方法、ウェブページ評価方法及びプログラムならびにASPサービスサーバ
【課題】画像内における色覚異常者にとって見難い輪郭を抽出して表示する。
【解決手段】まず正常者における輪郭の見難さの評価値(A)を算出し(ステップS32)、次に第一色覚異常者における輪郭の見難さの評価値(B)を算出し(ステップS33)、(A)と(B)の差分を算出し、第一色覚異常者にのみ見難い輪郭(β)を算出する(ステップS34)。同様に、第二色覚異常者における輪郭の見難さの評価値(C)を算出し(ステップS35)、(A)と(C)の差分から第二色覚異常者にのみ見難い輪郭(γ)を算出する(ステップS36)。最後に(β)と(γ)の和をとり、原画像と共に表示する(ステップS38)。
(もっと読む)
画像生成装置及び方法、プログラム、並びに記録媒体
【課題】本来投影したい画像より低解像度の投影画像を投影する投影装置を利用して、本来投影したい画像と同等の画質の投影像を投影面に投影する。
【解決手段】画像処理装置11は、複数の位相画像Qが投影面13に投影される場合に、複数の位相画像Qのそれぞれの所定の画素が重なり合って形成される領域と、入力画像Wの所定の画素とを対応付け、対応する領域の画素値と入力画像Wの画素の画素値との差異が最小となる位相画像Qの画素の画素値を演算する。本発明は、例えば、画像処理装置に適用できる。
(もっと読む)
色変換装置及び色変換プログラム
【課題】簡易に出力色再現域の活用効率を向上させることのできる色変換装置及び色変換プログラムを得る。
【解決手段】出力側デバイスの色再現域である出力色再現域の外郭を、入力側デバイスの色再現域である入力色再現域の外郭に近づけるように補正することにより補正色再現域を生成し(ステップ102)、前記入力色再現域の画像信号である入力画像信号を、前記補正色再現域内にマッピングし(ステップ104)、当該補正色再現域内にマッピングされた画像信号を、前記出力色再現域内の画像信号となるように整合させる(ステップ106)。
(もっと読む)
撮像装置および撮像方法、再生装置および再生方法、撮像画像処理システム
【課題】「人物をかんたんにきれいにとりたい、きれいに見たい。」という希望に対して、AE/AWBなどをPCの現像処理にて行う場合や、記録した画像の再生装置での人物の顔に着目した明るさと色の調整を行う際に、顔検出情報を有効活用して実現提供する。
【解決手段】任意の撮影画像に対して人物の顔の検出を行なってAF/AE/AWB等の調整を行うとともに、記録媒体に画像データを記録する際に、顔検出機能により得られた顔位置情報を画像データに付加して一つのファイルとして生成、記録する撮像装置を提供する。さらに、記録した画像データをPC等で再生表示する際、画像データに付加された顔位置情報を用いた画像処理を、アプリケーションソフトウェアを用いて実行する再生装置および撮像画像処理システムを提供する。上記画像処理においては、再生装置のユーザの意図どおりに画像の顔部分の画質調整を実行することができる。
(もっと読む)
画像処理方法、画像処理プログラム、画像処理装置、カメラ
【課題】入力画像撮影時と出力画像観察時の視環境や照明条件が異なる場合に、精度良く色変換を行なうことができる画像処理方法を提供すること。
【解決手段】入力画像データに対して色変換処理を行う画像処理方法は、入力画像撮影時の日時に関する情報を取得し、入力画像撮影時の位置に関する情報と入力画像撮影時の天気に関する情報の少なくともいずれかを取得し、取得した入力画像撮影時の日時に関する情報と、取得した入力画像撮影時の位置に関する情報と入力画像撮影時の天気に関する情報の少なくともいずれかの情報とに基づき、色変換処理を行う。
(もっと読む)
画像処理装置及び方法並びに車両
【課題】車載カメラの設置誤差を吸収しつつ、広範囲の被写界を表示可能な視界支援システムを提供する。
【解決手段】視界支援システムは、車載カメラの撮影画像を拡張鳥瞰図画像に変換して表示する。視界支援システムは、撮影画像を地面に投影するための第1の変換行列H1を平面射影変換によって求める。一方で、撮影画像を地面と異なる平面に投影するための第2の変換行列H2(例えば、無変換の単位行列)を設定する。拡張鳥瞰図画像を車両近辺に対応する第1領域(253)と車両遠方に対応する第2領域(254)に分割し、第1領域にはH1に基づく鳥瞰図画像を描画する一方で第2領域にはH1とH2とを加重加算した加重加算変換行列に基づく画像を表示する。第1及び第2領域の画像が滑らかに接合されるように、両領域間の境界からの距離に応じて加重加算の重みを変更する。
(もっと読む)
ひずみ画像表示システム
画像化物体のひずみ画像データを表示する方法であって、前記物体の画像化領域における前記物体の変形を規定するひずみ画像データを取り込み、前記画像化領域において変化する前記ひずみ画像データの品質の尺度を具有する局所的画像品質データを定め、前記物体の前記画像化領域の前記ひずみ画像データの描画を表示し、前記局所的画像品質データを用いて、前記画像化領域において変化する前記表示された描画の品質の視覚表示を提供し、または、前記ひずみ画像データの前記表示された描画の品質を改善する、方法。 (もっと読む)
1,941 - 1,960 / 4,067
[ Back to top ]