
Fターム[5B057DA20]の内容
Fターム[5B057DA20]に分類される特許
141 - 160 / 763
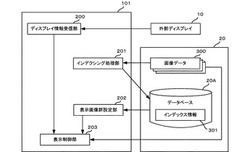
情報処理装置及び画像表示方法
【課題】表示するディスプレイに合わせて、ユーザが視聴しやすい解像度を維持して画像を拡大表示することができる情報処理装置及び画像表示方法を提供することを目的とする。
【解決手段】パーソナルコンピュータ1にて実行されるコンテンツ再生アプリケーション101は、ディスプレイ情報受信部200と、表示画像群設定部202と、表示制御部203とを有する。ディスプレイ情報受信部200は外部ディスプレイ10からディスプレイ情報を受信し、表示画像群設定部202は画像データ300をグループ分けしたインデックス情報301を用いて外部ディスプレイ10に出力する表示候補画像群を設定する。表示制御部203は、ディスプレイ情報受信部200からのディスプレイ情報と、表示画像群設定部202からの表示候補画像群に関する情報とを参照して外部ディスプレイ10に出力する画像データ300を決定する。
(もっと読む)
ステレオ映像内の視差探索範囲を求めるための方法及びシステム

【課題】シーンのステレオ画像のセットに基づいて該シーンの現在のステレオ画像のための視差探索範囲を求めるためのシステム及び方法を提供する。
【解決手段】ステレオ画像のセットからステレオ画像のサブセットを選択するステップであって、該サブセットは現在のステレオ画像及び少なくとも1つの隣接するステレオ画像を含み、該隣接するステレオ画像は現在のステレオ画像に時間的に隣接する、選択するステップと、ステレオ画像のサブセット内のステレオ画像毎に視差ヒストグラムを求めるステップであって、1組の視差ヒストグラムを形成する、求めるステップと、1組の視差ヒストグラム内の視差ヒストグラムの重み付けされた和として重み付け視差ヒストグラムを求めるステップと、重み付け視差ヒストグラムから視差探索範囲を求めるステップとを含む。
(もっと読む)
プログラム、情報記憶媒体及び画像生成装置
【課題】より高速な並列処理を実現すること。
【解決手段】ヒット判定を、メインプロセッサエレメント(MPE10)と複数のサブプロセッサエレメント(SPE)12とで並列処理で実行する。MPE10とSPE12それぞれが分担するノード(ポリゴン集合)の数は、過去のSPEのヒット判定処理結果に基づいてSPEの処理負荷を予測する予測関数f(X)に基づいて、MPE10のヒット判定の処理負荷と、SPE12のヒット判定の処理負荷とがほぼ同等となり、ほぼ同時にヒット判定を終了するように決定する。
(もっと読む)
撮像装置、3Dモデリングデータ生成方法、および、プログラム
【課題】高精度な3Dモデリングデータを容易に生成する。
【解決手段】制御部210は、第1撮像部110と第2撮像部120で撮像する被写体について、当該被写体の明部を適正露出とする露出条件と、暗部を適正露出とする露出条件を設定する。制御部210は、設定した各露出で撮像するよう第1撮像部110と第2撮像部120を制御することで、露出の異なる画像ペアを得る。制御部210は、得られた画像ペアを構成する画像において、パターン投影部130が被写体に投影したパターンを特定する。制御部210は、特定されたパターンについて、同一露出の画像ペアを構成する画像間で、パターンの密度に基づく最適化をおこなうとともに、露出の異なる画像間で、パターンの画像状態に基づく最適化をおこなう。制御部210は、最適化されたパターンの対応点を用いて3Dモデリングデータを生成する。
(もっと読む)
シーンにおける物体の姿勢を求めるためのシステム及び方法
【課題】ロボットピッキングの用途について物体の姿勢を求める。
【解決手段】前処理中、仮想カメラのレンズのまわりに仮想点光源を配置することにより、さまざまな姿勢について物体の3Dモデルがレンダリングされる。影を使用して、複数の方向から照明された物体の配向された奥行きエッジが得られる。配向された奥行きエッジは、データベースに保存される。異なる方向からシーン上に影を投じることによって、カメラがシーンの画像を取得する。シーンは、互いに対して任意の姿勢で配置された1つ又は複数の物体を含むことができる。物体の姿勢は、取得された画像から得られる配向された奥行きエッジを、データベースに保存された配向された奥行きエッジと比較することによって求められる。この比較により、各ピクセルにおいて、面取り照合に基づきコスト関数の値が求められる。これは、滑降シンプレックス最適化を使用して高速化することができる。
