
Fターム[5B057DA20]の内容
Fターム[5B057DA20]に分類される特許
121 - 140 / 763
農作物情報管理システム
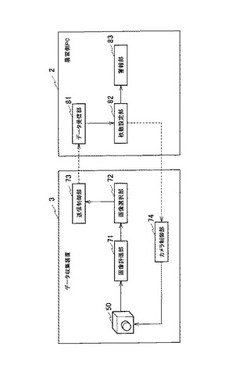
【課題】農地の環境変化に拘わらず鮮明な農地の画像を取得する。
【解決手段】農地における農作物の情報を取得するデータ収集装置3と、当該データ収集装置3から農作物の情報が送信される情報処理装置2とを含む農作物情報管理システムにおいて、データ収集装置3が、1回の撮像動作により複数の画像を撮像する撮像手段50と、各画像のうち農作物画像を含む評価領域における合焦評価値を算出する画像評価手段71と、各画像の合焦評価値のうち最も高い合焦評価値が算出された画像を選択する画像選択手段72と、選択された画像を情報処理装置2に送信する送信手段73とを備える。
(もっと読む)
立体画像の分析方法及び分析装置

【課題】画像の立体ペアの右目画像と左目画像とを識別する場合に、統計的な推定への依存を減らす立体画像の分析方法を提供する。
【解決手段】立体ペアの左目及び右目画像を識別するための方法であって、画像を比較して、一方の画像だけに可視である遮蔽された領域を探すステップと、画像境界を検出するステップと、画像境界が前記遮蔽された領域の左側の境界と一直線になる右目画像を識別し、画像境界が前記遮蔽された領域の右側の境界と一直線になる左目画像を識別するステップと、を含む。
(もっと読む)
医療用途のデジタルX線画像の対象領域における明るさレベルを計算する方法
本発明は、ニューラルネットワークを用いた画像ヒストグラムによる、医療用途のデジタルX線画像の対象領域における明るさのレベルを評価する方法に関する。計算は、画像取得と、画像ヒストグラム計算と、ヒストグラム値の、ニューラルネットワークの入力引数への変換と、取得するニューラルネットワークの出力値とを備える。ニューラルネットワークの入力引数として、所与の階級幅により計算され、単位に正規化されたヒストグラム値が用いられる。明るさのレベルは、ニューラルネットワークの出力値の線形関数として計算される。ニューラルネットワーク学習が、所与の画像データベースに基づき計算された学習セットを用いて行われる。対象領域全体の各画像について計算され、ニューラルネットワークの出力層におけるニューロンの活性化関数の範囲に対してスケーリングされた、明るさのレベルが、目標値のセットとして用いられる。  (もっと読む)
(もっと読む)
画像処理装置および画像処理方法
【課題】対象物の形状や処理の目的などに応じて、個々の部位を詳細に計測するのに必要な処理シーケンスを自由に設定できるようにし、その設定のための操作性を高める。
【解決手段】指定操作受付部106は、モデルデータ記憶部103を用いて対象物の全体形状を示す画像を生成し、この画像を含み、処理項目の選択が可能な設定画面を表示して、共通処理用の処理シーケンスを設定するための操作と、部位別処理用の処理シーケンスを設定するための操作と、部位別処理の処理対象部位を指定する操作とを受け付ける。共通処理用の処理シーケンスは、部位別処理を実行することを定義した処理項目を含み、この項目を介して共通処理用および部位別処理用の各処理シーケンスが対応づけられて登録される。また、指定された処理対象部位に対するモデルデータ中の対応データを表す情報が、部位特定情報として、部位別処理に紐付けられた状態で登録される。
(もっと読む)
ステレオカメラ装置
【課題】計測対象物の距離に応じて計測の距離分解能を可変にして、安定かつ高精度に距離測定を行うステレオカメラ装置を提供すること。
【解決手段】ステレオカメラ装置1は、二枚の画像を取り込み、その取り込んだ各画像の一部領域の解像度を変更し、その解像度が変更された各画像の一部領域の視差に基づいて車両から一部領域に写像されている計測対象物までの距離を計算する。これにより、計測対象物が遠距離に存在しかつその大きさが小さい場合でも、安定に距離計測処理を行うことができる。
(もっと読む)
画像処理シミュレーション方法及び画像処理シミュレーションプログラム
【課題】画像処理装置の画像処理方式に適した処理時間予測を行うことにより、予測誤差を小さくする。
