
Fターム[5B057DA17]の内容
Fターム[5B057DA17]に分類される特許
61 - 80 / 2,237
画像処理装置、画像処理方法、プログラム
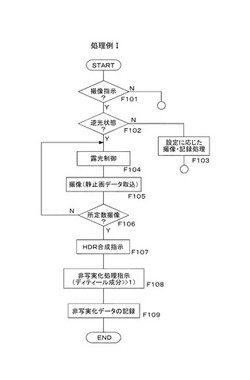
【課題】逆光状態で撮像された画像データについて多様な画像効果を付与する。
【解決手段】処理対象の複数の画像データが、逆光状態での撮像による画像データか否かを判断する(F102)。そしてこの処理対象の複数の画像データについてHDR合成等の合成処理を実行する(F107)。さらに逆光状態での撮像による画像データであったら、合成処理に係る画像データについて、非写実的な画像内容(例えば絵画調)となる画像効果処理を実行する(F108)。
(もっと読む)
印刷物検査用センサのデータ変換方法及びデータ変換装置

【課題】構造の異なる新たなセンサに変更した場合でも変更前のセンサ用基準データを利用して印刷物を検査できるようセンサデータを変換する。
【解決手段】ラインセンサによって計測したデータ上に、ポイントセンサによる検査領域の計測を再現する領域を設定し、設定された領域に含まれる画素値を重み係数によって変換して検査データを生成するために、必要な領域設定パラメータや重み係数をシミュレーションによって決定する。シミュレーションは、ポイントセンサで計測に利用する光や投受光素子の状態を考慮して設定したパラメータに基づいて行う。決定したパラメータ及び重み係数を利用して検査媒体をラインセンサによって計測したデータを変換し,ポイントセンサ用基準データと比較可能な検査データを生成する。
(もっと読む)
入力画像における歪を検出する方法、入力画像における歪を検出する装置およびコンピューター読み取り可能な媒体
【課題】書物などのスキャン画像は背に近い所に歪みを有する。歪みを検出し、補正する方法を提供する。
【解決手段】特徴画像を用いてスキャンされた本の画像を分割化しページ領域に対応するピクセルをマップしページオブジェクトを作成してページの縁を検出する。ページオブジェクトの2つの間にある無地の背景領域を見つけ、ページ縁を分析してその形状を検出し、形状を分析して本の背の終端点を検出することにより本の背領域が検出される。ページ縁を用いて特徴画像を調べ、ピクセル値の上から下および下から上の下降勾配を検出し元のスキャンされた画像における影歪みの角を判定する。締め付けおよび湾曲歪みも検出される。ベジェ曲線を用いてページ上で検出された3つの歪みの各々をモデル化する。検出された歪みはまず台形の補正領域を定義することにより補正される。強度、締め付け、および湾曲補正が次に台形の補正領域内の線に沿って適用される。
(もっと読む)
画像処理装置および画像処理方法
【課題】高詳細な画像を得るために被写体をフラッシュ撮影すると、実際の環境光下では観察されるであろう被写体の陰影が消失して立体感が損なわれる場合がある。
【解決手段】S1でのユーザ指示に基づき、S2で被写体をフラッシュ撮影した第1の画像データと、蛍光灯などの観察光源下で撮影した第2の画像データを取得する。そしてS3で第1および第2の画像データの照明ムラを補正した後、S4で第1および第2の画像データにおける平均明度の比を用いて、画素ごとの明度補正パラメータを算出する。そしてS5で、該明度補正パラメータを用いて第1の画像データにおける画素ごとの明度を補正する。これにより、観察光源下で被写体に生じる陰影が再現された、高詳細な撮影画像が得られる。
(もっと読む)
画像処理方法および画像処理装置
【課題】迅速かつ有効的に画像ピクセルの顕著性値を分析して、画像における重要物体領域を均一的に表現する。
【解決手段】本発明は、領域のコントラストに基づいて画像の視覚的顕著性を検出する画像処理方法と画像処理装置に関するものである。当該方法は、自動分割アルゴリズムを用いて入力画像を複数の領域に分割する分割ステップと、前記複数の領域のうちの一つの領域とその他の領域との色、の差分の重み付き和を利用して、当該領域の顕著性値を算出する算出ステップとを含む。
(もっと読む)
画像処理装置及び画像処理プログラム
