
Fターム[5B057DB09]の内容
画像処理 (340,757) | 分析部 分析画像の特性 (30,351) | 多値 (10,652)
Fターム[5B057DB09]に分類される特許
21 - 40 / 10,652
焦点ずれしたピルボックス画像を利用して深度推定を行うためのシステム及び方法
画像処理装置およびその方法
画像処理装置、及びプログラム
【課題】異なる地域における環境光の違いによって生じる色再現の変化に応じて、より高い自由度で撮影画像を補正する。
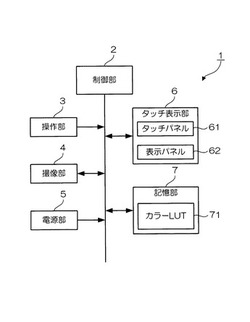
【解決手段】カラーLUT71は、撮影時に撮像部4で取り込まれた画像データのRGB特性を、人間の目の色に対する特性(三刺激値)に合致させるように変換するための変換テーブルである。制御部2は、ユーザによる操作部3、またはタッチパネル61の操作に従って撮影地を設定し、次いで変換先の地域を設定し、設定した撮影地と変化先の地域とから、対応するカラーLUT71の補正パラメータを選択する。レリーズ操作があると、撮像部4による撮影処理を行い、選択したカラーLUT71の補正パラメータに従って撮影した画像のRGB値を変換する画像処理を行う。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム

【課題】視差画像をより高い精度で補正できる画像処理装置、画像処理方法および画像処理プログラムを提供する。
【解決手段】画像処理装置は、被写体を異なる視点で撮像することで取得された少なくとも2つの入力画像から視差画像を生成するための視差画像生成手段と、視差画像生成手段によって生成された視差画像に含まれる画素についての信頼度を算出するための信頼度算出手段と、視差画像生成手段によって生成された視差画像を補正して出力するための視差画像補正手段とを含む。視差画像補正手段は、視差画像生成手段によって生成された視差画像に含まれる被補正画素の周辺にある画素の信頼度および色情報に基づいて、当該被補正画素についての補正画素候補としての適性を算出するための適性算出手段と、算出された適性に基づいて、当該被補正画素の補正に用いる画素を決定するための決定手段とを含む。
(もっと読む)
車両周辺撮影装置および車両周辺画像の処理方法
【課題】高精度に車両周辺の障害物を検出することができる車両周辺撮影技術を提供する。
【解決手段】車両の周辺の情景を撮影する第1カメラと、第1カメラの撮影範囲と部分的に重複する撮影範囲を撮影する第2カメラと、が車両に搭載されている。第1カメラと第2カメラとの一方を主カメラとするとともに他方を副カメラとし、主カメラにより撮影された画像を主撮影画像とするとともに副カメラにより撮影された画像を副撮影画像とする。視点変換部13は、副撮影画像を主カメラの視点位置から撮影された画像に視点変換した視点変換画像を生成する。画像差分部14は、比較情報として主撮影画像と視点変換画像との差分画像を生成する。
(もっと読む)
情報処理装置及び情報処理方法
【課題】高感度画像からノイズ成分をより効率的かつ効果的に除去することが可能な、新規かつ改良された情報処理装置及び情報処理方法を提供する。
【解決手段】上記課題を解決するために、本発明のある観点によれば、フラッシュ発光を伴う撮像により生成された低感度画像と、フラッシュ発光を伴わない撮像により生成された高感度画像と、を取得する撮像画像取得部と、低感度画像の画素値と高感度画像の画素値との差分値である画素差分値を画素毎に示す差分画像を生成する差分画像生成部と、差分画像に基づいて、高感度画像内のノイズ成分を画素毎に示すノイズ画像を生成するノイズ画像生成部と、高感度画像及びノイズ画像に基づいて、高感度画像からノイズ成分を除去するノイズ除去部と、を備えることを特徴とする、情報処理装置が提供される。
(もっと読む)
画像処理方法及び装置
【課題】
シンプルな構成で空間分解能を向上させることができ、低コストで汎用性を備えたイメージング手法を提供する。
【解決手段】
対象の位置を固定して、対象の 画像をベース画像として取得するステップと、対象あるいは/および画像取得装置の測定系を移動させることで、前記ベース画像に対して結像面内で所定量シフトしたN枚のシフト画像(N≧1)を取得するステップと、前記ベース画像と各シフト画像の同じ座標の画素同士の差分からN枚の差分画像(N≧1)を取得するステップと、前記N枚の差分画像を加算して対象の差分積算画像を取得するステップと、からなる。
(もっと読む)
画像処理装置、および画像処理方法、並びにプログラム
【課題】2眼カメラの横持ち撮影、縦持ち撮影いずれの場合にも3D表示可能なステレオ画像を出力可能とした装置、方法を提供する。