【解決手段】シミュレータ20は、画像処理装置10の画像処理部11の画像処理方式に合わせた処理時間予測関数24の係数を、画像処理部11が評価用コンテンツ22の画像処理に要した処理時間に基づいて決定する関数係数算出部23と、画像処理部11が実行用コンテンツ30を画像処理するのに要する予測処理時間を処理時間予測関数24を演算して予測する処理時間予測部25と、実行用コンテンツ30をシミュレーション用に画像処理すると共に、この画像処理に要する処理時間を調整して予測処理時間に一致させる画像処理シミュレーション部26とを備える。
(もっと読む)
共通画像平面決定プログラム、共通画像平面決定方法、および共通画像平面決定装置
【課題】被写体の立体的処理にかかる精度が十分に確保できる共通画像平面を決定する共通画像平面決定プログラムを提供する。
【解決手段】コンピュータは、第1のステップで、2つのカメラの撮像中心を結ぶ基線軸に平行な回転軸を含む基準共通画像平面を設定する。コンピュータは、第2のステップで、予め設定されている複数の回転角度毎に、第1のステップで設定した基準共通画像平面を、前記回転軸において回転させた判定対象共通画像平面を設定する。コンピュータは、第3のステップで、第2のステップで設定した判定対象共通画像平面毎に、カメラの撮像画像が投影される投影画像領域を検出する。そして、コンピュータは、第4のステップで、第3のステップが検出した投影画像領域の大きさに基づいて、第2のステップで設定した判定対象共通画像平面中から、共通画像平面を選択し決定する。
(もっと読む)
情報処理装置および情報処理方法
【課題】安価かつ小型に実現でき、高速かつ正確に非接触にジェスチャー等のターゲット・オブジェクトを認識することができる装置を提供する。
【解決手段】一方の視差画像を2以上のレベルを持つグレイスケール画像に変換する手段と、前記変換したグレイスケール画像から所定方向に連続する同一レベルを有する連続画素群をオブジェクトとして抽出し、前記オブジェクトごとに、該オブジェクトの位置及び予め定めた最大許容視差値に基づいて、前記一方の視差画像において基準領域を設定するともに、他方の視差画像において探索エリアを設定し、前記基準領域の画像をテンプレートとして前記探索エリア内においてテンプレートマッチングを行うことにより基準領域に類似する類似領域を探索し、基準領域と類似領域の位置の差に基づいて該オブジェクトに関する視差値を決定する手段と、を備える。
(もっと読む)
シンクライアントシステム、シンクライアントサーバ、シンクライアント端末、プログラム及び記憶媒体
【課題】画面転送型のシンクライアントシステムにおいて、端末に表示される機密情報が不正に撮影されて機密情報が流出したときの流出元を特定する。
【解決手段】端末3は、入力情報をサーバ2に送信する(S11)。サーバ2は、アプリケーションを実行し(S12)、サーバ側画面データを作成し(S13)、前回作成したサーバ側画面データと今回作成したサーバ側画面データとを比較し、今回作成したサーバ側画面データの中で差のある部分のみを差分データとして作成し(S14)、差分データに対し、特定パターンを埋め込み(S15)、特定パターンを埋め込んだ差分データを圧縮し(S16)、端末3に送信する(S17)。端末3は、データを受信して解凍し(S18)、前回の端末側画面データに対して、解凍して得た差分データを更新して端末側画面データを作成し(S19)、表示装置37に表示する(S20)。
(もっと読む)
顔画像処理方法およびシステム
【課題】
顔をリアルにアニメーション化する。
【解決手段】
複数の異なる光源で1つの顔を照射し、記照射からレンジマップデータを測定し、照射からイメージデータを測定し、汎用顔テンプレートをレンジマップデータに適用して、レンジマップデータに関連するノイズを拒絶し、レンジマップデータから3次元面を導出し、3次元面に対する面法線を計算し、面法線およびイメージデータを処理してアルベドマップを計算し、アルベドマップが、特殊タイプのテキスチャマップであり、当該特殊タイプのテキスチャマップでは、各サンプルが、顔の3D面の記述に加えて、面上の特定ポイントにおける顔面の拡散反射率を記述するものであり、光源が、静止した測定装置に対して一定位置にある、ことを特徴とする顔画像処理方法。