【課題】対象とする画像内に有彩色領域が存在する場合に、画像全体に、原稿色に対応したかぶりを除去するときに生じる輝度値が明るくなりすぎてしまうことを防止するようにした画像処理装置を提供する。
【解決手段】画像処理装置の抽出手段は、画像から領域を抽出し、選択手段は、前記抽出によって抽出された領域を予め定めた規則に基づいて選択し、測定手段は、前記選択手段によって選択された領域内の画素の輝度値を測定し、推定手段は、前記測定手段によって測定された画素値から、前記受付手段によって受け付けられた画像におけるかぶりの度合いを示す関数を推定し、除去手段は、前記推定手段によって推定された関数に基づいて、前記受付手段によって受け付けられた画像からかぶりを除去する。
(もっと読む)
3D自動色補正装置とその色補正方法と色補正プログラム
【課題】カラーチャート等の参照板を用いなくても、低コストかつ安定して、映像から自動的に色補正パラメータを算出し、左右映像間の色補正を遂行することができる3D映像のための自動色補正装置を提供することを目的とする。
【解決手段】撮影して取得した二つの映像間において色補正を遂行する色補正装置において、取得した二つの映像から画素値の色ヒストグラムを各々算出する色ヒストグラム算出部と、色ヒストグラム算出部が算出した色ヒストグラムから確率密度関数を各々算出する確率密度関数算出部と、確率密度算出部が算出した各々の確率密度関数からロバストM推定による色補正パラメータを算出する色補正パラメータ算出部とを備え、色補正パラメータ算出部が算出した色補正パラメータを、取得した二つの映像の少なくともいずれか一方に適用して色補正する色補正装置とする。
(もっと読む)
情報処理システム、情報処理装置、および情報処理方法
【課題】携帯端末に応じた写りの画像を提供することができるようにする。
【解決手段】写真シール機1において利用者により選択された画像は、利用者により入力されたメールアドレスとともに管理サーバ3に送信され、管理サーバ3が有する記憶媒体に保存される。保存先を表すURLを含む電子メールが管理サーバ3から携帯端末2に送信され、利用者が携帯端末2を操作して電子メールに含まれるURLに対するアクセスを指示したとき、URLに基づいてアクセスが行われ、写真シール機1から管理サーバ3に送信しておいた画像が携帯端末2のモニタに表示される。携帯端末2の利用者は、写りが異なる複数の画像の中から好みの写りの画像を選択することができるようになされている。本発明は、写真シール機を含むシステムに適用することができる。
(もっと読む)
信号処理回路と画像読取装置と画像形成装置
【課題】 SSCG変調による画像データの変動プロファイルが三角波形状でない場合でも、また画像データと変動プロファイルとの位相ズレを起こすことなく、画像データの補正を適切に実施できるようにし、且つライン周期に制約を持たせること無く、万が一補正残りが発生した場合にも縦スジにはならないようにする。
【解決手段】 補正部50では、原稿への光照射開始前のタイミングジェネレータ10からの変調周期信号に同期したタイミングで、AFE20から1ライン毎にSSCG3による変調周期の間に出力される画素数分の画像データを平均化回路62が任意回数分だけ繰り返し取得して平均化し、変動プロファイルとしてメモリ61に記憶する。その後、原稿への光照射開始後のタイミングジェネレータ10からの変調周期信号に同期したタイミングで、減算回路52がAFE20から出力される画像データの各画素値から上記変動プロファイルの各画素値を対応する画素毎に減算する。
(もっと読む)
三次元点群位置データ処理装置、三次元点群位置データ処理方法、三次元点群位置データ処理システムおよびプログラム
【課題】三次元点群位置データの処理の途中経過を知ることができる技術を提供する。
【解決手段】三次元レーザースキャナが測定した三次元点群位置データ(S502)に基づき、解像度を段階的に変えた三次元モデルを作成する(S505)。この際、低解像度の三次元モデルの作成およびその表示(S506)、さらにその後に、ラベリングされたデータを引き継いで(S509)の高解像度の三次元モデルの作成およびその表示を行う。ここで、低解像度の三次元モデルの表示を行うことで、最終的な三次元モデルの完成の途中の段階をユーザが把握することができる。
