
Fターム[5B057DA20]の内容
Fターム[5B057DA20]に分類される特許
101 - 120 / 763
点群位置データ処理装置、点群位置データ処理システム、点群位置データ処理方法、および点群位置データ処理プログラム
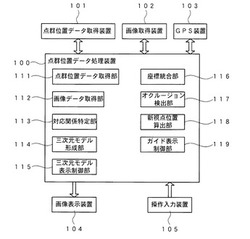
【課題】オクルージョンが解消される新たな視点の位置を決めるための情報を作業者に提供する技術を提供する。
【解決手段】測定対象物の点群位置データを取得する点群位置データ取得部111、測定対象物の画像データを取得する画像データ取得部112、第1の視点において取得された点群位置データと第1の視点とは異なる第2の視点において取得された画像データとの対応関係を求める対応関係特定部113、点群位置データから三次元モデルを形成する三次元モデル形成部114、この三次元モデルを画像表示装置に表示するための制御を行う三次元モデル表示制御部115を備えている。ここで、三次元モデル形成部114は、対応関係特定部113で特定された対応関係に基づき、第2の視点から見た向きの三次元モデルを形成する。この第2の視点から見た三次元モデルが作業者に画像として提示される。
(もっと読む)
情報処理装置、および情報処理方法、並びにプログラム

【課題】不確実で非同期な入力情報に基づく情報解析により、ユーザ位置や識別情報、発話者情報などを生成する構成を実現する。
【解決手段】画像情報や音声情報に基づいてユーザの推定位置および推定識別データを含むイベント情報を入力し、入力イベント情報に基づいて、各ユーザの位置およびユーザ識別情報を含むターゲット情報と、イベント発生源の確率値を示すシグナル情報を生成する情報統合処理部を有し、情報統合処理部は、識別器を備えた発話源確率算出部を有し、該発話源確率算出部において識別器を用いて入力情報に基づく発話源確率を算出する。例えば、ユーザ位置情報、ユーザ識別情報、口唇動作情報の対数尤度比を算出して、イベント発生源の確率値を示すシグナル情報を生成する。
(もっと読む)
測距装置及び撮像装置
【課題】視差算出にかかる処理時間を考慮して視差算出に用いる画素を適切に選択する。
【解決手段】対象物までの距離を測定する測距装置であって、2つの撮像手段と、2つの撮像手段のうち一方の撮像手段により撮像された画像に対し、視差算出の対象画像のサイズに応じて、視差算出画素を選択するための複数の処理から1つを決定する決定手段と、決定手段により決定された処理に基づき、対象画像から視差算出画素を選択する選択手段と、選択手段により選択された視差算出画素と、他の撮像手段により撮像された画像のうち、選択された視差算出画素に対応する画素とを用いて視差データを算出する算出手段と、を備える。
(もっと読む)
撮像装置及び撮像方法
【課題】操作者のジェスチャに応じた撮影制御を行う際に、操作者の存在位置の制約を減少させる。
【解決手段】画像データを取得する複数の撮像部と、複数の撮像部のそれぞれの撮像方向と撮像画角の少なくとも一方を個別に変更して撮像範囲を変更する撮像範囲変更部と、いずれか1つの撮像部が取得した画像データから操作者のジェスチャを検出するジェスチャ検出部と、検出されたジェスチャに応じて、記録すべき撮像範囲の変更制御及び複数の撮像部に対する撮影指示を含む撮像制御を行う撮像制御部とを備え、撮像制御部は、記録すべき撮像範囲の変更制御に際して、撮影範囲変更手段を制御して、複数の撮像部のうちの一部の撮像部である本撮像部の撮影範囲をジェスチャ検出部で検出したジェスチャに応じて変更させるとともに、本撮像部の撮像範囲から操作者が含まれなくなる場合は本撮像部以外の撮像部の撮像範囲の変更を操作者が含まれる範囲に制限する。
(もっと読む)
3次元形状測定機の校正方法及び3次元形状測定機
【課題】撮像系の歪み補正を行うことができる3次元形状測定機の校正方法、及び、この校正方法により校正された3次元形状測定機を提供する。
