
Fターム[5B057DA20]の内容
Fターム[5B057DA20]に分類される特許
21 - 40 / 763
不審者検知装置、不審者検知方法およびプログラム
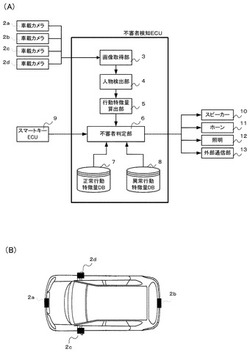
【課題】カメラ画像から不審者を自動的に検知する。
【解決手段】不審者検知装置は、撮影手段と、撮影手段によって撮影された画像から人物を抽出する画像解析手段と、抽出された人物の行動特徴量を所定時間おきに算出し、行動特徴量の度数分布を求める度数分布解析手段と、前記度数分布解析手段によって求められた行動特徴量の度数分布に基づいて、抽出された人物が不審者であるか否かを判定する判定手段と、を備える。行動特徴量としては、移動速度、移動方向の変動量、所定の対象物との間の距離、頭の高さを例示できる。正常行動と不審行動についての行動特徴量度数分布をあらかじめ記憶しておき、これと画像から得られた行動特徴量度数分布を比較することで不審者を検知する。あるいは、画像から得られた行動特徴量度数分布のばらつきに基づいて不審者を検知することもできる。
(もっと読む)
全焦点画像生成方法、全焦点画像生成装置、全焦点画像生成プログラム、被写体高さ情報取得方法、被写体高さ情報取得装置及び被写体高さ情報取得プログラム

【課題】焦点位置が異なる複数の撮像画像から画素位置ごとに焦点が合った画像及び高さ情報を、大域的な領域に亘って適切に焦点が合うように生成する。
【解決手段】焦点位置が異なる複数の画像を取得する(ステップS1)。各画像からグレースケール画像を取得する(ステップS5)。グレースケール画像にウェーブレット変換を施し、多重解像度画像を生成する(ステップS6〜S13)。多重解像度画像に基づいて焦点位置に関する確率分布を生成する(ステップS14)。確率分布に基づくコスト関数とペナルティ関数とを足し合わせた評価関数が最小になるような最適な焦点位置を、確率伝播法を用いて、画素位置ごとに近似的に算出する(ステップS17〜S20)。最適な焦点位置から、画素位置ごとに焦点が合った画像及び高さ情報を生成する(ステップS22)。
(もっと読む)
画像生成装置、画像生成方法、画像生成装置用プログラム
【課題】オクルージョンに対応でき、低コストで、より少ない演算量で画像を生成する。
【解決手段】複数の撮像装置により第1位置から撮像された第1画像と第2位置から撮像された第2画像の入力を受け付け(S1)、各画像の各画素の色相を求める色相変換を行い(S3)、色相変換された各画像から特徴点を抽出し(S6)、第1画像と第2画像とにおいて対応する特徴点を求め(S7)、対応する特徴点の間の距離を有する視差ベクトルを算出し(S8)、同一画像内における特徴点の間の特徴点間距離を算出し(S10)、特徴点間距離に基づき、第1位置および第2位置いずれか一方から見えない領域に関するオクルージョン情報を求め(S11)、第1位置と第2位置との間に第3位置を設定し(S9)、第3位置の位置関係と、視差ベクトルと、オクルージョン情報とに従い、第3位置から撮像された場合の第3画像を生成する(S13)。
(もっと読む)
雑音除去装置
【課題】雑音除去フィルタとしての雑音除去処理の能力を担保しつつ、雑音除去フィルタとしてのハードウェア的な規模を縮小することが可能な雑音除去装置を提供する。
【解決手段】一定方向の走査線Lにより順次走査される複数の画素Pxにより形成されるデジタル画像における中心画素Px24の輝度と、当該中心画素Px24の周囲の複数の他の画素Pxの輝度と、を用いて、フィルタ対象領域Fにおける雑音除去処理を行う場合に、フィルタ対象領域Fにおいて走査線L上に並ぶ画素Pxの輝度を記憶し、且つフィルタ対象領域Fにおける走査線Lの数に対応した数のラインメモリを備えるとき、フィルタ対象領域Fにおける走査線L上の画素Px11乃至画素Px17の数が、走査線Lに垂直な方向の画素数より大きくされている。
