
Fターム[5B057DB03]の内容
画像処理 (340,757) | 分析部 分析画像の特性 (30,351) | 三次元 (1,504)
Fターム[5B057DB03]に分類される特許
61 - 80 / 1,504
画像処理装置および方法、プログラム
【課題】 撮像画像データ中に鏡面反射光の成分が含まれている場合であっても、被写体までの距離を高精度に推定することを目的とする。
【解決手段】 偏光面が角度が異なる偏光フィルタが装着された複数のカメラにより撮像された複数の偏光画像データに基づき、被写体の鏡面反射光の強度と偏光面の角度との少なくとも何れか一方を推定し、その結果に基づいて被写体までの距離を推定する。
(もっと読む)
画像処理装置、そのプログラムおよび画像処理方法

【課題】最近傍探索を高速化できる技術を提供する。
【解決手段】画像処理装置が、対象物の第1モデル点群データと第1測定点群データとを取得する取得部と、第2モデル点群データと第2測定点群データを取得するソート部と、基準点群データに係る第1点群での基準点に対する最近傍点を参照点群データに係る第2点群から探索する探索部と、基準点設定部とを備え、探索部が、基準点に対する基準座標軸方向の距離が基準距離よりも短い注目点を第2点群から選択する選択部と、基準距離よりも短い基準点と注目点との点間距離により基準距離を更新する更新部と、注目点として新たに選択可能な点が無くなるまで更新された基準距離が反映されつつ選択処理と更新処理とが逐次実行されるように、選択部と更新部とを制御する探索制御部と、選択処理と更新処理との逐次実行処理が終了されたときの基準距離の設定に係る注目点を最近傍点として決定する決定部とを備える。
(もっと読む)
医用画像作成表示装置およびプログラム
【課題】S-CPRを用いて血管等の管腔状組織の断面を表示させて読影を行うような場合に、実際よりも括れて表示されたり、途切れたように表示された場合においても、S-CPR画像を作成する際に管腔状組織の中心を通らない曲線を直線化したことによりそのような表示がなされているのか否かを容易に判別する。
【解決手段】外部操作装置2から、読影用画像表示の要求があったか否かの判断を行い(S11)、要求があった場合には、画像データ記憶部12に記憶された3次元医用画像データからS-CPR画像を作成し(S12)、作成画像記憶部13に格納する(S13)。次に3次元医用画像データからVR画像を作成し(S14)、作成画像記憶部13に格納する(S15)。作成画像記憶部13に格納されたS-CPR画像とVR画像は、画像表示部14の表示画面上に上下に並列されるように表示される(S16)。
(もっと読む)
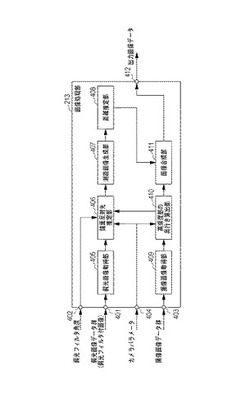
撮像装置
【課題】 複数の主撮像光学系を備えず、従来の撮像操作と同じ操作によって立体画像の撮像をする撮像装置に関する。
【解決手段】 複数の測距レンズに対向して配置された副撮像素子を有してなる測距光学系、各副撮像素子の受光面に結像された被写体像に基づく画像データを用いて被写体までの距離を算出する被写体距離算出手段、被写体までの距離から2次元の距離マップ画像を生成する距離マップ画像生成手段、主画像と距離マップ画像の各画像特徴量とを算出する画像特徴量算出手段、各画像特徴量を用いて主画像と距離マップ画像をマッピングしたデータを生成するマッピングデータ生成手段、マッピングデータと距離マップ画像を用いて2次元奥行き情報画像を生成する2次元奥行き情報画像生成手段、2次元奥行き情報画像から3次元視差画像を生成する立体画像生成手段、を有してなる撮像装置による。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】簡便かつ高速に断面画像の評価を行うことが可能な画像処理装置を提供する。
