
Fターム[5B057DB03]の内容
画像処理 (340,757) | 分析部 分析画像の特性 (30,351) | 三次元 (1,504)
Fターム[5B057DB03]に分類される特許
121 - 140 / 1,504
撮像装置
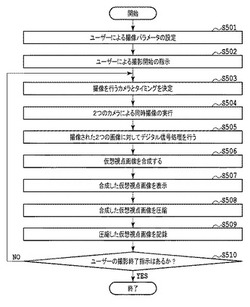
【課題】複数のカメラから仮想視点画像を生成する動画撮影系においてタイミングずらしの撮像を行うことでフレームレート性能を向上させる場合に画像間の対応点探索の誤りや動被写体の存在により推定精度が低下する。
【解決手段】複数の撮像部のうちの2つ以上が同時撮像を行うように撮像タイミングを制御し、複数の同時撮像された画像から撮像装置全体の動きを推定する。複数の撮像部によって同時撮像された画像と推定された動きとから仮想視点画像を合成する。
(もっと読む)
情報処理プログラム、情報処理装置、情報処理システム、および、情報処理方法

【課題】簡単な操作で種々の画像を表示することが可能な情報処理技術を提供する。
【解決手段】ゲーム装置は、実空間に配置されたマーカを撮像する。ゲーム装置は、撮像した画像に含まれるマーカに基づいて、ゲーム装置を基準としたマーカの位置および姿勢を算出するとともに、マーカ上にマーカ座標系を設定する。また、ゲーム装置は、ゲーム装置が備える加速度センサが検出した加速度に基づいて、重力方向を検出する。次に、ゲーム装置は、検出した重力方向に基づいて、マーカ座標系の重力方向を算出し、算出したマーカ座標系の重力方向に基づいて、仮想キャラクタの姿勢を決定する。そして、ゲーム装置は、当該仮想キャラクタを表示装置に表示する。
(もっと読む)
車両用画像処理装置
【課題】画像のダイナミックレンジが大きく、白線等の道路設置物や灯火を確実に検出可能な車両用画像処理装置を提供すること。
【解決手段】第1の撮像手段3と、第2の撮像手段5と、前記第1の撮像手段3及び前記第2の撮像手段5の露出制御を、道路設置物・灯火認識用露出制御と、立体物認識用露出制御との間で切り替える切り替え手段7と、前記第1の撮像手段3及び前記第2の撮像手段5により撮像された画像から前記道路設置物、灯火又は前記立体物を検出する検出手段7と、を備え、前記道路設置物・灯火認識用露出制御において、前記第1の撮像手段3の露出と、前記第2の撮像手段5の露出とが異なることを特徴とする車両用画像処理装置1。
(もっと読む)
姿勢認識装置、姿勢認識方法、プログラム及び記録媒体
【課題】載置面上に自由に置かれた物体を高速に認識する。
【解決手段】安定姿勢計算部6は、3次元モデル情報記憶部5から3次元モデルの情報を読み出して、物体が載置面上で静止すると予測される物体の姿勢に対応する3次元モデルの安定姿勢を計算する。2次元投影画像生成部7は、安定姿勢計算部6で計算された安定姿勢の3次元モデルを観測して得られる2次元投影画像を生成する。2次元投影画像記憶部8は、2次元投影画像生成部7により生成された2次元投影画像を記憶する。載置面上に載置された物体の姿勢を認識する際には、画像照合部9は、撮像部101により撮像されて得られた撮像画像と、2次元投影画像記憶部8に記憶された2次元投影画像との一致度を計算する画像照合を行う。姿勢認識部10は、一致度が最も高い2次元投影画像に対応する3次元モデルの姿勢を、物体の姿勢として認識する。
(もっと読む)
画像処理システム、装置、方法及びプログラム
【課題】3次元の医用画像データから立体視用の画像を生成するために要する処理の負荷を軽減すること。
【解決手段】実施形態の画像処理システムは、ワークステーション130のレンダリング処理部136及び制御部135を備える。レンダリング処理部136は、3次元の医用画像データであるボリュームデータに対してレンダリング処理を行なう。制御部135は、端末装置140が有する立体表示モニタにて立体視するために必要となる視差数以上の視差画像群をボリュームデータから生成させるようにレンダリング処理部136を制御し、レンダリング処理部136が生成した視差画像群を画像保管装置120に格納するように制御する。端末装置140が有する立体表示モニタは、画像保管装置120に格納された視差画像群の中から視差数の視差画像を選択して構成される立体視画像を表示する。
(もっと読む)
フィルタリング処理回路とそれを有するマッチング回路