(もっと読む)
放射線撮影装置
【課題】被検体の呼吸の周期を正確に知って診断の目的に合致した撮影を確実に行うことができる放射線撮影装置を提供する。
【解決手段】本発明の構成によれば、まず、低線量で動画撮影を行って、リアルタイム検出データLを取得し、その後に、高線量で診断用の静止撮影を行って静止検出データSの取得を行う。X線管制御部6は、この動画撮影を通じてX線の照射を開始する時点を決定して、本撮影である静止撮影を行う。この様にすれば、実際の肺を透視しながら静止画像の撮影タイミングが決められるので、狙い通りのふくらみ具合で被検体の肺を静止撮影することができる。これにより、被検体の病状の変化を観察しようとして撮影時期の異なる2枚の静止画像を比較すれば、病状の変化を的確に認識することができる。
(もっと読む)
柵状欠陥検出装置および柵状血管検出方法
【課題】動画データ等の多量の画像データからバレット食道等の注目する性状の判定を効率良く行うことができる柵状欠陥検出装置を提供する。
【解決手段】食道内の粘膜表面を撮像した医用画像から線構造を抽出する線構造抽出手段と、前記線構造の持つ形状特徴量から胃側となる各終端を算出する終端算出手段と、前記形状特徴量から抽出された線構造が柵状血管であるか否かを判定する柵状血管判定手段と、を具備することを特徴とする。
(もっと読む)
画像生成方法、画像生成装置、及びプログラム
【課題】計算機リソースを節約しつつ、被写体以外の場所の見栄えを悪くすることなく、適切に画像を生成する。
【解決手段】被写体を複数の視点位置から撮影した元画像中から、被写体の重要部位が撮影されている領域を検出し(ステップS2)、重要部位が撮影されている検出領域と複数の視点位置の幾何的な条件とから空間中重要部位領域を推定し(ステップS3)、空間中重要部位領域が空間中で被写体が存在する被写体存在領域であると想定し、基準視点から見た被写体の中間画像を生成する(ステップS4)。中間画像中から重要部位領域を切り出し画像として切り出す(ステップS5)。元画像からベース画像を選択し(ステップS6)、ベース画像の重要部位が存在する領域に、切り出し画像を合成する(ステップS7)。
(もっと読む)
画像処理装置、画像処理プログラム、及び画像処理方法
【課題】対象物を表す複数の画像に基づいて精度良く対象物の立体画像を生成できる画像処理装置、画像処理プログラム、及び画像処理方法を提供する。
【解決手段】画像処理装置100は、対象物を表す第1画像を特徴付ける複数の第1特徴点と、対象物を異なる方向から表す第2画像を特徴付ける第2特徴点とを抽出する特徴点抽出部120と、第1特徴点との相対距離が所定の距離範囲に属する他の第1特徴点の数で当該第1特徴点を特徴付ける第1相対位置特徴量と、第2特徴点との相対距離が距離範囲に属する他の第2特徴点の数で当該第2特徴点を特徴付ける第2相対位置特徴量とを算出する相対位置特徴量算出部130と、第1相対位置特徴量と第2相対位置特徴量とで第1特徴点と第2特徴点とを対応させる特徴点対応部150と、対応した第1特徴点と第2特徴点とを用いて対象物を表す立体画像を生成する立体画像生成部180と、を備える。
(もっと読む)
立体映像調整装置及び調整方法
【課題】オクルージョン領域の推定や情報を保持することなく、ステレオ画像における前景と背景の視差量を調整する。
【解決手段】
立体映像調整装置は、複数のカメラで前景物体と背景物体が撮影され、ステレオマッチングの対応点が取られた画像に対して、前景物体が写っている画像領域と前景物体との重畳によって別の視点位置からは隠ぺいされる背景の領域を合わせた領域を通過する画像勾配の小さい領域を連結したパスを複数本取得する手段と、背景画像において画像勾配の小さい領域を連結したパスを複数本取得する手段と、それらのパス上のピクセルを削除または複製することによって、ステレオ視を行った際に前景物体と背景物体の奥行量の差が異なる疑似画像を作成する手段を備える。
(もっと読む)
契約支援サーバ、契約支援システム及び契約支援システムの制御方法
【課題】契約を締結するための手続きの効率化を図る。