【解決手段】生体の断面を示す画像である1以上の断面画像が格納される断面画像格納部11と、断面画像について、複数の不連続な領域を有する関心領域を1以上設定する関心領域設定部13と、各関心領域ごとに、各関心領域を評価するための値である評価値を取得する評価値取得部16と、評価値取得部16が取得した評価値を出力する評価値出力部17とを備えた。
(もっと読む)
情報処理装置及び情報処理方法
【課題】計測装置と計測対象物体との間の位置または/及び姿勢の関係があいまい性を含んだ場合であっても、高精度に物体の位置姿勢を計測できるようにする。
【解決手段】撮像時刻におけるロボットのモーション情報から、撮像装置と対象物体の位置姿勢移動量に変換して計測データとして位置姿勢更新に用いる。ロボットのモーション差分という確度の高い情報を計測データとして加えることにより、精度および安定性を向上させるようにする。また、撮像時刻の異なる距離画像と濃淡画像の幾何的関係を、ロボットアームの軌跡情報を用いて求めることで、両者の情報を同時に利用して位置姿勢推定を行うようにすることにより、全体のデータを同時に用いることを可能にする。
(もっと読む)
画像処理装置、画像処理方法及び撮像装置
【課題】ずれ量算出にかかる処理時間を短縮することのできる画像処理装置を提供する。
【解決手段】異なる位置から撮影され、複数の画素が2次元の行列状に配列された右眼画像PR及び左眼画像PLが格納されるメモリ51と、N行目の各画素に対応する切り出しブロックBRを右眼画像PRから切り出し、左眼画像PLの処理領域の全水平領域から比較ブロックBLを行方向に1画素ずつ移動させて切り出すメモリ制御部53を有する。また、切り出された各比較ブロックBLと切り出しブロックBRとを比較して輝度信号の差分絶対値和を算出するSAD演算部54と、各切り出しブロックBR毎に差分絶対値和の最小値に基づいてずれ量を算出する比較器55を有する。さらに、N+1行目の画素に対するずれ量算出処理の際に、N行目において算出された差分絶対値和に基づいて比較ブロックBLの処理領域内での移動範囲を絞るように設定する演算制御部56を有する。
(もっと読む)
キャリブレーション装置及び歪み誤差算出方法
【課題】撮影画像内の周辺部において生じる歪み誤差を補正できる、キャリブレーション装置及びキャリブレーション方法を提供すること。
【解決手段】キャリブレーション装置100において、特徴点設定部110が、周期性を持って全体に配列された特徴点群が含まれたキャリブレーションボードがステレオカメラによって撮影されたボード画像内の画像内特徴点群の内から、設定ポイントが密に且つボード画像の中央部領域にのみ配置された第1パターン及び設定ポイントが疎に且つボード画像の全体に配置された第2パターンに基づいて、第1の画像内特徴点群セット及び第2の画像内特徴点群セットを設定する。誤差補正情報生成部130が、第1の画像内特徴点群セットに含まれた各画像内特徴点の座標と、第2の画像内特徴点群セットに含まれた各画像内特徴点の座標と、キャリブレーションパラメータとに基づいて、歪み誤差を算出する。
(もっと読む)
信号処理装置、撮像装置、信号処理方法およびプログラム
【課題】ぼけの偏差を補正して距離情報を算出する。
【解決手段】信号処理装置は、例えば、撮像部が所定の被写体を撮像することにより得られるとともに互いにぼけの状態の異なる、第1の画像データおよび第2の画像データが入力される入力部と、第1の画像データおよび第2の画像データに基づき、被写体の奥行き方向の位置に応じた第1の距離情報を算出する距離情報算出部と、被写体の結像面と、撮像部の撮像面との不一致によって生じるぼけの偏差を補正する処理を、第1の距離情報に対して行うことで、第2の距離情報を算出する距離情報補正部とを備える。
(もっと読む)
環境認識装置及びプログラム
【課題】環境認識の精度を向上させることができる環境認識装置及びプログラムを提供すること。
