
Fターム[5B057DB09]の内容
画像処理 (340,757) | 分析部 分析画像の特性 (30,351) | 多値 (10,652)
Fターム[5B057DB09]に分類される特許
61 - 80 / 10,652
相関演算装置
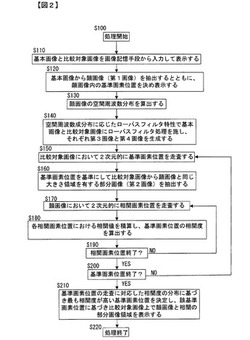
【課題】一律な照明変動や空間的に低周波な照明ムラに対するロバスト性が高く、かつSSDAの手法の適用により演算の高速化が可能な、新たな差分総和演算を行うことができる相関演算装置を提供する。
【解決手段】相関演算装置は、位置変数に依存した関数である第1関数データおよび第2関数データに対してローパスフィルタ処理を施し、第3関数データおよび第4関数データを生成するローパスフィルタ手段と、位置変数の1つの変数値における第1関数データと第4関数とを乗じた第1積データと、該変数値における第2関数データと第3関数データとを乗じた第2積データとの差分に基づき、該変数値における第1積データと第2積データとの相関値を算出し、変数値が変化する毎の相関値を積算して得られる積算値に基づき、第1関数データと第2関数データとの相関度を算出する相関演算手段とを備える。
(もっと読む)
画像処理装置および画像処理プログラム

【課題】文字の線幅に依存することなく、また色背景中の文字や色枠等についても、良好に再現した二値画像を取得することができる画像処理装置を提供する。
【解決手段】境界抽出部1は処理対象画像から濃度境界や色境界などの境界を抽出する。第1距離取得部2は、注目画素から境界までの最短距離を第1距離として取得する。参照領域設定部3は、第1距離取得部2で取得した第1距離に応じた大きさの注目画素を含む参照領域を設定する。例えば第1距離にある境界を跨ぐ大きさの注目画素を設定する。二値化部4は、処理対象画像から参照領域設定部3で設定した参照領域の画素値を読み出し、その画素値の平均値を閾値として注目画素を二値化する。
(もっと読む)
画像処理装置
【課題】ステレオカメラから得られた情報をもとに、夜間のさまざまな光点の中から、対向車のヘッドライトや先行車のテールライトのみを抽出し、ドライバーにとってより安全な視界を提供する。
【解決手段】第1の撮像素子と第2の撮像素子で撮像した2つの画像から検知対象物候補までの第1の距離情報を算出する第1の距離情報算出手段と、第1の撮像素子で撮像した画像から検知対象物候補までの第2の距離情報を算出する第2の距離情報算出手段と、第1の距離情報と第2の距離情報を比較し、比較した比較結果に基づいて検知対象物候補から対象物を検知する対象物検知手段と、を有する。
(もっと読む)
高品質画像及び映像アップスケーリングのためのシステム及び方法
【課題】画像/映像処理の強化技術を提供する。
【解決手段】高品質高解像度画像及び映像を生成する低複雑性アップスケーリング方法。エッジの滑らかさ及び鮮明度が維持され、オーバーシュートアーチファクト及び「エッジ膨脹」の問題が排除される。エッジ滑らかさを得てエッジに沿うジャギー・アーチファクトを除去するために、2直交方向に基づく双方向フィルタリングを用いて高解像度ピクセルを生成する。エッジ方向に近い方向は重み付けが大きく、エッジ方向から遠い方向は重み付けが軽い。各方向の重みは、方向ベクトル差測定方法により判断される。オーバーシュートアーチファクトを解除して肉厚エッジの問題を解決するために、両側補間法を実行する。両側補間法を用いて補間結果を優勢な移行が望ましい位置に向けて押し、それによってオーバーシュートアーチファクトが除去される。ぼけて肉厚ではなく薄くて鮮明なエッジが得られる。
(もっと読む)
画像処理装置、車両システム、及び、画像処理方法
【課題】天候及び距離によらず好適に物体までの距離を算出する。