【解決手段】被検物16にライン光を投影するライン光投影装置15と、投影されたライン光の像を取得する計測カメラ11と、を有し、被検物16の3次元座標を算出する3次形状測定機1において、3次元座標に含まれる計測カメラ11の歪みを補正する校正方法であって、物体面上に設置した基準点の像を取得するステップと、この像に基づいて、像面から物体面上の座標に座標変換した基準点の3次元座標(変換座標)を求めるステップと、基準点の予め測定された3次元座標と変換座標とを最小二乗式によりフィッティングしてフィッティング係数を求めるステップと、このフィッティング係数により、補正データを算出するステップと、を有する。
(もっと読む)
三次元形状計測装置、三次元形状計測装置のキャリブレーション方法、およびロボット装置
【課題】複数の方向から計測対象物体を撮像して三次元形状を計測する三次元形状計測装置のキャリブレーションを、簡便な作業で短時間に行う。
【解決手段】三次元形状計測装置1は、キャリブレーション用ブロックと、撮像部12−1,12−2がそれぞれ撮像した撮像画像領域から、キャリブレーション用ブロックの上面に照射されたスリット光による光切断線をそれぞれ検出する光切断線検出部23と、光切断線検出部23がそれぞれ検出した光切断線から特徴点をそれぞれ検出して二次元座標値を取得する特徴点検出部24と、二つの撮像画像領域それぞれにおける特徴点の二次元座標値を単一の二次元座標系の二次元座標値に変換するための座標変換パラメーターを計算する座標変換パラメーター計算部25とを備えた。
(もっと読む)
画像解析を用いた携帯デバイスにおけるビューの向きの選択
【課題】携帯デバイスのディスプレイに表示されるビューの向きを設定するための方法、システムおよびコンピュータプログラムを提供する。
【解決手段】方法は、ディスプレイの正面のエリアの画像を取得するオペレーションを含む。さらに、前記ディスプレイの正面のエリアに人が位置するとき、人の顔の特徴の位置を特定する。この方法は、前記特徴の位置にもとづいて前記顔の軸を決定する別のオペレーションを含む。さらに、前記顔の軸に実質的に対応するように、携帯デバイスの前記ディスプレイ上に表示されるビューの向きを設定する。
(もっと読む)
仮想環境におけるオブジェクトの選択方法
【課題】ジェスチャコマンドに基づく、簡単であり懇親的なユーザインタフェースを提供すること。
【解決手段】本発明は、第1の仮想環境における第1のオブジェクトの選択方法に関し、第1のオブジェクトは、第1の環境内で、閾値未満の値のサイズで表される。第1のオブジェクトの選択をより懇親的にするために、本方法は、・ユーザの指示ジェスチャに関連づけられた方向(120)を推定するステップと、・前記推定された方向(120)に従って、第2のオブジェクト(12)を判定するステップであって、前記第2のオブジェクトは、前記閾値より大きい値のサイズを有する、ステップと、・前記第2の判定されたオブジェクト(12)に従って、前記第1のオブジェクト(112)を選択するステップとを含む。本発明は、選択方法の実装に適合されたマルチメディア端末(18)にも関する。
(もっと読む)
電子透かし埋込装置及び電子透かし検出装置
【課題】切取耐性の向上と画質劣化の抑制を同時に実現することができるようにする。
【解決手段】電子透かしビットとして0を埋め込む場合、関数値fvと0代表値KV0の差分Δ0が閾値Th以上であれば、その差分Δ0が閾値Th未満になるようにビット埋込対象画像を構成している各画素の画素値を編集するビット埋込処理を実施し、電子透かしビットとして1を埋め込む場合、関数値fvと1代表値KV1の差分Δ1が閾値Th以上であれば、その差分Δ1が閾値Th未満になるようにビット埋込対象画像を構成している各画素の画素値を編集するビット埋込処理を実施する。
(もっと読む)
画像処理装置、画像処理方法およびプログラム
【課題】動きのある対象の形状を高密度かつ高フレームレートに計測可能な画像処理装置、画像処理方法およびプログラムを提供する。
【解決手段】画像処理装置10と、カメラ28と、プロジェクタ24と、プロジェクタ26とで、3次元空間中に存在する物体30の2次元画像を撮影し、撮影された2次元画像から物体の3次元形状を復元している。プロジェクタ24は物体30に対して横方向のパターンを照射し、プロジェクタ26は物体30に対して縦方向のパターンを照射している。そして、これらのパターンが物体30で反射したパターン光をカメラ28で撮影することで2次元画像を取得し、この2次元画像から画像処理装置10により3次元画像を復元している。