【解決手段】被写体を撮像することにより得られた画像を、明度情報に基づき同一の物体である可能性が高い領域に分割し、同一の分割領域に存在する複数の特徴点となる画素の距離情報に基づいて、特徴点以外の画素の距離情報を補完して距離画像を生成し、注目画素の距離情報に基づいて特徴量を抽出するためのウインドウのサイズを変更し、該ウインドウ内の画素から注目画素の特徴量を抽出し、抽出した特徴量と予め求めておいた対象物毎の特徴量とを比較することにより画素毎に物体を識別し、分割領域内の画素の識別結果を統合して、分割領域毎に対象物を識別して環境認識を行う。
(もっと読む)
画像処理装置および画像処理方法、プログラム
【課題】 形状推定を行った後に、推定した形状情報を用いて質感推定を行うと、形状推定の誤差が大きい場所で質感推定が不正確となる。
【解決手段】 多視点画像データから被写体の形状を推定し、推定された形状の確からしさを示す信頼度を算出し、推定された形状と信頼度と多視点画像データとから、少なくとも二つの方向から観察した際の被写体の反射率を示す質感情報を推定する画像処理装置。
(もっと読む)
3次元計測方法
【課題】ワークの3次元計測を行うために、3次元上の直線の式を算出する直線部を選択する場合に、多くの直線部を選択可能にする3次元計測方法を提供する。
【解決手段】ワークの3次元計測を行うにあたり、まず、ワークの設計データを取得する(S1)。次に、第1カメラ及び第2カメラよって、ワークを撮像し、第1画像及び第2画像を取得する(S2)。そして、取得した画像データから第1及び第2直線部を選択する(S4)。これら第1及び第2直線部を選択すると、ステレオ法を用いて第1直線部の3次元上の直線の式を算出する。次に、第1直線部の3次元上の直線の式と、ワークの設計データから求められる第1直線部に対する幾何学的な拘束条件とを用いて第2直線部の3次元上の直線の式を算出する。そして、これら第1及び第2直線部の3次元上の直線の式を用いてワークの3次元位置又は姿勢を計測する。
(もっと読む)
画像処理システム、装置、方法及びプログラム
【課題】立体感が最適となる立体視用の画像を表示すること。
【解決手段】実施形態の画像処理システムは、端末装置140の表示部142及び制御部145を備える。表示部142は、所定の視差数の視差画像を表示することで、観察者により立体的に認識される立体画像を表示する。制御部145は、所定の視差数の視差画像を3次元の医用画像データであるボリュームデータから生成する際に、被写体部分の形状に基づいて視差画像間の視差角を変更し、変更後の視差角となる所定の視差数の視差画像を表示部142に表示するように制御する。
(もっと読む)
車両用画像生成装置及び車両用画像生成方法
【課題】車両周囲画像に含まれる他車両の任意視点から見た画像を、より正確に生成する装置を提供する。
【解決手段】車両用画像生成装置を、3次元構造を有する車両周囲画像に含まれる他車両の可視画像部分の画像情報に基づき、他車両の死角部位の形状や色などの情報を推測する死角情報推測部25と、死角情報推測部25で推測された死角情報に基づき、可視画像部分データから死角部位を補完するための補完画像データを生成し、生成した補完画像データを用いて他車両の死角部位の画像を補完する画像補完部26と、仮想視点設定部27から入力される仮想視点情報に基づき、補完後の車両周囲画像を仮想視点情報の示す視点から見た画像に再構成する画像再構成部28と、を含む構成とした。
(もっと読む)
情報処理装置、情報処理方法、およびプログラム
【課題】コントラストが低い画像および自己相関が高い画像が対象であっても、高速かつ高精度の対応点の探索が実現され得る技術を提供する。
【解決手段】画像取得部によって第1画像および第2画像が取得され、第1設定部によって第1画像に基準点が設定され、第2設定部によって第2画像に探索基準点が設定される。次に、検出部によって、第1画像において基準点を基準として設けられる基準領域と、第2画像において探索基準点を基準として設けられる参照領域とに係る相関演算の結果に基づき、第2画像において基準点に対応する対応点が検出される。そして、判定部によって、第2画像における探索基準点と対応点との位置関係に基づいて、対応点の信頼度が判定される。
(もっと読む)
通行監視装置