【解決手段】画像処理装置は、取得された第1の車両の前方の画像から、第1の車両の前方の第2の車両の画像を検出する車両検出部と、第1の車両と第2の車両との距離を算出するために必要な複数のパラメータのうち、第2の車両の画像と前方の画像とから取得できないパラメータを判定する状況判定部と、第2の車両の画像と前方の画像とからパラメータを取得し、取得されたパラメータによって第1の車両と第2の車両との距離を算出する少なくとも一つの距離測定部と、を備え、状況判定部が、取得できないパラメータを判定した場合、少なくとも一つの距離測定部は、状況判定部によって判定された取得できないパラメータ以外のパラメータを用いて第1の車両と第2の車両との距離を算出するため、第2の車両の画像と前方の画像とを取得する。
(もっと読む)
会話映像表示システム
【課題】視聴者が会話人物の視線方向を分かりやすく、会話人物の存在感を感じられる会話映像表示システムを提供する。
【解決手段】会話画像及び会話の各人物の頭部姿勢データを処理して会話状況を映像表示するシステムであり、各人物の位置と対応して配置された複数のスクリーン403と、各スクリーン403に各人物毎の画像を投影する映像投影装置401と、スクリーン403の姿勢を制御するアクチュエータ402と、スクリーン403の姿勢を、それに投影される画像中の人物の頭部姿勢と同期して変化させるべく、頭部姿勢データからアクチュエータ402の制御信号を生成する制御信号生成手段303と、画像上における各人物の顔領域を検出する顔位置検出手段301と、画像中の検出された顔領域を中心とした領域を、その人物の画像が投影されるスクリーン403の姿勢に応じて写像して映像投影装置401に出力する画像写像生成手段302を有する。
(もっと読む)
人物誘導ロボット
【課題】人物を的確に認識すると共に、その人物を確実に目的地に誘導することのできる人物誘導ロボットを提供する。
【解決手段】ロボットR1の周囲における静止中または移動中の人物を認識する人物認識手段100と、ロボット自体を移動させる移動手段200と、誘導すべき人物に対して、誘導に必要な情報を移動経路を構成する床面または移動経路周辺の壁面に投影して表示する表示手段300と、該表示手段で表示された表示内容に対する誘導すべき人物による入力指示を検出する検出手段400と、検出手段によって検出された入力指示に基づいて、移動手段および表示手段を制御する制御手段500とを備える。
(もっと読む)
画像処理方法、および画像処理装置
【課題】学習データベースに格納されるデータ数が少ない場合に、より高画質な出力画像を生成する画像処理方法等を提供する。
【解決手段】学習データベースに格納された第2学習データに処理を行ったデータである第3学習データを処理ごとに複数生成する第1生成ステップ(S1003)と、複数の第3学習データの中から、入力画像の特徴データと最も類似度の高い第3学習データである選択データを選択する選択ステップ(S1004)と、選択データの生成に用いられた第2学習データと、これに対して選択データを生成するために行われた第1処理とを特定し、特定した第2学習データと対になる第1学習データに第1処理を行うことによって高周波データを生成する第2生成ステップ(S1005)と、高周波データが表す画像を入力画像に加えた出力画像を生成する第3生成ステップ(S1006)とを含む。
(もっと読む)
車外環境認識装置および車外環境認識方法
【課題】発光源が点灯したときの絶対的な輝度を利用して、発光源の点灯有無を高精度に判断する。
【解決手段】車外環境認識装置は、車外環境の明るさに応じた第1露光態様で第1画像を取得すると共に、発光源が自発光しているか否かを判別可能な、露光時間が第1露光態様と異なる第2露光態様で第2画像を取得し、第1画像に基づき検出領域内で先行する車両が占有する車両領域を特定し、第2画像の輝度に基づいて発光源の位置を特定し、車両領域と発光源の位置とを対応付ける(S316)。
(もっと読む)
画像処理装置、画像処理方法、および記録媒体
【課題】簡単に、多重露光による画像を得ることができるようにする。