(もっと読む)
人検出方法
【課題】従来技術にともなう問題の少なくとも緩和または解決を目的とする。
【解決手段】人の検出を含む方法を開示する。例えば、実施形態では、画像センサから、検出空間の画像(例えば、熱画像、赤外線画像、可視光画像、3次元画像)を受け取る。実施形態では、この1つ以上の画像に基づき、検出空間に人がいることを検出する。また、実施形態では、検出した人の1つ以上の特徴を決定する。特徴の例としては、1つ以上のデモグラフィックカテゴリへの所属及び/またはその人の動作などを含むが、これらに限定されない。さらに、実施形態では、こうした人検出と特徴決定に基づき、出力装置へのコンテンツの配信を制御する。
(もっと読む)
情報処理装置及び方法、並びにプログラム
【課題】精度良い3Dモデルを効率良く得ることを可能にする。
【解決手段】撮像制御部21は、投影装置13が動作していない状態と投影装置13が対象物体に所定のドットパターンを投影している状態とで、撮像装置12に対象物体を撮像させて、テクスチャ画像のデータ、第1ドット画像のデータと第2ドット画像のデータの複数の組からなる複数の3Dモデル画像セット候補を取得する。3Dモデル画像セット選抜部25は、複数の3Dモデル画像セット候補に含まれる複数の撮像画像のデータのうち、移動量の総和が最も小さくなるテクスチャ画像並びに第1ドット画像及び第2ドット画像の組を、3Dモデル画像セットとして選抜する。
(もっと読む)
地形情報表示装置および表示方法
【課題】利用者による3次元地形モデルの標高情報の正当性の評価を補助することが可能な地形情報表示装置および方法を提供する。
【解決手段】本発明の地形情報表示装置は、評価対象の3次元地形モデルが示す領域をそれぞれ異なる方向から撮影した2つの撮影画像をその3次元地形モデル情報に基づいてそれぞれ正射変換した2つのオルソ画像を生成する。そして、2つのオルソ画像の全画素について各画素を中心とした予め定められた範囲の画素の画素値の分散を算出し、2つのオルソ画像の対応する画素対についての分散の差分絶対値に応じて色付けした差分画像を生成し、生成した差分画像と3次元地形モデル情報を画像で表したモデル画像を並べて表示する。
(もっと読む)
ステレオ画像による3次元位置姿勢計測装置、方法およびプログラム
【課題】ステレオ誤対応データが含まれていても、対象物の3次元位置姿勢を計測することができる装置、方法及びプログラムを提供する。
【解決手段】3次元位置姿勢計測装置は、撮像装置C1〜C3によって対象物を撮像して得られた画像データを受信する入力部4と演算部1とを備え、演算部が、重複することなく選択された2枚の画像データのペアに関して、3次元復元点集合および特徴量集合を求め、各ペアに関する3次元復元点集合および特徴量集合を、全て加算して全3次元復元点集合および全特徴量集合を求め、対象物のモデルデータに関するモデル特徴量集合を、全特徴量集合と照合することにより、3次元復元点集合の中から対象物のモデル点に対応する点を決定し、3次元復元点集合が、画像データ中の対象物の境界線を分割したセグメントの3次元位置情報を含み、特徴量集合が、セグメントの頂点に関する3次元情報を含む。
(もっと読む)
画像処理装置、画像処理プログラムおよび画像処理方法
【課題】複数の自然現象が混在する画像であっても、適切なサイズの領域ごとに自然現象を特定すること。
【解決手段】画像処理装置100は、予め決めた対象領域110について、まず、全領域を対象としてヒストグラム101を作成する。例示したヒストグラム101の場合、自然現象を特定できるような特徴が表れていない。そこで、画像処理装置100は、対象画像110の領域を4つに分割する。そして、4つに分割された各領域を対象としてヒストグラム102を作成する。ヒストグラム102の場合、右上の領域と、左下の領域には、自然現象を特定できるような特徴が表れている。したがって、2つの領域(右上、左下)については、そのまま自然現象を特定して、特定結果を保持する。反対に、右下の領域と、左上の領域には、自然現象を特定できるような特徴が表れていない。そこで、画像処理装置100は、2つの領域(右下、左上)をさらに4つに分割する。
(もっと読む)
環境認識ロボット