(もっと読む)
データ構造、コンピュータプログラム、及びデータ取得装置
【課題】一般的な3次元画像データ作成ソフトウェアを用いた場合であっても、3次元画像データにシミュレーション対象の識別データを付与することを可能としつつ、データ形式の変換に伴う識別データの欠損を抑制する。
【解決手段】部品データ20は、シミュレーション装置10において、生産ラインのシミュレーションに用いられる。部品データ20は、部品の3次元画像を特定する部品形状データ21と、部品を識別するデータである部品識別データ23と、を備えている。部品識別データ23は、部品の3次元画像に対して描かれるQRコード画像のデータとして指定されている。
(もっと読む)
データ構造、コンピュータプログラム、及びデータ取得装置
【課題】一般的な3次元画像データ作成ソフトウェアを用いた場合であっても、3次元画像データにシミュレーション対象の識別データを付与することを可能としつつ、データ形式の変換に伴う識別データの欠損を抑制する。
【解決手段】部品データ20は、シミュレーション装置10において、生産ラインのシミュレーションに用いられる。部品データ20は、部品の3次元画像を特定する部品形状データ21と、部品を識別するデータである部品識別データ23と、を備えている。部品識別データ23は、部品の3次元画像に対して描かれるQRコード画像のデータとして指定されている。
(もっと読む)
自分撮り判断装置、撮像装置、プログラム及び自分撮り判断方法
【課題】簡易かつ高精度に自分撮りを判断することができる。
【解決手段】撮像素子によって撮像された画像から顔領域を検出する顔領域検出手段(S109、S111)と、検出された顔領域の左下領域および右下領域の少なくとも一方の合焦状態を検出する合焦状態検出手段(S117)と、合焦状態検出手段によって検出された左下領域および右下領域の少なくとも一方の合焦状態が予め定められたレベルより低い場合に、自分撮りと判断する判断手段と、を備えた。
(もっと読む)
データ構造、コンピュータプログラム、及びデータ取得装置
【課題】一般的な3次元画像データ作成ソフトウェアを用いた場合であっても、3次元画像データにシミュレーション対象の識別データを付与することを可能としつつ、データ形式の変換に伴う識別データの欠損を抑制する。
【解決手段】部品データ20は、シミュレーション装置10において、生産ラインのシミュレーションに用いられる。部品データ20は、部品の3次元画像を特定する部品形状データ21と、シミュレーションの実行時に表示される表示用テクスチャのテクスチャデータ22と、部品を識別するデータである部品識別データ23と、を備えている。テクスチャデータ22は、部品の3次元画像に対して第1倍率で描かれる画像のデータとして指定され、部品識別データ23は、部品の3次元画像に対して第1倍率よりも小さい第2倍率で描かれるQRコード画像のデータとして指定されている。
(もっと読む)
レコメンドシステム、レコメンド方法およびプログラム
【課題】取得したユーザ顔画像を用いることにより、ユーザに事前登録作業を行わせることなく、ユーザの属性を利用したレコメンドを行う。
【解決手段】携帯端末が、ユーザの顔画像を取得し、取得したユーザの顔画像から特徴量を抽出する。次に、抽出した特徴量をレコメンドサーバに送信する。レコメンドサーバは、携帯端末から特徴量を受信し、少なくとも複数の特徴量を格納し、受信した特徴量と格納された特徴量とのマッチング処理を行い、マッチング結果に基づいて、アプリケーション等のレコメンドを行って、レコメンド結果を携帯端末に送信する。そして、携帯端末が、レコメンドサーバからレコメンド結果を受信し、受信したレコメンド結果を表示する。
(もっと読む)
画像処理装置および画像処理方法
【課題】中間視点画像の生成にかかる計算コストを抑えつつ、ピントを合わせたい領域の画質を向上させること。