【解決手段】画像合成部は、入力画像に含まれる被写体の領域を含む画素の加算を行う合成処理を行い、入力画像の被写体を検出する被写体検出部における検出結果に基づいて、合成処理を終了する。本技術は、例えば、多重露光撮影の画像処理を行う画像処理装置に適用できる。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】様々な位置姿勢や形状のワークに対応可能で、かつ、迅速に最大内接円を抽出可能な画像処理装置、画像処理方法及び画像処理プログラムを提供すること。
【解決手段】撮像部2によりワークWが撮像された元画像を取得する元画像抽出部31と、元画像抽出部31により取得された元画像を2値化して、元画像からワークWの概略領域を特定する領域特定部32と、領域特定部32手段により特定された概略領域を所定回数収縮処理する収縮処理部34と、元画像抽出部31により取得された元画像からワークWの輪郭線を抽出する輪郭線抽出部35と、輪郭線抽出部35により抽出されたワークWの輪郭線と収縮処理部34により収縮処理された収縮領域とを合成し、収縮領域の領域内で輪郭線に内接する最大内接円の中心点を探索して、中心点を中心としたワークWの内接円を抽出する最大内接円選定部36と、を備えた。
(もっと読む)
病理診断支援装置、病理診断支援方法、及び病理診断支援プログラム
【課題】線維化に関連する特定物質の占有率を自動で算出して診断支援情報として提供することができる病理診断支援装置、病理診断支援方法、及び病理診断支援プログラムを提供する。
【解決手段】本発明による病理診断支援装置100は、染色標本画像の画素値に基づいて、標本画像中の病変を検出するための指標となる少なくとも1種の特定物質を分類する画像分類部102と、標本画像に含まれる組織領域を抽出する組織領域抽出部103と、組織領域を複数の区画に分割する画像分割部104と、画像分類の結果に基づいて、複数の区画のそれぞれについて、少なくとも1種の特定物質の区画内での占有率を算出する特定物質占有率算出部105と、算出した複数の区画の占有率から、標本画像における特定物質占有率の中間値を決定し、当該中間値を診断支援情報として提供する診断支援情報提供部106と、を備える。
(もっと読む)
判定方法および記録装置
【課題】管理者のスキルに依存しないキャリブレーション実行の要否判定を低コストで行う。
【解決手段】キャリブレーションの実行の要否を判定する判定方法であって、キャリブレーション実行の要否を判定する閾値を設定する設定工程と、キャリブレーションチャートが構成されたパッチ数よりも少ないパッチ数で構成され、前記キャリブレーションチャートを構成するパッチから構成された複数のパッチから成るチェックチャートを記録し、測色手段により前記チェックチャートのそれぞれのパッチを測色して測色値を取得する取得工程と、予め記憶されているチェックチャートのパッチの目標測色値と、前記取得工程で取得された測色値と、前記閾値とに基づいて、前記キャリブレーションの実行の要否を判定する判定工程を備える。
(もっと読む)
画像処理装置、サーバ、携帯端末装置、及び画像処理方法
【課題】渋滞時においても走行速度の増減により画質を切り替える場合でも、表示させる撮像画像としての品質を向上する。
【解決手段】最終的な画質設定値である明るさ出力値Lが、次信号離間距離Dに応じた明るさ切片値Cが設定される停車状態(V=0)と、参照設定値Lcに固定された走行速度域(V≧Vs)との間に、明るさ出力値Lを車両速度Vに対応して連続的に変化させる連続変化速度領域(0<V<Vs)を設けている。この連続変化速度領域においては、当該連続変化速度領域を挟む2つの固定速度領域(V=0、V≧Vs)のそれぞれに固定的に設定されている明るさ出力値Ls,Lcの間で車両速度Vに対し線形比例するよう明るさ出力値Lを変化させている。また明るさ切片値Cは、車両100が信号機200に近づくに従って変化させている。
(もっと読む)
画像処理装置および画像処理方法、並びにプログラム
【課題】多視点からの画像データを用いて、リフォーカス処理と高解像度化処理とを同時に行う場合、どの視点から見ても被写体上の同一の点は同じ輝度(色)に見えている必要がある。また、被写体が仮想的なピントを合わせる面上に存在する必要がある。そのため、上記条件から逸脱している場合、画質劣化が生じる。