(もっと読む)
カメラのミスキャリブレーションの実行時決定のためのシステムと方法
本発明は、シーン内で取得された対象について、教示された対象モデルの観察された画像データと予想された画像データとのマッチングに基づいて定義される実行時アライメント得点の履歴統計定義に基づき、典型的にカメラ外部パラメータに関して、カメラのミスキャリブレーション(精度)の実行時決定(自己診断)のためのシステムと方法を提供する。この構成は、システムのカメラがキャリブレーションされた状態に留まっているか診断するためにビジョンシステムの実行時動作を中断し、および/またはビジョンシステムよって監視されている生産ラインを停止する必要を回避する。ビジョンシステムによって検査される対象または特徴は時間が経過しても実質的に同じであるという仮定の下で、ビジョンシステムは部分アライメント結果の統計を蓄積し、中間結果を保存して現在のシステム精度の指標として使用する。マルチカメラビジョンシステムに対しては、個々の問題のあるカメラを特定するために例示的にクロス確認を用いる。このシステムと方法により、劣化するカメラキャリブレーションに関するビジョンシステムの不具合をより迅速、廉価、簡明に診断することが可能となる。  (もっと読む)
(もっと読む)
物体検出装置
【課題】距離検出手段が検出した距離データを的確にグループ化して物体を的確に検出することが可能な物体検出装置を提供する。
【解決手段】物体検出装置1は、撮像された画像T中の隣接する画素p同士の輝度Dを比較して輝度Dの差分ΔDが閾値ΔDth以内である画素p同士を画素領域gとして統合する統合処理手段10と、画像T中の各画素pについて距離のデータを検出する距離検出手段6と、距離のデータをグループ化して物体P、Qを検出し、画像T中における物体P、Qの範囲を決定する物体検出手段11と、2つの物体P、Qの各範囲内に存在する各画素領域gp、gq同士を比較して、当該2つの物体P、Qについて距離のデータを再度グループ化する際の閾値Δxth、Δzthを可変させる閾値可変手段12と、可変させた閾値Δxth、Δzthに基づいて距離のデータを再度グループ化して物体の再検出を行う再検出手段13とを備える。
(もっと読む)
画像比較および文書認証のための画像位置合わせの方法
【課題】画像比較による文書認証において、有用な画像位置合わせ方法を提供する。
【解決手段】オリジナル文書画像のページの隅近くに、位置合わせマーカとして機能するバーコードスタンプが付加される。バーコードスタンプを含むオリジナル文書画像は印刷、回覧され、その間にオリジナル文書画像はデータベースに記憶される。印刷された文書を認証するには、印刷された文書をスキャンしてターゲット文書画像にし、そのターゲット文書画像が記憶されたオリジナル文書画像と比較される。バーコードスタンプは大域的画像位置合わせを行うための位置合わせマーカとして用いられる。次いで、ターゲット画像およびオリジナル画像は複数のサブ画像に分割され、画像比較を行う前に各サブ画像に対して局所的画像位置合わせが行われる。サブ画像の対から差分サブ画像が生成され、印刷された文書における改ざんを検出するために大域的差分画像にマージされる。
(もっと読む)
半導体集積回路、デバッグシステム、デバッグ方法、デバッグプログラム及び記録媒体
【課題】本発明は、デバッグを高精度に、かつ、効率的に行う半導体集積回路、デバッグシステム、デバッグ方法、デバッグプログラム及び記録媒体に関する。
【解決手段】MFPコントローラボード1の画像処理ASIC13は、I/F21から入力される画像データに対して、複数のアルゴ処理部22a〜22nが適宜の順序で所定の画像処理を施してI/F23から外部に出力するが、デバッグ時に、スキャナエミュレータ110から入力されて、I/F21及びアルゴ処理部22a〜22nから出力される画像データのハッシュ値をハッシュ計算部24a〜24n+1で生成して、それぞれ結果保存レジスタ25a〜25n+1に保持する。この結果保存レジスタ25a〜25n+1のハッシュ値をデバッガ端末100が取り出すことでデバッグすることができる。