【解決手段】撮像対象を含む撮像シーンの深さ方向の位置を示すデプス値を推定し、デプスマップ308を生成する。ピントマップ生成処理部309は、仮想ピントパラメータ305およびデプスマップ308に基づき、領域分割処理によりピントを合わせたい領域(ピント内領域)とぼかしたい領域(ピント外領域)を示すピントマップ310を生成する。ピント内領域画像処理部311は、ピントを合わせる領域であるピント内領域に重点を置いた画像処理を行い、ピント内領域画像312を生成する。ピント外領域画像処理部313は、ピント外領域に重点を置いた画像処理を行い、ピント外領域画像314を生成する。画像ブレンド処理部315は、画像のブレンド処理によりリフォーカス画像316を生成する。
(もっと読む)
顔分析装置、顔分析方法、及びプログラム
【課題】講義中の受講生の画像等を用いることにより、講義に関する適切な分析を行うことができる顔分析装置を提供する。
【解決手段】講義中における1以上の受講生の顔を撮影した動画像である受講生画像が格納される受講生画像格納部12と、受講生画像から受講生の顔を認識して、認識した顔に対する分析を行う顔分析部13と、顔分析部13による分析結果に関連する情報を出力する出力部17とを備えるようにしたことにより講義に関する分析を行う。
(もっと読む)
笑顔判定装置及び方法
【課題】人それぞれの顔の作りや笑顔の程度が異なっても、笑顔の判定精度を向上させることができる笑顔判定装置を提供する。
【解決手段】顔検出器11と顔検出プログラム181は画像内の顔を検出する。顔器官検出器15と顔器官検出プログラム84は顔器官情報を検出する。笑顔度検出プログラム182は顔器官情報に基づいて笑顔度を検出する。登録部186は、笑顔を指示していない状態での通常顔画像情報と、笑顔を指示していない状態での笑顔非指示時笑顔度と、笑顔を指示した状態での笑顔指示時笑顔度とを登録する。顔認証器16と顔認証プログラム185によって顔が認証されたら、笑顔判定プログラム183は、現在の笑顔度と笑顔非指示時笑顔度と笑顔指示時笑顔度とを用いて笑顔であるか否かを判定する。
(もっと読む)
閉瞼を分類するための方法
【課題】乗り物の操作者コンパートメント内に位置決めされた操作者を監視する画像センサからの生理学的データの部分の信頼性を向上させる
【解決手段】画像センサから、操作者の目、顔、頭、腕、および身体の動きのうちの少なくとも1つに関係する情報を包含する生理学的データを受信するステップと、前記生理学的データに基づいて、少なくとも操作者の閉瞼、目の動き、または頭の動きの徴候の識別を行なうステップと、生理学的データおよび操作者コンパートメント内における照明条件のうちの少なくとも1つと、現在の操作者の状態についてのあらかじめ決定済みの規則のセットとの比較を行なうステップと、閉瞼、目の動き、および/または頭の動きのタイプを、識別による閉瞼、目の動き、および/または頭の動きと比較の結果を相関させることによって分類するステップと、を包含する。
(もっと読む)
画像評価装置、撮像装置およびプログラム
【課題】 簡易な操作で画像の評価にユーザの嗜好を反映させる。
【解決手段】 画像評価装置の画像評価部は、各々の候補画像から特徴量を抽出するとともに、特徴量を変数とする評価式を用いて複数の候補画像のうちから代表画像を選出する。表示処理部は、代表画像および複数の候補画像を表示装置に表示させる。入力部は、候補画像のうちから最適画像の指定を受け付ける。学習処理部は、代表画像の選出後に最適画像の指定があったときに、最適画像が代表画像として選出されるように評価式を調整する。
(もっと読む)
人物トラッキング及びインタラクティブ広告
【課題】広告の有効性を良好に評価及び判定する広告システムを提供する。