(もっと読む)
奥行調整が可能な立体映像表示装置
【課題】 背景領域に過度に奥行範囲を割り当てることなく、手前側の奥行感が強調され、自然な奥行感を再現できる立体映像表示装置を提供する。
【解決手段】1実施形態の立体映像表示装置は、入力画像から奥行値を生成する奥行情報生成部11と、前記奥行値を調整し、調整された奥行値を生成する奥行調整部12と、前記入力画像及び前記調整された奥行値から、右視点用画像及び左視点用画像を生成する画像生成部と、前記右及び左視点用画像に基づいて、立体映像を表示する画像表示部14と、を備え、前記奥行調整部12は、各奥行値の頻度に対して、奥行値に応じた重み付けを行うことによって奥行値の重み付きヒストグラムを求め、該ヒストグラムから得られる重み付き累積ヒストグラムを用いて奥行値を調整することを特徴とする。
(もっと読む)
車両のサラウンドビューシステム
【課題】車両のサラウンドビューシステムおよび車両のサラウンドビューを生成するための方法を提供すること。
【解決手段】上記車両のサラウンドビューシステムは、車両の異なる箇所において提供された複数の画像センサーであって、画像センサーは、車両の完全な周囲を覆う車両周囲の画像データを生成する、複数の画像センサーと、複数の画像センサーの画像データを処理する画像処理ユニットであって、画像処理ユニットは、異なる画像センサーの画像データに基づいて車両のサラウンドビューを生成するように構成され、サラウンドビューを生成するために、画像処理ユニットは、車両を囲むボウル上に画像データを逆に投影する、画像処理ユニットと、画像処理ユニットによって生成されたサラウンドビューを表示するディスプレイと、生成されたサラウンドビューが表示されるビューの位置および角度を変更するマニピュレーターとを含む。
(もっと読む)
画像処理装置、表示システム、及び、画像処理方法
【課題】ヒストグラムの度数の集中に起因した不具合を緩和しつつ、ヒストグラムを用いて画像のコントラストを適切に強調する。
【解決手段】画像表示システムでは、ヒストグラム生成部61が表示対象となる画像のヒストグラムを生成し、ヒストグラム補正部62がそのヒストグラムにおける全ての輝度の度数に「1」未満の一定の係数Kを乗算した後、全ての輝度の度数にオフセット値Dを加算してヒストグラムを補正する。そして、ヒストグラム累積部63がこの補正後のヒストグラムの累積ヒストグラムを生成し、画像補正部64がその累積ヒストグラムを補正カーブとして用いて画像の画素値を補正する。したがって、度数の集中に起因した不具合を緩和しつつ、各輝度の度数に応じて画像のコントラストを適切に強調できる
(もっと読む)
画像処理装置および画像形成装置
【課題】 比較的小さい回路規模でハードウェア処理によりバイラテラルフィルターの演算を行う。
【解決手段】 画像処理装置において、LUT3−1,3−2は、注目画素の画素値と近傍画素の画素値との差分絶対値に対応する指数関数部の値を有し、演算回路2は、注目画素の画素値と近傍画素の画素値との差分絶対値を演算し、演算回路4は、その差分絶対値についての、LUT3−1,3−2による指数関数部の値に基づいてバイラテラルフィルターによるフィルタリング後の注目画素の画素値を演算する。
(もっと読む)
電子カメラ
【構成】光学/撮像系12Lは、左側視野を捉える撮像面を有してL側生画像データを出力する。また、光学/撮像系12Rは、右側視野を捉える撮像面を有してR側生画像データを出力する。ここで、左側視野および右側視野は共通視野を部分的に含む。また、共通視野において、R側生画像データのS/N比はL側生画像データのS/N比よりも低く、R側生画像データの解像感はL側生画像データの解像感よりも高い。信号処理回路14LはL側生画像データに基づいてYUV形式のL側画像データを作成し、信号処理回路14RはR側生画像データに基づいてYUV形式のR側画像データを作成する。画像合成回路24は、こうして作成されたL側画像データおよびR側画像データを共通視野を基準として合成する。
【効果】合成画像の作成に要する時間の短縮化と合成画像の品質の向上とが図られる。
(もっと読む)