【課題】環境認識動作の処理負荷を軽減させることができる環境認識ロボットを提供すること。
【解決手段】本発明にかかる環境認識ロボットは、ロボット本体11、センサ12、処理部13を備える。センサ12は、ロボット本体11に搭載され、周囲の物体に照射したレーザ光20の反射光を受光することにより検出される当該物体までの距離情報を含む測定データを生成する。処理部13は、測定データに基づいて、周囲の物体を認識する。アーム112には、センサ12から照射されたレーザ光20に対する反射光の強度が、センサ12が検出可能な強度以下となる反射部材が設けられている。
(もっと読む)
画像処理方法および画像処理装置
【課題】少ないメモリ容量で、電子的手振れ補正を高精度に実行することが可能な画像処理方法および画像処理装置を提供することを目的とする。
【解決手段】連続して撮影された画像1、画像2をフレームメモリ6に格納し、フレームメモリ6に格納された画像1、2の複数の参照エリアから画像を補正用画像としてそれぞれ切り取り、複数の画像1、画像2の補正用画像を使用して、画像1と画像2が精度よく重なるような手振れ補正量を算出し、画像1を算出した手振れ補正量で補正し、補正した画像1をフレームメモリ6に格納された画像1に上書きし、補正した画像1と画像2を合成して合成画像を生成し、合成画像をフレームメモリ6に格納された画像2に上書きする。
(もっと読む)
3次元距離計測装置及びその方法
【課題】曲面のエッジ部分等における形状計測精度の向上を図り正確なギャップ計測を行う3次元距離計測装置及びその方法を提供する提供する。
【解決手段】画像を撮影する複数の撮像装置と、計測対象物が所定範囲で重なるように撮像装置を回転させて光軸を調整する回転駆動装置とを備えた3次元撮影手段と、複数の画像に写された所要計測点の画素の位置対応付け情報を演算する対応付け演算処理手段と、位置対応付け情報と回転駆動装置の回転情報とを用いて計測対象物の3次元形状を演算する3次元形状演算処理手段と、3次元形状から計測対象物の3次元形状が得られない領域の3次元形状を推定する3次元形状推定演算処理手段と、推定結果より計測対象物上において指定された2点の距離計測点の3次元座標を演算する3次元計測座標演算処理手段と、これらの3次元座標を用いて2点間の距離を演算する距離演算処理手段とを備えた。
(もっと読む)
ステレオマッチング処理装置、ステレオマッチング処理方法、及び、プログラム
【課題】ステレオ画像について、同一の点を撮像している各画像中の対応点を求めるのに好適なステレオマッチング処理装置等を提供する。
【解決手段】本発明に係るステレオマッチング処理装置100は、2つの画像を受け付ける画像受付部110と、当該2つの画像にマージン値に基づくマージン領域を付加して分割する画像分割部160と、当該2つの画像を縮小する画像縮小部120と、マージン領域が付加された分割された2つの画像から、基準の視差を設定する基準視差設定部130と、縮小された2つの画像のうち最大の視差値及び最小の視差値を算出する視差算出部140と、分割された2つの画像に付加されるマージン領域の幅値を示すマージン値を予め設定し、最大の視差値又は最小の視差値が当該マージン値より大きい場合、最大の視差値又は最小の視差値を、当該マージン値と設定するマージン設定部150と、を備える。
(もっと読む)
画像処理装置、プログラムおよび画像処理方法
【課題】 術前後において脳の形態的変化が生じた場合であっても、術後の脳の形態を術前の形態に補正し、脳血流量等を適切に比較することができる画像処理装置を提供する。
【解決手段】 画像処理装置は、術前および術後の脳血流画像を入力し、術前および術後の脳血流画像を解剖学的標準画像に変換し、術前の脳血流画像から解剖学的標準画像への変換に用いた変換パラメータを記憶しておく。次に、術前の脳血流画像の変換に用いた変換パラメータを用いて、術後の脳血流画像の解剖学的標準画像を逆変換して術前の脳の形態に対応する術後の脳血流画像の補正画像を得て、術前の脳血流画像と逆変換によって得られた補正画像とを比較して脳血流量の増減を求め、術前の脳の形態画像に重畳して脳血流量の増減を示す情報を表示する。
(もっと読む)
101 - 120 / 763
[ Back to top ]