【課題】簡単な回路構成で高速にフィルタリング処理を行う。
【解決手段】異なる視点での2つの画像に対する複数のずれ量に対応する差分絶対値和のうち,最小差分絶対値和を抽出するフィルタリング処理回路であって,入力回路に入力される複数のずれ量にそれぞれ対応する複数の差分絶対値和が当該入力時点までで最小の差分絶対値和の場合に最小の差分絶対値和として保持する最小差分絶対値和保持回路と,次に小さい第2最小差分絶対値和を検出して保持する第2最小差分絶対値和検出回路と,入力時点までで最小の差分絶対値和でない場合には,当該入力差分絶対値和を第2最小差分絶対値和検出回路に入力し,最小の差分絶対値和である場合には,最小差分絶対値和保持回路で最小差分絶対値が更新されることに伴って最小差分絶対値和保持回路から出力される元の最小差分絶対値和を,第2最小差分絶対値和検出回路に入力するセレクタ回路とを有する。
(もっと読む)
三次元モデリング装置、三次元モデリング方法、ならびに、プログラム
【課題】精度良く三次元モデルを作成する。
【解決手段】画像受付部11は、被写体を異なる角度から複数回撮像することにより得られる複数の画像の組の入力を受け付ける。三次元モデル生成部12は、受け付けられた複数の画像の組のそれぞれに基づいて、被写体の三次元モデルを複数生成する。三次元モデル選択部13は、被合成三次元モデルと合成三次元モデルとを選択する。特徴点抽出部14は、被合成三次元モデルと合成三次元モデルから、複数の第1特徴点と第2特徴点を抽出する。特徴点選択部15は、抽出された複数の第1特徴点と第2特徴点の中から、ステレオカメラ1との距離が近い特徴点を優先的に選択する。座標変換パラメータ取得部16は、座標変換パラメータを取得する。座標変換部17は、合成三次元モデルの座標を被合成三次元モデルの座標系の座標に変換する。三次元モデル合成部18は、合成三次元モデルを被合成三次元モデルに合成する。
(もっと読む)
情報処理システム、情報処理装置、撮像装置、および情報処理方法
【課題】対象物の動画像から応答性よく位置情報を取得する。
【解決手段】撮像装置12は第1カメラ22、第2カメラ24を含む。各カメラはそれぞれ、既知の幅を隔てた左右の位置から同じタイミング、同じフレームレートで対象物を撮影する。そして撮影した各フレーム画像を所定の複数の解像度の画像データに変換する。情報処理装置14の入力情報取得部26は、ユーザからの指示入力を取得する。位置情報生成部28は、ステレオ画像のデータのうち低解像度、広範囲の画像で対象物の領域または動きのある領域を対象領域としておよそ見積もり、当該領域のみ高解像度の画像でステレオマッチングを行い、対象物の3次元の位置を特定する。出力情報生成部32は、対象物の位置に基づき必要な処理を行い出力情報を生成する。通信部30は、撮像装置12に対する画像データの要求および取得を行う。
(もっと読む)
ステレオカメラのキャリブレーション方法及び情報処理装置
【課題】ステレオカメラのキャリブレーション方法及び情報処理装置において、簡単、且つ、短時間の作業で安定した精度の補正パラメータを生成可能とすることを目的とする。
【解決手段】右及び左カメラのキャリブレーションを行う際、点灯状態の右及び左発光部を撮影可能な位置に配置された反射体に対し、点灯された右発光部を右カメラで撮影した画像の位置座標を点灯された左発光部を左カメラで撮影した画像の位置座標に平行移動させる補正パラメータを求め、点灯された右及び左発光部を右カメラで撮影した画像に基づいて右及び左発光部を結ぶ直線の回転角度を求め、右カメラの撮影画像を回転補正する補正パラメータを求め、点灯された右及び左発光部を左カメラで撮影した画像に基づいて右及び左発光部を結ぶ直線の回転角度を求め、左カメラの撮影画像を回転補正する補正パラメータを求めるように構成する。
(もっと読む)
拡張現実感提供装置及び仮想物体の重畳方法
【課題】マーカーを用いることなく、違和感のない拡張現実感を提供することが可能な拡張現実感提供装置を提供する。
【解決手段】地面推定部5は、撮像部1,2で撮像して得られる2つの撮像画像データの各々から顔を検出し、検出した顔の目と口を結ぶ三角形の三次元座標を算出する。地面推定部5は、2つの撮像画像データの一方から前記検出した顔を含む被写体の輪郭を抽出し、この輪郭を前記三角形の三次元座標を用いて三次元空間に逆投影する。地面推定部5は、三次元空間における前記輪郭のデジタルカメラ100の鉛直線の伸びる方向の端部を含みかつ当該方向に垂直な面を地面と推定する。地面推定部5は、表示部11に表示される立体映像において、前記推定した地面上に仮想物体を重畳表示させる。