画像処理装置および方法、プログラム、並びに記録媒体
【課題】画像のノイズを低減させるために、正確にノイズを計測することができるようにする。
【解決手段】第n−1番目のフレームの画像に対して時間加算ノイズ低減処理が施された画像をNR画面とし、NR画面に対する動き補償が行われ、入力された画像のデータにおいて第n番目のフレームの画像を入力画面とし、入力画面の画素値と動き補償されたNR画面の画素値から得られる所定の値を、時間加算ノイズ低減処理における巡回履歴に基づいて補正することで、入力画面のノイズが計測され、計測されたノイズに対応する加算比率が決定され、決定された加算比率に応じて定まる係数を乗じることにより、入力画面の画素値および動き補償されたNR画面において対応する画素値とを重み付け加算することで、入力画面に前記時間加算ノイズ低減処理が施される。
(もっと読む)
ステレオ画像処理装置、ステレオ画像処理方法、及び、ステレオ画像処理プログラム
【課題】広角レンズを使用した場合でも、当該周辺部でも鮮鋭感がある優れた画像が得られるだけではなく、測距精度も高い技術を提供すること。
【解決手段】ステレオ画像処理装置は、撮影レンズ101、102および撮像素子103、104を備える2組の映像信号出力部と、信号処理回路105と、周辺解像補正回路106と、測距回路107を備えている。映像信号出力部からの映像信号は、信号処理回路105に出力される。信号処理回路105は、この映像信号に信号処理を行い周辺解像補正回路106に出力する。周辺解像補正回路106は、複数ある映像信号出力部のそれぞれに対応付けられて設けられており、映像信号出力部からの出力信号である映像信号に補正を加えて鮮鋭化する。測距回路107は、上述の映像信号補正部のそれぞれにより補正が加えられた複数の映像信号に基づいて、撮像内の各画素と被写体と距離を演算して測距値を求める。
(もっと読む)
撮像システム、階調補正方法、及び電子情報機器
【課題】表示画面を分割して得られる複数の分割領域の各々に対して、入出力特性(補正強度)を適切に設定することができ、これにより、広ダイナミックレンジの画像での白飛びや黒潰れを回避しつつ、隣接する分割領域の境界で補正強度が不連続になるのを防止する。
【解決手段】イメージセンサから出力される出力信号のダイナミックレンジを調整するダイナミックレンジ調整部100aを、表示画面を分割して得られる複数の分割領域毎に画像の特徴を抽出する領域特徴抽出部130と、抽出された各分割領域の画像の特徴に基づいて、該分割領域の各画素毎に入出力特性を設定する入出力特性設定部140と、設定された入出力特性に基づいて該出力信号の階調レベルを各画素毎に補正する階調補正部150とを備えた構成とした。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】対象画像から高い精度でゴミ影部を検出することのできる画像処理装置を提供する。
【解決手段】撮像素子に撮像された処理対象画像に移り込む影部の輝度情報を用いて、光学部材に付着したゴミによるゴミ影部かを判定する輝度判定部63と、影部の色相情報を用いて、ゴミ影部かを判定する色相判定部64と、影部の彩度情報を用いて、ゴミ影部かを判定する第1彩度判定部65と、第2彩度判定部66と、を有し、影部が、輝度判定部、色相判定部及び第1彩度判定部においてゴミ影部と判定された場合、ゴミ影部と判定し、影部が、輝度判定部及び色相判定部においてゴミ影部と判定され、第1彩度判定部においてゴミ影部と判定されなかった場合、第2彩度判定部における判定を行い、第2彩度判定部においてゴミ影部と選択された場合、ゴミ影部と判定するゴミ判定部を備える。
(もっと読む)
画像処理装置、画像処理方法
【課題】 3頂点曲線メッシュを効率的に符号化するための技術を提供すること。
【解決手段】 メッシュ毎に、辺毎の情報と該メッシュ中の頂点毎の色を記述したメッシュデータを生成する。辺毎に、該辺の情報と、該辺の両端の情報と、該辺がエッジ線から生成されたものか否かを示すフラグ値と、該辺上の各頂点の色と、該辺の制御点の座標と、を記述した辺データを生成する。
(もっと読む)
61 - 80 / 2,237
[ Back to top ]