【解決手段】異なる視点から撮影された左眼画像と右眼画像を入力画像として入力する画像入力部と、入力画像の撮影時のカメラの角度に応じた制御信号を出力する撮影角度判定部と、制御信号が、2眼カメラの横持ち撮影による横持ち撮影画像であることを示す場合、前記入力画像である左眼画像と右眼画像を出力し、記制御信号が、2眼カメラの縦持ち撮影による縦持ち撮影画像であることを示す場合、左眼画像または右眼画像のいずれか一方の画像をステレオ画像生成処理部に入力し、ステレオ画像生成処理部において1枚の画像に基づく2D3D変換処理によって生成した左眼画像と右眼画像を出力する。
(もっと読む)
インライン画像回転
【課題】画像のインライン回転を遂行する方法及び装置を提供する。
【解決手段】この装置は、実行されるべき指定の回転に基づく順序でソース画像からピクセルを読み取るための回転ユニットを備えている。ソース画像は、複数のタイルへ区画化され、それらのタイルは、回転画像内でどこに位置するかに基づいて処理され、そして各タイルは、タイルバッファに記憶される。タイルバッファ内のターゲットピクセルアドレスが計算されてルックアップテーブルに記憶され、そしてピクセルが回転ユニットによりソース画像から検索されるときに、ルックアップテーブルを読み取って、対応するタイルバッファ内のどこにピクセルを書き込むべきか決定する。
(もっと読む)
画像処理装置、顕微鏡システム、画像処理方法、及び画像処理プログラム
【課題】生体組織標本の切片標本を撮像して得られた一連の標本画像に対し、もとの生体組織標本をスライスした順序に対応した並び順を付与することができる画像処理装置等を提供する。
【解決手段】生体組織標本をスライスし染色を施した複数の切片標本に対応する複数の画像に対し、該画像内の各画素の色特徴量に基づいて少なくとも1種類の組織構成要素を抽出し、該種類ごとの画像である要素画像を作成する要素画像作成部452と、複数の画像間で、同じ種類の要素画像の連続性を評価する連続性評価アルゴリズム453a、453b、…を有し、連続性の評価結果に基づいて、複数の画像の並び順を判定する連続性評価部453とを備える。
(もっと読む)
画像読取装置及び地色補正プログラム
【課題】地色補正により低濃度抜き領域が見難くなることを抑制すること。
【解決手段】画像処理装置は、読取データに基づき、原稿画像に、背景色よりも低い画像濃度で打ち抜かれた領域である低濃度抜き領域が有るかどうかを判断する領域有無判断処理と、低濃度抜き領域が無いと判断した場合、読取データに対し、原稿画像の地色濃度に応じた地色補正を行い、低濃度抜き領域が有ると判断した場合、少なくとも当該低濃度抜き領域及びその背景領域の読取データに対し、地色補正を行わない補正切替処理と、を実行する。
(もっと読む)
画像再生装置、画像再生方法及びデータ構造
【課題】画像の提供者が視聴者に対して3次元上の所望の位置に画像を配置して視聴させることができる。
【解決手段】実施形態の画像再生装置は、表示手段の表示面に対する視聴者の視点位置を取得し、表示する画像と、その画像を視聴者に表示する際の、視聴者に対する画像の3次元上の配置位置を示す配置情報とを含む画像データを取得し、取得された視聴者の視点位置と、取得された配置位置とをもとに、配置位置に取得された画像が表示されるように、取得された画像の画素に対応する表示面上の画素値を算出し、算出された画素値をもとに、取得された画像を表示手段に表示させる。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】被写体領域近傍の背景領域のぼけ滲みの発生を抑えた画像データを得る。
【解決手段】背景ぼかし画像生成部111は、撮像装置100により撮像された画像データにおける被写体を含む領域を判定し、上記画像データにおける対象部分と被写体を含む領域との距離に応じてゲイン値を決定する。そして背景ぼかし画像生成部111は、決定したゲイン値を用いて対象部分を補間した上で画像データに対してフィルタリング処理を施し、フィルタリング処理を施した画像データと、被写体を含む領域に該当する画像データとを合成する。
(もっと読む)
画像処理装置、画像処理方法、及び画像処理プログラム
【課題】管腔内画像において、異常部と血管とを区別し、異常部を適正に検出することができる画像処理装置、画像処理方法、及び画像処理プログラムを提供する。
【解決手段】画像処理装置1は、被検体の管腔内を撮像して得られた管腔内画像から異常部の候補となる領域である異常候補領域を検出する異常候補領域検出部110と、管腔内画像から管状領域を検出する管状領域検出部120と、異常候補領域と管状領域とが、管状領域と類似した色の領域で連結されているか否かを判定する連結性判定部130と、連結性判定部130の判定結果に基づいて、異常候補領域が異常部であるか否かを判定する異常判定部140とを備える。
(もっと読む)
俯瞰映像生成装置、俯瞰映像生成方法、映像表示システムおよびナビゲーション装置
【課題】撮像画像を俯瞰画像に変換する変換パラメータを簡易に調整できる俯瞰映像生成装置、俯瞰映像生成方法、映像表示システムおよびナビゲーション装置を提供する。
