
Fターム[5B057DA16]の内容
Fターム[5B057DA16]に分類される特許
1 - 20 / 4,067
車両用運転支援装置
画像処理装置、画像処理方法及びコンピュータプログラム
撮像装置、画像処理プログラム、画像処理方法、および画像処理装置
画像処理装置、画像処理方法、および撮像装置
X線撮影装置のX線照射制御部、X線制御装置、X線撮影装置の制御方法、プログラム及び記憶媒体
画像処理装置、画像処理方法及びプログラム
画像処理装置および内視鏡システム
俯瞰映像生成装置、俯瞰映像生成方法、映像表示システムおよびナビゲーション装置
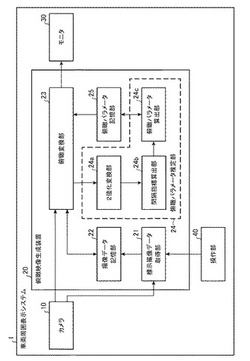
【課題】撮像画像を俯瞰画像に変換する変換パラメータを簡易に調整できる俯瞰映像生成装置、俯瞰映像生成方法、映像表示システムおよびナビゲーション装置を提供する。
【解決手段】俯瞰変換部23が、画像を射影変換により俯瞰画像に変換する俯瞰パラメータを記憶する俯瞰パラメータ記憶部25から読み出した俯瞰パラメータを用いて、カメラ10により撮像された撮像画像を俯瞰画像に変換し、間隔指標算出部24bが、等間隔のパターンの標示が撮像された撮像画像を変換した俯瞰画像上で標示のパターンの間隔が揃う度合を示す間隔指標値を算出し、俯瞰パラメータ算出部24cが、算出された間隔指標値に基づいて、俯瞰画像上で標示のパターンの間隔が所定の範囲内で揃う俯瞰パラメータを算出して俯瞰パラメータ記憶部25に記憶する。
(もっと読む)
デジタルコンテンツのメタデータを生成するための方法および装置

【課題】メタデータの生成が行われている最中に、すでに生成されたメタデータをレビューできるようにする、デジタルコンテンツのメタデータを生成する。
【解決手段】メタデータ生成は、複数の処理タスクに分割されて(30)、その処理タスクは、2以上の処理ノードに割り振られる(31)。2以上の処理ノードによって生成されたメタデータは、収集されて(36)、そして出力ユニット上で可視化される(36)。
(もっと読む)
ステレオ画像生成装置、ステレオ画像生成方法及びステレオ画像生成用コンピュータプログラム
【課題】各カメラによる画像上で特徴点が偏在している場合に算出された補正パラメータが適切か否かを判断可能なステレオ画像生成装置を提供する。
【解決手段】ステレオ画像生成装置は、被写体が写った第1及び第2の画像から抽出された被写体上の同一の点に対応する複数の特徴点の組に基づいて補正パラメータを算出する補正パラメータ算出部12と、各特徴点の組について補正パラメータを用いて少なくとも一方の画像上の特徴点の位置を補正して、補正後の特徴点間の距離を求めることで補正誤差量を算出する補正誤差算出部13と、特徴点の偏在度を求める偏在度算出部14と、偏在度が大きいほど補正誤差量に対する閾値を小さくするようにその閾値を決定する閾値決定部15と、補正誤差量が閾値以下である場合に補正パラメータを用いて第1及び第2の画像のうちの少なくとも一方における被写体の位置を補正する補正部17とを有する。
(もっと読む)
画像読取装置及び地色補正プログラム
【課題】地色補正により低濃度抜き領域が見難くなることを抑制すること。
【解決手段】画像処理装置は、読取データに基づき、原稿画像に、背景色よりも低い画像濃度で打ち抜かれた領域である低濃度抜き領域が有るかどうかを判断する領域有無判断処理と、低濃度抜き領域が無いと判断した場合、読取データに対し、原稿画像の地色濃度に応じた地色補正を行い、低濃度抜き領域が有ると判断した場合、少なくとも当該低濃度抜き領域及びその背景領域の読取データに対し、地色補正を行わない補正切替処理と、を実行する。
(もっと読む)
画像処理装置、及びプログラム
【課題】異なる地域における環境光の違いによって生じる色再現の変化に応じて、より高い自由度で撮影画像を補正する。
【解決手段】カラーLUT71は、撮影時に撮像部4で取り込まれた画像データのRGB特性を、人間の目の色に対する特性(三刺激値)に合致させるように変換するための変換テーブルである。制御部2は、ユーザによる操作部3、またはタッチパネル61の操作に従って撮影地を設定し、次いで変換先の地域を設定し、設定した撮影地と変化先の地域とから、対応するカラーLUT71の補正パラメータを選択する。レリーズ操作があると、撮像部4による撮影処理を行い、選択したカラーLUT71の補正パラメータに従って撮影した画像のRGB値を変換する画像処理を行う。
(もっと読む)
画像処理装置、および画像処理方法、並びにプログラム
【課題】距離画像や視差画像に含まれるエラーを低減する補正処理を行う画像処理装置、方法を提供する。
【解決手段】被写体までの距離情報または視差情報を有する距離画像を入力し、距離画像に含まれるエラー信号を検出し、画像領域単位のエラー度合いに応じた合成係数を出力するエラー判定処理部と、距離画像に対するローパスフィルタを適用してノイズ低減距離画像を生成するローパスフィルタ処理部と、距離画像と、ノイズ低減距離画像の合成処理により補正距離画像を生成する距離画像合成部を有し、距離画像合成部は、エラー判定処理部の出力する画像領域単位の合成係数に従って、画像領域単位で距離画像とノイズ低減距離画像の合成比率を設定した合成処理を実行して補正距離画像を生成する。
(もっと読む)
画像処理装置、顕微鏡システム、画像処理方法、及び画像処理プログラム
【課題】非蛍光色素によって染色された標本において、非蛍光色素が発する自家蛍光波長帯域を特定することができる画像処理装置等を提供する。