【解決手段】システムは、ディスプレイを備えた、ディスプレイを通じて潜在顧客に広告コンテンツを提供するように構成された広告ステーションと、この広告ステーションに潜在顧客が接近すると、この潜在顧客の画像を捕捉するように構成された1つ以上のカメラとを含む。本システムは更に、データ処理システムを含み、捕捉された画像を解析することにより、潜在顧客の視線方向及び身体姿勢方向を判定し、判定された視線方向及び身体姿勢方向に基づいて、広告コンテンツにおける潜在顧客の関心度を判定する。
(もっと読む)
再生表示装置、再生表示プログラム、再生表示方法、および画像処理サーバー
【課題】複数の画像を順次再生するにあたって、単調な画像の遷移とはならず、楽しむことのできる画像処理装置、画像処理方法、画像処理プログラム、および画像表示装置を提供する。
【解決手段】内容分析部55におけるチャットの分析結果は、表情切換部59に送られる。表情切換部59は、画像記録部58に記録された写真画像等の画像中の人物画像に対して、表情切換画像処理部と同様に、顔の顔パーツに対して表情の変化を施した画像、若しくは画像記録部58から読出したそのままの画像を、仮想空間と関連付け部57を介して仮想空間合成表示部53に送る。
(もっと読む)
画像処理装置および方法、プログラム
【課題】 撮像画像データ中に鏡面反射光の成分が含まれている場合であっても、被写体までの距離を高精度に推定することを目的とする。
【解決手段】 偏光面が角度が異なる偏光フィルタが装着された複数のカメラにより撮像された複数の偏光画像データに基づき、被写体の鏡面反射光の強度と偏光面の角度との少なくとも何れか一方を推定し、その結果に基づいて被写体までの距離を推定する。
(もっと読む)
撮像装置
【課題】 複数の主撮像光学系を備えず、従来の撮像操作と同じ操作によって立体画像の撮像をする撮像装置に関する。
【解決手段】 複数の測距レンズに対向して配置された副撮像素子を有してなる測距光学系、各副撮像素子の受光面に結像された被写体像に基づく画像データを用いて被写体までの距離を算出する被写体距離算出手段、被写体までの距離から2次元の距離マップ画像を生成する距離マップ画像生成手段、主画像と距離マップ画像の各画像特徴量とを算出する画像特徴量算出手段、各画像特徴量を用いて主画像と距離マップ画像をマッピングしたデータを生成するマッピングデータ生成手段、マッピングデータと距離マップ画像を用いて2次元奥行き情報画像を生成する2次元奥行き情報画像生成手段、2次元奥行き情報画像から3次元視差画像を生成する立体画像生成手段、を有してなる撮像装置による。
(もっと読む)
目視対象物判定装置、目視対象物判定方法および目視対象物判定プログラム
【課題】目視者の目視する対象物を正確に判定すること。
【解決手段】目視者1の画像データを基にして、目視者1の視線1aを検出し、視線1aの先の視点位置1bを算出する。目視対象物判定装置100は、表示装置10に表示される対象物10A〜10Cの特徴を取得する。目視対象物判定装置100は、目視者の視点位置1bおよび対象物10A〜10Cの距離と、各対象物10A〜10Cの特徴とを基にして、各対象物が目視者に目視されているか否かを判定する。
(もっと読む)
環境認識装置及びプログラム
【課題】環境認識の精度を向上させることができる環境認識装置及びプログラムを提供すること。
【解決手段】被写体を撮像することにより得られた画像を、明度情報に基づき同一の物体である可能性が高い領域に分割し、同一の分割領域に存在する複数の特徴点となる画素の距離情報に基づいて、特徴点以外の画素の距離情報を補完して距離画像を生成し、注目画素の距離情報に基づいて特徴量を抽出するためのウインドウのサイズを変更し、該ウインドウ内の画素から注目画素の特徴量を抽出し、抽出した特徴量と予め求めておいた対象物毎の特徴量とを比較することにより画素毎に物体を識別し、分割領域内の画素の識別結果を統合して、分割領域毎に対象物を識別して環境認識を行う。
(もっと読む)
21 - 40 / 763
[ Back to top ]