(もっと読む)
三次元画像を形成するための識別専用オプトロニックシステムおよび方法
【課題】三次元画像を形成するための識別専用オプトロニックシステム及び方法を提供する。
【解決手段】光センサと、通信手段21、22と、コンピュータ処理手段1とを含み、センサが捕捉した画像から三次元の物体を再構成し、当該再構成に基づいて物体を識別可能にする、物体を識別するためのオプトロニックシステムであって、光センサが、物体5周囲の何通りかの観測角61、62で捕捉された、物体5の表面で反射される電磁放射の輝度レベルを表す物体の画像を記録でき、通信手段21、22が、物体表面で反射される電磁放射の輝度レベルを表す前記物体の画像を処理すべく構成された断層撮影機能によって、三次元で物体を再構成できるよう、前記画像をコンピュータ処理手段1に送信できる。
(もっと読む)
道路認識装置
【課題】車両前方の撮像画像中から車線や横断歩道をリアルタイムで検出可能であり、横断歩道までの距離や横断歩道の距離方向の幅を検出可能な道路認識装置を提供する。
【解決手段】道路認識装置1は、自車両前方を撮像する撮像手段2と、画像T上の水平ラインj上を探索して車線候補点cr、clを検出する車線検出手段10と、車線候補点crに対応する車線の横幅が横断歩道の横幅に相当する横幅であった場合には、当該水平ラインjの探索領域Slを拡大し、当該水平ラインj上で輝度の繰り返しパターンが存在するか否かを判断するパターン探索手段11と、繰り返しパターンが存在する各水平ラインjをグループ化するグループ化手段12とを備え、グループ化手段12は、グループ化したグループの最も手前側の位置までの距離Znearを横断歩道までの距離Zcとして算出し、グループの実空間上の距離方向の幅Wzを横断歩道の幅Wczとして算出する。
(もっと読む)
3次元コンピュータグラフィックス用モデル生成装置
【課題】対象物の形状が簡単でなくても、また、至近距離での撮影でなくても、また、 対象物表面での光の反射が弱かったり強かったりしても、撮影に長い時間をかけずに、対象物の形状に正確な形状の3DCG用モデルを自動的に生成することが、本発明が解決しようとする課題である。
【解決手段】レンズを前または後ろにスライドさせて移動させながら連続的に画像を撮影し、どの画像でピントが合っているかを計算して各画素の位置における奥行き座標を割り出し、三次元形状を求める。
(もっと読む)
周辺環境推定装置、周辺環境推定プログラムおよび周辺環境推定システム
【課題】周辺環境を精度よく推定する。
【解決手段】周辺環境推定装置1は、カメラ1aと、周辺環境推定部10とを備え、移動体に設置されて周辺環境としてロードサイド形状、状況等を推定する。周辺環境推定部10は、周辺物体との距離を測定して周辺環境を推定する。この場合、カメラ1aの位置と撮影方向を認識し、1つ以上の既知の位置である基準経路点から成る基準経路を設定する。そして、カメラ1aで撮影された画像にもとづき、画像内に撮影された周辺物体までの基準経路からの距離を求める。
(もっと読む)
被写体3次元モデルを構築する方法およびプログラム
【課題】高精度な被写体シルエット画像を必要とすることなく、多視点映像をもとに高精度な被写体の3次元モデルを構築する方法を提供する。
【解決手段】本発明の方法は、複数の背景画像の画素値と複数の被写体画像の画素値とから、複数の被写体画像の画素の背景尤度を表す連続値を画素毎に算出し、ボクセル空間中の各ボクセルを被写体画像の各撮影視点に投影し、撮影視点毎の画素を算出し、撮影視点毎の画素での連続値をもとに、ボクセルが被写体領域に属するか否かを判定し、被写体領域を決定する。
(もっと読む)
写真シール作成装置、写真シール作成方法、およびプログラム
【課題】写真シールの作成作業、および作成された写真シールに対する利用者の満足度を向上させることができるようにする。