【解決手段】俯瞰変換部23が、画像を射影変換により俯瞰画像に変換する俯瞰パラメータを記憶する俯瞰パラメータ記憶部25から読み出した俯瞰パラメータを用いて、カメラ10により撮像された撮像画像を俯瞰画像に変換し、間隔指標算出部24bが、等間隔のパターンの標示が撮像された撮像画像を変換した俯瞰画像上で標示のパターンの間隔が揃う度合を示す間隔指標値を算出し、俯瞰パラメータ算出部24cが、算出された間隔指標値に基づいて、俯瞰画像上で標示のパターンの間隔が所定の範囲内で揃う俯瞰パラメータを算出して俯瞰パラメータ記憶部25に記憶する。
(もっと読む)
ステレオ画像生成装置、ステレオ画像生成方法及びステレオ画像生成用コンピュータプログラム
【課題】各カメラによる画像上で特徴点が偏在している場合に算出された補正パラメータが適切か否かを判断可能なステレオ画像生成装置を提供する。
【解決手段】ステレオ画像生成装置は、被写体が写った第1及び第2の画像から抽出された被写体上の同一の点に対応する複数の特徴点の組に基づいて補正パラメータを算出する補正パラメータ算出部12と、各特徴点の組について補正パラメータを用いて少なくとも一方の画像上の特徴点の位置を補正して、補正後の特徴点間の距離を求めることで補正誤差量を算出する補正誤差算出部13と、特徴点の偏在度を求める偏在度算出部14と、偏在度が大きいほど補正誤差量に対する閾値を小さくするようにその閾値を決定する閾値決定部15と、補正誤差量が閾値以下である場合に補正パラメータを用いて第1及び第2の画像のうちの少なくとも一方における被写体の位置を補正する補正部17とを有する。
(もっと読む)
画像間差分装置および画像間差分方法
【課題】外乱の影響を受け難いロバストな画像間差分技術を提供する。
【解決手段】勾配方向算出部14aは、画像を構成する各々の画素の画素位置における画素値の勾配方向を求める。ヒストグラム生成部14bは、各々の画素を対象画素として設定するとともに、対象画素の周囲にヒストグラム算出領域を設定し、ヒストグラム算出領域に含まれる画素の画素位置における勾配方向の度数分布を対象画素の画素位置におけるヒストグラムとして生成する。画素差分部14cは、第1の画像の差分対象画素の画素位置におけるヒストグラムと、第2の画像の比較対象画素の画素位置におけるヒストグラムと、の差分値を差分対象画素と比較対象画素との画素差分値として算出する。画像差分部14は、差分対象画素の画素位置における画素値を画素差分値に基づいて設定することにより差分画像を生成する。
(もっと読む)
車載カメラシステム及びその較正方法、及びその較正プログラム
【課題】撮像部の 内部パラメータと外部パラメータを容易に較正できる車載カメラシステムの較正方法を得ること。
【解決手段】車載カメラシステム1の較正方法は、撮像部307〜310により撮像された画像から予め設定された直線部分を有する認識対象物を認識し、画像から認識対象物の特徴点を抽出し、その特徴点を仮想球面に投影して仮想球面601に形成された特徴点列の形状に基づいて撮像部307〜310の内部パラメータを推定し、推定した内部パラメータを較正するとともに、特徴点に基づいて画像の俯瞰視点を算出し、その算出した俯瞰視点に基づいて撮像部307〜310の外部パラメータを推定し、その推定した外部パラメータを較正することを特徴としている。
(もっと読む)
画像処理装置
【課題】非可逆圧縮された画像データを処理する画像処理装置において、精度良くモスキートノイズを検出する。
【解決手段】画像処理機能を有する複合機1は、画像データに含まれる画素データを順々に選択するとともに、該選択した画素データを中心とした探索範囲に含まれる複数の画素データの輝度成分から決定される該探索範囲の背景色が一定の濃度以下となる白背景であるか否かを判定する輝度判定処理(S4)と、探索範囲に含まれる複数の画素データの色差成分にばらつきが有るか否かを判定する色差判定処理(S8、S14)と、探索範囲に含まれる複数の画素データが、輝度判定処理により白背景であると判定され、かつ、色差判定処理によりばらつきが有ると判定された場合に、選択した画素データにモスキートノイズが有ると検出するノイズ検出処理(S10、S18)と、を実行する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】 地色に色成分を持つ用紙の場合、色成分毎に地色の特定を行うと、それぞれの色のバランスを含めて特定する必要があり、そのバランスが崩れると地色が除去されないばかりか色相が変化してしまう。また、複数の色成分のそれぞれに地色調整を行う場合に、除去すべき地色がどのような調整値により除去されるのかわかりにくい。
【解決手段】 読取手段が生成した画像データから原稿の地色を除去するために、ユーザは当該画像データを確認しながら、複数の色成分のそれぞれの除去レベルを当該複数の色成分ごとに設定する。そしてユーザの設定に基づいて、画像データから原稿の地色を除去する処理を実行する。
(もっと読む)
21 - 40 / 10,652
[ Back to top ]