
Fターム[5B057DB03]の内容
画像処理 (340,757) | 分析部 分析画像の特性 (30,351) | 三次元 (1,504)
Fターム[5B057DB03]に分類される特許
201 - 220 / 1,504
医用画像処理装置、及び医用画像処理プログラム
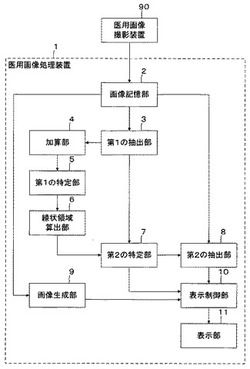
【課題】医用画像から観察領域を自動的に特定することが可能な医用画像処理装置を提供する。
【解決手段】この実施形態に係る医用画像処理装置は、第1の抽出手段と、加算手段と、第1の特定手段と、第2の特定手段と、を有する。第1の抽出手段は、注目臓器を含む領域を表すボリュームデータを受けて、ボリュームデータから空気領域を特定する。加算手段は、ボリュームデータの各画素の画素値を所定の投影方向に沿って加算することにより、画素値の加算値の分布を表す投影画像データを生成する。第1の特定手段は、投影画像データから第1の特徴点を特定する。第2の特定手段は、空気領域において第1の特徴点を通り所定の投影方向に沿って延びる線上の点を第2の特徴点として求める。
(もっと読む)
人物特定装置、人物特定方法及び人物特定プログラム

【課題】顔の正面画像が含まれていない画像情報からでも、人物の特定を可能にすることを目的とする。
【解決手段】画像取得部110は少なくとも3方向から人の画像情報を取得する。3次元モデル生成部120は、画像取得部110が取得した画像情報に基づき、その人を3次元モデルで表した3次元モデル情報を生成して、その人を識別するための情報として3次元モデル情報を3次元モデル記憶部130に記憶させる。その後、画像取得部110は新たに人の画像情報を取得する。人物特定部140は、画像取得部110が新たに取得した画像情報が示す人の姿勢に、3次元モデル記憶部130が記憶した3次元モデル情報の姿勢を変形して、画像情報が示す人と3次元モデル情報とを比較することにより、画像情報が示す人を特定する。
(もっと読む)
三次元地図作成装置およびその窓領域検出装置
【課題】写り込みや日照条件により窓領域の画像が均一にならない場合でも窓領域を高い精度で検出できる窓領域検出装置およびその検出結果を電波伝搬推定におけるシミュレーションに利用する三次元地図作成装置を提供する。
【解決手段】第1窓領域候補検出部47は、ビルの低中層階では窓領域に隣接ビルなどの写り込みが生じることから撮影角度によって見え方が異なることに着目し、撮影角度の異なる3つの全方位画像IC,IR,ILを、それぞれの注目ビルの画像が重なるように位置合わせして各画素の対応関係を求め、対応する画像領域同士を比較して画素値の差異が大きい矩形領域を第1窓領域候補Rw1として検出する。
(もっと読む)
車線推定装置
【課題】二重白線等、走行車線の内外に、走行車線と誤認し易い車線候補点が断続的にプロットされた場合であっても、走行車線を連続して推定することができて、安定した運転支援を行うことができるようにする。
【解決手段】前回求めた走行車線の内側エッジを推定する仮想線に基づいて今回の予測標準線LpL,LpRを求め(S12)、この予測標準線LpL,LpRと車線境界をプロットする第1候補点P1の点列との一致度を求め(S13)、第1候補点P1が最も一致度が高いと判定した場合、この第1候補点P1の点列を今回の主候補点Pmの点列として設定する(S18)。そして、この主候補点Pmの点列に基づき曲線近似式(y=ax2+bx+c)から、今回の走行車線の内側エッジを推定する仮想線Lsを求める。
(もっと読む)
人物検出装置、人物検出方法及びプログラム
【課題】人物検出装置、人物検出方法及びプログラムにおいて、人物の移動時及び静止時にかかわらず脚の特徴を抽出して人物を正確、且つ、比較的簡単に検出することを目的とする。
【解決手段】重力方向と略垂直な平面で走査範囲を走査して基準位置から走査範囲内の対象物までの距離を測定してレンジデータを出力する走査部と、レンジデータを所定周期でサンプリングしてセグメントを形成し、セグメントに基づいて脚の特徴を抽出する抽出部と、抽出した特徴の運動特性及び幾何情報に基づいて人物を検出する検出部を備え、抽出部は、最短距離近傍法を用いて取得した2つのセグメントペアの移動特性に基づいて、各セグメントペアが静止している静止セグメントを分類する静止特徴強分類器と、各セグメントペアが移動している移動セグメントを分類する移動特徴強分類器を含み、分類されたセグメントの特徴に基づいて2つのセグメントペアから脚ペアを抽出するように構成する。