【解決手段】入力受付制御部212により、奥行きスタンプが選択されたと判定された場合、奥行き回転ボタン表示制御部221は、奥行き回転ボタンを表示する。奥行き操作入力受付制御部222により、奥行き回転ボタンが押下されたと判定された場合、奥行きスタンプ表示制御部223は、その押下操作に応じた角度のスタンプ画像を生成し、編集画面に表示する。奥行きスタンプ合成処理部224は、利用者の操作に従って奥行きスタンプ画像を編集対象画像に貼り付け、表示する。本発明は、例えば、ゲームセンター等に設置される写真シール作成装置に適用することができる。
(もっと読む)
画像処理装置
【課題】車両の走行ルートに沿った路面のデータベース画像を生成することができる技術を提供する。
【解決手段】単眼カメラ3の撮影画像が背景画像取得手段6aにより取得されたときの自車両1の位置情報が位置情報取得手段6bにより取得され、位置情報取得手段6aの自車両1の位置情報に基づいて、生成手段6dにより、各フレームの撮影画像が射影変換された障害物を含まない上方視の画像がつなぎ合わされて、路面領域が連続する路面のデータベース画像が生成される。したがって、走行中の自車両1の単眼カメラ3の撮影画像に基づいて路面のデータベース画像を生成することができるため、例えば通勤の際に単眼カメラ3により撮影された撮影画像から自車両1の走行ルートに沿った路面のデータベース画像を生成することができる。
(もっと読む)
標識および標識使用方法
【課題】標識を画像処理することによって位置および方向に関する情報を得る。
【解決手段】所定箇所に設置される標識2は、軸部4と符号提示部6とを備える。球形の符号提示部6はその球面6aに、異なる複数の視線方向から識別可能な、標識2の位置を示す複数の位置情報符号と、異なる複数の視線方向のうちいずれの視線方向から標識2が視認されているかを示す方向表示と、を有する。複数の位置情報符号は方向表示を兼ねるよう配置されている。つまり、方向表示は複数の位置情報符号8の視認の態様に依存する形で定められる。
(もっと読む)
画像処理装置、方法およびプログラム
【課題】ユーザが撮影画像の代表画像の中から多視点画像の代表画像を容易かつ直感的に識別できる装置を簡易な構成で実現する。
【解決手段】多視点画像サムネイル画像に3次元CG処理を施すことで3次元サムネイル画像を作成するとともに、通常画像からサムネイル画像を作成し、3次元CGサムネイル画像および通常サムネイル画像をLCD10に一覧表示する。3次元CGサムネイル画像および通常サムネイル画像は区別されることなく、LCD10の一画面中に混在して配列される。3次元CGサムネイル画像Xは、3次元CGグラフィック処理が施され立体的効果が付与さているから、通常サムネイルYとの違いが一見して明らかであり、写実的手法を実現する特殊な装置を用いなくとも、多視点画像の縮小画像であることを観者に容易に認識させることができる。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】所望の画像特徴を有する画像処理装置を提供する。
【解決手段】取得した画像上に、主要被写体を含んだ注目領域と、主要被写体を含まない非注目領域とを設定し、注目領域および非注目領域の画素頻度とを比較し、比較結果に基づいて、画像全体の彩度を補正する彩度強調係数と、画像の特定の色を補正する第2色補正量とを算出する。そして、彩度強調係数と第2色補正量とに基づいて撮像素子によって得られた画像を補正する。
(もっと読む)
透視変換パラメータ生成装置、画像補正装置、透視変換パラメータ生成方法、画像補正方法、及びプログラム
【課題】従来の技術では、信頼性の高い2個の画像間の大域的な動きを推定する透視変換パラメータを生成することができない。
【解決手段】透視変換パラメータ生成装置は、第1のフレームと、第2のフレームとを取得する取得部11と、取得された第1のフレームのなかの第1の四辺形の各辺の複数の位置それぞれについて、取得された第2のフレームの対応する位置への動きベクトルを検出する動きベクトル検出部13と、検出された各動きベクトルの始点を第1の四辺形の対応する位置に一致させ、そのときの第1の四辺形の各辺について、全ての動きベクトルの終点を一つの直線で近似的に結び、その結んで得られる4個の直線によって形成される第2の四辺形の4個の頂点の座標と、第1の四辺形の4個の頂点の座標とを用いて、透視変換パラメータを生成する透視変換パラメータ生成部14とを有する。
(もっと読む)
141 - 160 / 763
[ Back to top ]