(もっと読む)
監視装置及びプログラム
【課題】監視領域の撮影画像に基づいて監視を行う際、撮影画像の各画素について正確な三次元空間座標及び空間属性を保持するとともに常に最新の情報に更新することができる監視装置を提供する。
【解決手段】監視領域を連続撮影して得られた撮影画像の各画素に三次元座標により定まる位置を示す三次元空間座標を設定する設定手段(S103)と、撮影画像の各画素に該各画素が属する画像部位に対応する空間属性を付与すると共に、画像部位と隣接する画素の各々に画像部位との境界を示す空間属性を付与する付与手段(S113)と、境界を示す空間属性が付与された画素の各々から特徴量を繰り返し抽出する抽出手段(S117)と、抽出された特徴量の変化量が予め定められた閾値を超えた場合に、設定された三次元座標により定まる位置を示す三次元空間座標になるように前記画素の各々に設定された三次元空間座標を変更する変更手段(S129)と、を備えた。
(もっと読む)
3次元的モデルを利用した身体臓器の映像生成方法及び装置並びにコンピュータ読み取り可能な記録媒体
【課題】リアルタイムで医療映像を入力してこれを3次元モデルと整合した映像と比較し、リアルタイム医療映像に3次元モデルが結合された映像を出力する3次元的モデルを利用した身体臓器の映像生成方法及び装置を提供する。
【解決手段】本発明による臓器映像の生成方法は、患者の少なくとも一つの臓器を表す医療映像に基づいて少なくとも一つの臓器の3次元モデルを生成し、患者の身体活動による少なくとも一つの臓器の形態的変化を表す複数の映像と臓器の3次元モデルとを整合させることで複数の整合映像を生成し、患者の現在身体状態に基づいて複数の整合映像のうちのいずれか一つを選択して出力する。
(もっと読む)
ステレオ画像較正方法、ステレオ画像較正装置及びステレオ画像較正用コンピュータプログラム
【課題】各カメラによる画像に写っている像全体の位置をステレオ画像として適切となるように修正するための較正パラメータを算出するステレオ画像較正方法を提供する。
【解決手段】ステレオ画像較正方法は、第1及び第2のカメラから被写体を含む領域を撮影した第1及び第2の画像を取得し、第1及び第2の画像からそれぞれ被写体領域を検出し、各画像の被写体領域から被写体上の同一の点に対応する被写体特徴点の組を抽出し、被写体特徴点の組に基づいて、像面に対して平行な第1の軸及び第2の軸のそれぞれの周りの第1のカメラの回転角と第2のカメラの回転角の差による各画像上の被写体の位置のずれを補正する第1の較正パラメータを求め、第1の画像及び第2の画像の背景領域に写っている物体の像から各カメラの光軸周りの回転角の差による第1の画像と第2の画像間の回転を補正する第2の較正パラメータを求めることを含む。
(もっと読む)
情報処理装置および情報処理プログラム
【課題】現実の画像に含まれる立体物に合わせたリアリティのある動作をキャラクタにさせることができる情報処理装置を提供する。
【解決手段】情報処理装置1は、フィギュア8を含む現実の画像を撮像するカメラと、フィギュア8と関連付けてキャラクタC1を動作させる動作範囲が設定された空間情報が記憶された記憶部と、この動作範囲内でキャラクタC1を動作させる動作処理部と、空間情報によって規定される仮想空間内における仮想の視点を、カメラの視点に対応させて設定する視点設定部と、この仮想の視点に基づいて、キャラクタC1を仮想の画像に変換する画像変換部と、仮想の画像と、現実の画像とを重ね合わせて表示させるディスプレイ2とを有する。これによれば、現実の画像に含まれるフィギュア8に合わせたリアリティのある動作をキャラクタC1にさせることができる。
(もっと読む)
車外監視装置および車外監視方法
【課題】分割領域内で距離分布のピーク候補となる相対距離が複数ある場合においても、所望する相対距離を特定し、立体物を正しく認識すると共に、処理負荷の軽減を図る。