(もっと読む)
画像処理装置及びそれを用いた撮像装置
【課題】特別な設備を必要とせず、簡易且つ精度良くキャリブレーションができる画像処理装置及びそれを用いた撮像装置を提供する。
【解決手段】少なくとも2台のカメラ4a,4bを具備し、各カメラから得られる画像の領域の対応関係を求める対応領域算出部23と、各カメラから得られる画像の対応領域から得られる情報の一致度を求める一致度算出部24と、一致度算出部が算出した一致度をもとにカメラパラメータを求めるカメラパメータ算出部25を具備する。
(もっと読む)
画像処理装置、画像処理方法、プログラム及び記録媒体
【課題】異なる条件から目的の視点の映像を合成した中間的な合成視点映像を画素単位で精度よく適切に選択することで合成品質を向上させる。
【解決手段】映像処理装置は、複数の異なる位置から被写体を撮影して、任意の視点の映像を生成する。仮想視点生成部5,6は、求める仮想視点の映像を生成するために選択された複数のカメラ映像を用いて中間的な合成画像を生成する。定常性特量算出部は、中間的な合成画像から局所的な定常性を示す特徴量を算出する。合成比率算出部13は、算出した特徴量に基づいて中間的な合成画像を適切に選択、あるいはブレンドするための合成比率を算出する。特徴量は、局所領域におけるエッジ量のエントロピー(平均情報量)とし、その値が小さい(より定常的である)方の中間的な合成画像を選択するか、あるいは重みを高くする。
(もっと読む)
操作判定装置、指先検出装置、操作判定方法、指先検出方法、操作判定プログラム、及び、指先検出プログラム
【課題】ユーザにとって容易なジェスチャにより、クリック操作が行なわれたと判定する操作判定装置を提供する。
【解決手段】指先50が大体静止した状態になった場合に、最新の指先50を中心とした矩形範囲52を設定する(S2000)。最新の指先50から一定距離内に過去所定数分の指先50が存在する場合に、指先50が大体静止した状態であると判断される。矩形範囲52の設定から一定時間TC以内に、矩形範囲52から指先50が消失し、矩形範囲52に指先50が存在しない状態になり(S2002)、そして、再び、矩形範囲52に指先50が出現し、矩形範囲52に指先50が存在する状態になった時に(S2004)、シングルクリックが行なわれたとみなす。
(もっと読む)
道路使用弱者保護システム
【課題】車両と道路使用弱者との衝突を回避する道路使用弱者保護システムを提供する。
【解決手段】視覚的場面の距離マップがステレオビジョンおよび協働する画像処理システムにより生成され、関心領域外および衝突が不可能の対象物がフィルターにより取り除かれ、また道路表面も取り除かれる。距離ビンにクラスター分けされた対象物がセグメンテーションにより分離される。主要コンポーネント解析によってコンポジット距離マップが生成され、連結コンポーネント篩い分けフィルタにより処理される。対象物は一つ又は複数のハーモニックプロファイルおよびほかの特性を用いて、インクルーシブ、エクスクルーシブ及びハーモニックネットワークの組み合わせで種類分けの基準を生成し、認識プロセッサを用いて判別される。
(もっと読む)
三次元位置計測装置、三次元位置計測方法、及びコンピュータプログラム
【課題】空間符号化法における物体の三次元形状の計測を高速に且つ高精度に行う。
【解決手段】それぞれのエッジの位置が相互に重ならない複数の周波数のスリット光パターンを被写体に投影したときのそれぞれの撮像画像から、スリット光パターンのエッジの部分を特定する。そして、2以上のスリット光パターンの撮像画像において、エッジの部分が重なる場合に、そのエッジに対応する位置の距離算出値の信頼度を低下させる。
(もっと読む)
ワーク姿勢検出装置、ワーク処理実行装置及びワーク姿勢検出方法
【課題】高精度なワークの位置決めを必要とせず、大まかに位置決めされたワークの位置・姿勢を精度良く検出することが可能なワーク姿勢検出装置、ワーク処理実行装置及びワーク姿勢検出方法を提供すること。