【解決手段】仮想撮像系が合焦する面の情報と複数の視点の配置の情報とから、前記複数の画像データの画素が前記仮想撮像系の画像上のどの位置に配置されるかを表す画素配置パラメータを算出し、画素配置パラメータから前記複数の画像データ間の前記仮想撮像系の画像上での画素値の整合度を算出する。そして、整合度から前記仮想撮像系の画像上での画素位置の近傍にある画素の画素補間パラメータを算出し、前記配置パラメータと前記画素補間パラメータとを用いて、前記複数の画像から画像合成を行う。
(もっと読む)
車両用周辺監視装置
【課題】運転者が車両後方を主体とした周辺の状況を直感的に把握できる自然な画像を出力することが可能な車両用周辺監視装置の提供。
【解決手段】車両用周辺監視装置は、処理装置を含み、処理装置は、現時点の自車位置より所定距離後方に位置するカメラにより撮像した画像に基づいて、自車の前進走行中に、自車に搭載される表示装置に、自車後方から前方に自車を視た画像又は映像(自車後方前向き画像)を出力することを特徴とする。
(もっと読む)
画像処理装置、画像処理方法及びコンピュータプログラム
【課題】複数の人物が動きのあるポーズをとる場合でも、撮影した画像にて人物の顔を小顔に見せる加工処理を有効に行なうことができる画像処理装置、画像処理方法及びコンピュータプログラムを提供する。
【解決手段】顔検出により得られた顔領域から一の顔領域を選択し、選択した顔領域内で特定されている目、鼻又は口の領域の位置に基づき、顔中心を特定する。選択した顔領域に対応する顔への小顔率を設定し(S96)、設定した小顔率で、マスクが掛けられた作業領域内の各画素をグリッド毎に、顔中心へ向けて移動させ(S97)、小顔処理を実現する。
(もっと読む)
車外環境認識装置および車外環境認識方法
【課題】対象物の特定精度を向上する。
【解決手段】
車外環境認識装置130は、複数の色識別子と輝度範囲とを対応付けて保持しておき、車外環境を撮像した画像を取得し、自車両との相対的な位置関係に応じて画像の検出領域を複数の特定領域に分割し(S306)、特定領域毎に色識別子に対応付けられた輝度範囲を再設定し(S308)、検出領域内の複数の対象部位の輝度と対象部位が位置する特定領域に再設定された輝度範囲とに基づいて、対象部位に色識別子を設定し(S310)、水平距離の差分および高さの差分が所定範囲内にある1または複数の対象部位をグループ化する(S312)。
(もっと読む)
分布評価装置、分布決定装置、画像処理装置およびプログラム
【課題】与えられた確率密度関数に基づいて、濃度またはサイズが異なる配置物の分布を評価するとともに、濃度またはサイズが異なる配置物を分布させることを可能とする。
【解決手段】分布決定装置は、有界な空間X上の点x、y∈Xの距離を変数とする関数frにより定められる相互影響値fr(|x−y|)に、予め与えられた確率密度関数ψによって定められる重み関数値ωψ(x)、ωψ(y)を乗じるとともに、さらに点x、yの濃度または大きさを表す確率密度関数値φ(x)、φ(y)を乗じ、全てのx、yについて総和した値であるφの加重エネルギーを算出して、φの加重エネルギーによりψとφとの近似度を評価し、φの加重エネルギーを降下させることによって、φによりψを近似する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】運動の有効性に関するフィードバックを目に見える形でユーザに呈示することのできる仕組みを提供すること。
【解決手段】入力画像に映る人物の運動を認識する認識部と、前記認識部により認識される前記運動の有効性に応じて異なる仮想オブジェクトを前記入力画像に重畳する表示制御部と、を備える画像処理装置を提供する。前記画像処理装置は、前記認識部により認識される前記運動の有効性を示すスコアを算出するスコア算出部、をさらに備えてもよく、前記表示制御部は、前記スコア算出部により算出される前記スコアの大きさを表現する前記仮想オブジェクトを前記入力画像に重畳してもよい。
(もっと読む)
61 - 80 / 10,652
[ Back to top ]