【解決手段】車外監視装置は、検出領域内に存在する立体物の位置情報を取得し、検出領域を水平方向に対して複数の第1分割領域に分割し(S450)、位置情報に基づいて第1分割領域毎の距離分布のピークに相当する第1代表距離を導出し、第1代表距離に基づき第1分割領域をグループ化して1または複数の第1分割領域群を生成し、第1分割領域群を鉛直方向に対して複数の第2分割領域に分割し(S452)、相対距離が第1代表距離に近接する第2分割領域をグループ化して第2分割領域群を生成し、第2分割領域群が生成された第1分割領域群における、第1代表距離を導出する対象範囲を、第2分割領域群に相当する鉛直範囲に制限する。
(もっと読む)
医用画像処理装置
【課題】ブルズアイマップの診断能の向上。
【解決手段】記憶部11は、心臓の機能指標に関する3次元の機能画像データを記憶する。心筋領域抽出部15は、3次元の機能画像データから心筋領域を抽出する。正規化部17は、心筋領域の内壁と外壁との間の距離を既定の数値範囲で正規化する。ブルズアイマップ生成部21は、既定の数値範囲内の所定値に対応する心筋領域上の位置の画素値の空間分布を、2次元の極座標で表現するブルズアイマップを生成する。表示部23は、ブルズアイマップを表示する。
(もっと読む)
画像出力装置
【課題】 台面上に載置されているものを上方から撮影する場合、同じ被写体であっても周囲の環境によっては写り具合が大きく変化してしまっていた。
【解決手段】 カメラ部が台面上で同台面上の被写体を撮影する。外光検出部は上記台面上での外光の状況を検出し、外光演算部はこの外光検出部による検出結果に基づいて上記カメラ部による上記台面上の撮影結果への影響を軽減する調整値を演算する。すると、外光除去処理部は上記カメラ部に上記台面上の被写体を撮影させて得られた画像に上記調整値を反映させて外光の影響を低減させる処理を施し、この外光除去処理部にて処理された画像を出力する。
(もっと読む)
情報処理方法、眼窩下点の位置推定方法、フランクフルト平面の算出方法および情報処理装置
【課題】被測定者の負担が少なく、かつ簡便な方法によって、眼窩下点などの解剖学的特徴点の位置を推定する方法および装置を提供する。
【解決手段】人(被測定者)の頭部の皮膚表面より、目頭点ENT、目尻点ECT、目頭点ENTの側の眼裂と眉との間の凹部にあたる瞼点PLP、および耳珠上縁点の座標をそれぞれ取得する。取得された目頭点ENT、目尻点ECTおよび瞼点PLPを通る仮想球面SPHの最下点の座標を算出することで眼窩下点ORBの位置を推定する。そして、一または二の眼裂に関する眼窩下点ORBおよび一または二の耳珠上縁点を含む少なくとも3点の座標に基づいてフランクフルト平面を算出する。
(もっと読む)
植生検出装置及び植生検出方法
【課題】座標変換などのシステムの統合を容易にし、またコストや物理的サイズも抑え、夜間など暗い環境にも対応する植生検出装置を提供する。
【解決手段】植物の葉で吸収されにくい波長の第1の3次元レーザレーダ21と、吸収されやすい波長の第2の3次元レーザレーダ22とから出力された計測値(距離、角度、反射率)を取得する第1及び第2の3次元点群取得部11及び12と、第1の3次元レーザレーダ21による第1の計測点と、その第1の計測点に最も近い第2の3次元レーザレーダ22による第2の計測点とを対応づける対応付け部16と、対応づけられた第1及び第2の計測点について、第1の計測点の反射率と第2の計測点の反射率との比を求める反射率比算出部15と、反射率の比に基づいて互いに対応づけられた計測点が植物か否かを判定する判定部17とを備えている。
(もっと読む)
画像処理装置、方法、及びプログラム
【課題】複数の検査画像のうちの1つで観察障害を特定したとき、その観察障害が特定された検査画像とは異なる検査画像において、観察障害が特定された部分に対応する部分を簡易に判別可能とする。
【解決手段】検査画像入力手段11は、医用画像撮影装置を用いて撮影された管腔を有する被検体の内部を示す第1及び第2の検査画像21、22を入力する。観察障害特定手段16は、第1の検査画像中の観察障害を特定する。対応位置決定手段17は、第2の検査画像における、第1の検査画像において特定された観察障害に対応する部分を特定する。仮想内視鏡画像生成手段13は、第1及び第2の検査画像から仮想内視鏡画像を生成する。対応位置明示手段18は、第2の検査画像22から生成された仮想内視鏡画像上に、対応位置決定手段17で特定された観察障害に対応する部分を明示する。
(もっと読む)
121 - 140 / 1,504
[ Back to top ]