【解決手段】画像処理装置30は、非蛍光染色が施された標本を互いに異なる複数の波長帯域で撮像することにより取得された複数の画像を入力する画像入力部32と、入力された複数の画像に基づいて、標本が発する自家蛍光を表す特徴量としての蛍光強度を算出する蛍光強度算出部351とを備える。
(もっと読む)
会話映像表示システム
【課題】視聴者が会話人物の視線方向を分かりやすく、会話人物の存在感を感じられる会話映像表示システムを提供する。
【解決手段】会話画像及び会話の各人物の頭部姿勢データを処理して会話状況を映像表示するシステムであり、各人物の位置と対応して配置された複数のスクリーン403と、各スクリーン403に各人物毎の画像を投影する映像投影装置401と、スクリーン403の姿勢を制御するアクチュエータ402と、スクリーン403の姿勢を、それに投影される画像中の人物の頭部姿勢と同期して変化させるべく、頭部姿勢データからアクチュエータ402の制御信号を生成する制御信号生成手段303と、画像上における各人物の顔領域を検出する顔位置検出手段301と、画像中の検出された顔領域を中心とした領域を、その人物の画像が投影されるスクリーン403の姿勢に応じて写像して映像投影装置401に出力する画像写像生成手段302を有する。
(もっと読む)
画像処理装置、画像処理方法及びコンピュータプログラム
【課題】検査対象物の表面の彩度、色相等をより正確に再現することができ、欠陥検出精度の低下を防止することができる画像処理装置、該画像処理装置で実行する画像処理方法及びコンピュータプログラムを提供する。
【解決手段】検査対象物を撮像する撮像素子を有する撮像部と、該撮像部で取得した画像データに対して画像処理を実行する画像処理部とを備える。撮像部は、撮像素子で撮像されたカラー画像を、ダイナミックレンジを広げる変換特性に基づいてHDR画像に変換して出力する。画像処理部は、撮像部から出力されたHDR画像の画素ごとの色成分値を変換特性に基づいて逆変換し、逆変換された色成分値から、画素ごとに明度及び色成分値の比を算出し、算出した明度を変換特性に基づいて変換し、変換された明度と算出した色成分値の比とに基づいて、補正後HDR画像を生成する。
(もっと読む)
画像処理装置及び該画像処理装置で用いる判定閾値設定方法
【課題】ヒストグラムを目視で確認しつつ、検査対象物の良否を判定する基準である判定閾値を容易に設定することができる画像処理装置及び該画像処理装置で用いる判定閾値設定方法を提供する。
【解決手段】撮像部で撮像された検査対象物の画像と、事前に記憶してある検査対象物と比較する基準となるマスタ画像との一致度を算出する。複数の検査対象物について算出した一致度の度数分布を示すヒストグラムを表示し、撮像部で撮像された検査対象物について算出した一致度を、表示されたヒストグラムに対応付けて表示する。ヒストグラムと一致度とが同じ画面上に表示された状態で、検査対象物の良否判定に用いる閾値を設定する。
(もっと読む)
超音波診断装置及び画像処理装置
【課題】管腔内を簡便に観察することができる超音波診断装置及び画像処理装置を提供すること。
【解決手段】実施の形態の超音波診断装置は、トレースライン設定部と、カーブドMPR画像生成部と、制御部とを備える。トレースライン設定部は、超音波プローブから送信される送信信号を被検体に3次元的に走査することで収集された3次元画像データに含まれる管腔に芯線を設定する。カーブドMPR画像生成部は、トレースライン設定部によって設定された芯線を含む断面の2次元画像を、3次元画像データから当該芯線に沿って生成する。制御部は、カーブドMPR画像生成部によって生成された2次元画像を所定の表示部にて表示させる。
(もっと読む)
画像処理装置
【課題】 下地除去処理の設定において、RGB成分に応じた3個のスライダを用いるUIでは、ユーザはRGBの各成分を座標軸とする3次元空間の1点を指定しなければならず、閾値を設定することが困難であるといった課題がある。一方、下地領域と非下地領域を指定するUIでは、非下地として指定したい画像部分の面積が小さい場合には、領域内に占める出現頻度が小さいために非下地と判断されない場合があり、ユーザの意図とは異なる閾値が決定されてしまうといった課題がある。
【解決手段】 画像データにおいて、下地除去処理を適用したくない非下地領域を選択し、その中に含まれる下地処理対象外となる例外色の設定を行う。非下地領域に含まれる色の中から減色処理を用いて少なくとも1色の代表色を決定し、その中から例外色を選択することで、簡単な操作で下地と非下地を容易に判別する閾値を設定することができる。
(もっと読む)
画像検出装置
【課題】染色された試料に含まれる細胞の所定の情報をより明確に検出することができる。
【解決手段】第1の光学系106は、第1のスペクトルと第2のスペクトルを重ね合わせたスペクトルを有する光を照射する。第3の光学系109は、第2の光学系108からの光が入射され、第1の波長領域の光と第2の波長領域の光とを分けて出射する。第1の撮像部111は、第3の光学系109からの第1の波長領域の光が入射され、第1の波長領域の光による標本スライド101の画像を撮像する。第2の撮像部113は、第3の光学系109からの第2の波長領域の光が入射され、第2の波長領域の光による標本スライド101の画像を撮像する。画像処理部114は、第2の撮像部113が撮像した標本スライド101の画像を用いて第1の撮像部111が撮像した標本スライド101の画像に含まれる細胞の所定の情報の強調処理を行う。
(もっと読む)
1 - 20 / 4,067
[ Back to top ]