【解決手段】第1のビジョンカメラ7が作業姿勢のキャブ2の第1基準孔17を二次元検出位置から撮像し、撮像された画像を解析して第1基準孔17の位置を求めることによって、基準位置に対する作業姿勢のキャブ2の概略変位が暫定的に演算される。概略変位が演算されたとき、塗装ガン4c及びシーリングガン5c,6cが制御されて、第1の補正位置及び第2の補正位置に塗装ガン4c及びシーリングガン5c,6cが設定され、第1のビジョンカメラ7の第1の画角よりも狭い第2〜第4の画角に設定された第2〜第4のビジョンカメラ8,9,10が、作業姿勢のキャブ2の第1〜第3基準孔17,18,19を撮像する。
(もっと読む)
点群位置データ処理装置、点群位置データ処理方法、点群位置データ処理システム、および点群位置データ処理プログラム
【課題】異なる視点から得た三次元点群位置データを扱うための処理を効率化する技術を提供する。
【解決手段】測定対象物の三次元点群位置データを取得する点群位置データ取得部111、三次元点群位置データに基づいて非面領域を算出する非面領域算出部を備えた点群位置データ処理部113、第1の視点において点群位置データ取得部111が得た三次元点群位置データの内の前記非面領域に含まれる三次元点群位置データに基づき、第1の視点から見た測定対象物と第1の視点とは異なる第2の視点から見た測定対象物とにおいてオーバーラップさせる部分を算出するオーバーラップ部分算出部114を備え、2つの視点から得た三次元点群位置データ間の位置合わせに適した特徴部分を含むオーバーラップ部分を算出する。
(もっと読む)
測位処理装置、測位処理方法、画像処理装置および画像処理方法
【課題】互いに異なる視点から撮影された複数の撮影画像に基づいて測位対象の位置を測定する場合に、カメラ内部パラメータを用いなくても、簡易にかつ高精度に測位対象の位置を測定する。
【解決手段】互いに異なる視点から撮影された複数の入力画像に基づいて、測位対象の3次元位置を測定する測位処理装置100であって、各入力画像に対応する光学系に入射する光線の進行方向を示す光線ベクトルを各入力画像内の各画素に対応付けた光線情報を保存している光線情報保存部102と、光線情報保存部102に保存されている光線情報を用いて、測位対象の3次元位置を測定する測位部110とを備える。
(もっと読む)
画像処理装置、方法およびプログラム
【課題】心臓を撮影して得られた3次元画像データから心筋梗塞の疑いがある部分をより正確に特定する。
【解決手段】心臓を拡縮状態が異なる2つの時相で撮影して得られた3次元画像V1、V2を記憶し、3次元画像V1において心臓の心筋を表す心筋領域を特定し、特定された心筋領域の各画素について、その画素の3次元画像V1上の位置、および、その画素に解剖学的に対応する3次元画像V2上の点の位置をそれぞれ取得し、取得された3次元画像V1、V2上の位置を用いて、各画素により表される心筋部分の2つの時相間での移動を表す移動ベクトルを取得し、各画素にその画素により表される心筋部分の移動ベクトルを与えてなるベクトル場を各画素において空間的に微分した微分値を取得し、出力する。
(もっと読む)
三次元撮像のためのデータ取得方法
【課題】計測された三次元オブジェクト・シーンの迅速な自動化されたオブジェクト分類化を可能にする方法。
【解決手段】データ取得中または取得したデータを使用しての計測手順中など、三次元計測手順中においてこの方法を実施することができる。種々の実施例において、オブジェクト・シーンが光ビームで照らされ、画像が取得される。実施例によっては、オブジェクト・シーンが構成された光ビームで照らされ、異なる空間位相のパターンによって照らされたオブジェクト・シーンの画像のシーケンスが取得される。一つまたは複数の画像における複数の点の座標が求められ、前記点のそれぞれについて半透明度の値が求められる。前記点の半透明度の値に基づいて各点のオブジェクト・クラスが決められる。オプションとして、オブジェクト・クラスの決定を補助するため、各点についてグレイスケールまたカラー画像データのような追加の情報を使用することができる。
(もっと読む)
車線推定装置
【課題】撮像手段で撮像した画像から、左右の走行車線の位置を推定する。