【課題】監視領域に存在する人体のような物体の数を、髪型や複数の頭部の接近状態の影響を受けることなく物体の形状を考慮して正確に判別できる通行監視装置を提供する。
【解決手段】監視領域に存在する物体Hに関する検知ブロックによる3次元の物体情報から得られたブロック投影画像に対し、頭部α、髪型バッファ部βおよび肩部γを含むブロック領域をテンプレート画像とした物体の形状のテンプレートブロック20によるテンプレートマッチングを行って、物体Hの数を判別する。
(もっと読む)
画像処理装置、そのプログラム、および画像処理方法
【課題】多重解像度戦略を用いた対応点探索処理において信頼度が局所的に悪化した場合における総合信頼度を改善する。
【解決手段】画像処理装置は、複数の階層にわって複数の解像度で階層的に表現された複数の基準画像と複数の参照画像とを取得する取得部と、注目点を複数の基準画像にそれぞれ設定する設定部と、注目基準画像の注目点に対応した注目参照画像の対応点を探索する対応点探索処理を各階層において逐次行なう探索部と、各階層における対応点探索処理の結果に関する各信頼度を決定する決定部と、各信頼度の全体的な状況を表現した基準値を、互いに隣接した各階層組みのそれぞれの間にわたる各信頼度についての各信頼度変化のうち一部の信頼度変化を他の信頼度変化よりも強調した補正値を用いて補正することにより、各信頼度を総合した総合信頼度を算出する演算部とを備える。
(もっと読む)
画像処理システム及び方法
【課題】医用画像を適切に表示することができる画像処理システム及び方法を提供すること。
【解決手段】実施形態に係る画像処理システムは、第1画像生成部と、第2画像生成部と、表示制御部とを備える。前記第1画像生成部は、3次元の医用画像データであるボリュームデータに対してレンダリング処理を行うことで、第1画像を生成する。前記第2画像生成部は、前記ボリュームデータに対してレンダリング処理を行うことで、前記第1画像と立体感の異なる第2画像を生成する。前記表示制御部は、表示部の表示面内で指定された指定領域及び該指定領域を除く背景領域のそれぞれに、前記第1画像及び前記第2画像のそれぞれを表示するように制御する。
(もっと読む)
医用画像処理装置、及び医用画像処理プログラム
【課題】狭窄の診断に供する情報を生成することが可能な医用画像処理装置を提供する。
【解決手段】抽出部3は、複数のボリュームデータのそれぞれから、心臓の形態を表す第1データを抽出し、さらに、造影剤が流入した冠動脈の形態を表す第2データを抽出する。抽出部3は、第2データを利用して複数のボリュームデータのそれぞれから、冠動脈の形態を表す第3データを抽出する。解析部4は、複数の第3データのそれぞれにおける冠動脈の画素値に基づいて、冠動脈の各領域における血流速度を求める。カラーマッピング部5は、血流速度の大きさに応じた色を、冠動脈の各領域に割り当てることで色ボリュームデータを生成する。合成部6はボリュームデータと色ボリュームデータとを合成し、表示画像生成部7は合成したボリュームデータに基づいて表示用の画像データを生成する。
(もっと読む)
ロボット制御システム、ロボットシステム及びマーカー処理方法
【課題】 ロボットの操作対象物に設定された第1のマーカーに基づいて、操作対象物の位置情報を特定できるロボット制御システム等の提供。
【解決手段】 ロボット制御システム10は、撮像部20から得られる画像情報に基づいて画像処理を行う処理部110と、処理部110の処理結果に基づいてロボット30の制御を行う制御部120と、を含む。処理部110は、ロボット30の操作対象物に設定された第1のマーカーに設定された画像構成要素が、N回対称性を有する場合に、画像情報に基づいて、第1のマーカーの認識処理を行い、操作対象物のN個の候補位置情報を求め、操作対象物の認識処理の結果に基づいて、N個の候補位置情報の中から操作対象物の位置情報を特定する。制御部120は、操作対象物の位置情報に応じてロボット30を制御する。
(もっと読む)
61 - 80 / 1,504
[ Back to top ]