【解決手段】契約支援サーバ200を提供する。契約支援サーバ200は、運転免許証を撮像して得た確認データD1を携帯電話機100から受信可能であり、各々が締結すべき契約内容に関連して事前に用意された複数の申込データD2を管理する。また、契約支援サーバ200は、確認データD1を受信する受信部240と、複数の申込データD2を記憶する記憶部220と、受信した確認データD1に対応する申込データD2を記憶部220から読み出す読出処理と、受信した申込データD2と読み出された申込データD2とに基づいて、締結すべき契約の条件及び内容を示す契約データを生成する生成処理を実行する情報処理部210とを備える。
(もっと読む)
画像処理装置、画像処理方法及び画像処理用プログラム
【課題】高精度にカメラ移動の検出を可能とする。
【解決手段】移動可能なカメラにより撮像された画像における1フレーム中のm×m(m:2以上の整数)画素を1ブロックとして、時間的に前後のフレームにおける対応する複数のブロックについてそれぞれの輝度データによる行列を前後のフレーム分作成する行列作成手段21と、前記対応する行列を用いて共分散行列を生成する生成手段22と、前記共分散行列から固有値及び固有ベクトルを求め、固有値及び固有ベクトルに基づき前後のフレームの対応する各ブロック間のユークリッド距離を求める演算手段23と、ユークリッド距離と閾値とを比較して比較値を検出する検出手段24と、前記検出手段による検出結果に基づき前記カメラの移動を判定する判定手段25とを具備する。
(もっと読む)
立体物識別装置、並びに、これを備えた移動体制御装置及び情報提供装置
【課題】撮像画像中の輝度に明確な違いがない立体物と平面物体との間を、撮像手段を用いて高い精度で識別することを課題とする。
【解決手段】撮像領域内に存在する立体物を識別する立体物識別装置であって、物体からの反射光に含まれている偏光方向が互いに異なる2つの偏光(P偏光とS偏光)を受光してそれぞれの偏光画像(P偏光画像とS偏光画像)を撮像する偏光カメラ10と、画素ごとにP偏光画像とS偏光画像との間における輝度差分値の輝度合計値に対する比率である差分偏光度を算出する差分偏光度画像処理部15と、この差分偏光度を用いて撮像領域内の物体が立体物であるか否かの立体物識別処理を行う立体物識別部18とを有する。
(もっと読む)
ステレオ映像内の視差探索範囲を求めるための方法及びシステム
【課題】シーンのステレオ画像のセットに基づいて該シーンの現在のステレオ画像のための視差探索範囲を求めるためのシステム及び方法を提供する。
【解決手段】ステレオ画像のセットからステレオ画像のサブセットを選択するステップであって、該サブセットは現在のステレオ画像及び少なくとも1つの隣接するステレオ画像を含み、該隣接するステレオ画像は現在のステレオ画像に時間的に隣接する、選択するステップと、ステレオ画像のサブセット内のステレオ画像毎に視差ヒストグラムを求めるステップであって、1組の視差ヒストグラムを形成する、求めるステップと、1組の視差ヒストグラム内の視差ヒストグラムの重み付けされた和として重み付け視差ヒストグラムを求めるステップと、重み付け視差ヒストグラムから視差探索範囲を求めるステップとを含む。
(もっと読む)
計測システム、画像補正方法、及びコンピュータプログラム
【課題】照明系及び撮像系の双方の測定対象物との位置関係が可変である場合の撮像画像による3次元計測を正確に行う。
【解決手段】照明系101の偏角、撮像系102の偏角を考慮して輝度を補正した場合に想定される空間変調器上の輝度分布(照明系101と撮像系102の双方を考慮した輝度分布補正値)を生成する。この輝度分布補正値と、位置関係に起因しない静的な輝度分布補正値とから、3次元計測システムにおける輝度分布の補正値を生成し、この輝度分布の補正値に基づいて、照明パターン画像の階調変換をし、階調変換した照明パターン画像に従った照明を行う。また、動径の情報と、測定対象物103の反射率とを基に、3次元システムの光量減衰率を求め、この3次元システムの光量減衰率と、基準とする光量減衰率との比較結果から、光源の強度を調整する。
(もっと読む)
121 - 140 / 763
[ Back to top ]