【解決手段】固定データメモリ9dには走行車線21L,21R間の標準レーン幅W1、二重白線の内側誘導線22間の狭レーン幅W2のデータが記憶されている。車線候補点設定部9aは撮像手段1で撮像した画像に基づいて走行レーンの左右の車線検出点Pを検出し、この車線検出点Pを起点として対向する車線側の各レーン幅W1,W2の位置と両レーン幅W1,W2間の位置に車線候補点G1〜G3を設定する。曲線近似処理部9bは車線検出点Pと車線候補点G1〜G3とに基づき求めた曲線近似式から走行レーンの左右に仮想線Lsを設定する。車線位置設定部9cは左右の仮想線Lsに対する各車線候補点G1〜G3の分散を求め、最小の分散を示す仮想線Lsに対応する車線種により左右の少なくとも一方の仮想線Lsの車線種を推定し、この車線種を基準に走行車線位置を確定する。
(もっと読む)
校正装置、距離計測システム、校正方法および校正プログラム
【課題】 ステレオカメラの経時的な位置ずれを補正し校正できる装置や方法を提供する。
【解決手段】 この校正装置は、移動体に搭載され、カメラ位置に関するパラメータを校正する装置であり、2地点において一方のカメラで撮影した2つの基準画像と、他方のカメラで撮影した2つの対応画像と2つの基準画像とを用い、各地点につき基準画像と対応画像の中の共通する複数の特徴点の位置から算出された複数の視差データとの入力を受け付ける画像取得部300と、2つの基準画像の中の共通する複数の特徴点を探索する特徴点探索部310と、探索された各特徴点につき、2つの基準画像の各特徴点における視差データから、視差とその視差に対応する視差変化量とをそれぞれ算出する視差計算部320と、算出された複数の視差および視差変化量から、カメラ位置に関するパラメータの補正値を算出する補正値計算部330とを含む。
(もっと読む)
点群位置データ処理装置、点群位置データ処理方法、点群位置データ処理システム、および点群位置データ処理プログラム
【課題】異なる視点から得た三次元点群位置データを扱うための処理を効率化する技術を提供する。
【解決手段】第1の視点から得た測定対象物の三次元点群位置データに基づき三次元モデルを形成し、この三次元モデル上において、第2の視点から見た測定対象物の撮影画像との共通部分を指定する。次いで、上記共通部分において、対応点となる特徴点を算出し、対応点を指定する。そして、この指定された対応点に基づいて、第1の視点から得た三次元点群位置データを扱うための座標系に関連付けた第2の視点の三次元位置を算出する。
(もっと読む)
距離画像カメラを用いた人体識別方法および人体識別装置
【課題】共連れを極力的確に検知できる距離画像カメラを用いた人体識別方法および人体識別装置を提供する。
【解決手段】
距離画像カメラで監視対象領域の距離画像を取得する撮像工程と、取得された距離画像から算出した各部の法線ベクトルの角度を画素値とする法線ベクトル画像を算出する法線ベクトル画像算出工程と、人体の少なくとも頭部が含まれるように撮像した距離画像から法線ベクトル画像をテンプレートとして準備するテンプレート準備工程と、画素値である距離情報に基づいて、各テンプレートのサイズを変倍するテンプレート変倍工程と、その各テンプレートと前記監視対象領域法線ベクトル画像との適合度が所定閾値以下であるか否かに基づいて、人体に対応する1つ以上の領域を推定する人体対応領域推定工程と、この人体対応領域推定工程で人体に対応すると推定された各領域の論理和に基づいて人体の数を判定する人数判定工程とを含む。
(もっと読む)
プログラム、情報記憶媒体及び画像生成システム
【課題】拡張現実におけるリアリティ度を向上できるプログラム、情報記憶媒体、画像生成システム等の提供。
【解決手段】画像生成システムは、撮像部により撮影された撮影画像を取得する撮影画像取得部と、撮影画像に映る被写体の奥行き情報を取得する奥行き情報取得部と、取得された奥行き情報に基づいて、被写体とバーチャルオブジェクトとの奥行き方向での前後関係を判断して、撮影画像にバーチャルオブジェクトを合成するための処理を行うオブジェクト処理部と、撮影画像にバーチャルオブジェクトが合成された画像を生成する画像生成部を含む。
(もっと読む)
201 - 220 / 1,504
[ Back to top ]