
Fターム[5B057DC02]の内容
Fターム[5B057DC02]の下位に属するFターム
Fターム[5B057DC02]に分類される特許
201 - 220 / 569
欠陥分類方法、プログラム、コンピュータ記憶媒体及び欠陥分類装置
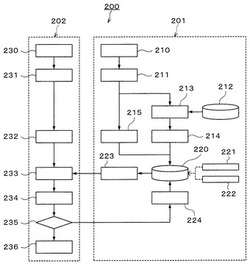
【課題】欠陥画像がない場合又は欠陥画像が少数しかない場合でも、撮像された基板の検査対象画像から当該基板の欠陥を適切に分類する手段の提供。
【解決手段】欠陥分類装置200は、設計手段201と診断手段202を有している。設計手段201ではモデル生成部213において、テンプレート記憶部212内の欠陥テンプレートと教示用画像を合成して欠陥モデルを生成する。第1の分類クラス設定部214では、欠陥モデルにおける欠陥の特徴量を算出し、欠陥の分類クラスを設定する。欠陥の特徴量と分類クラスとの関係は、記憶部220に記憶される。診断手段202では特徴量算出部232において、ウェハの検査対象画像から欠陥の特徴量を算出する。分類部233では、特徴量算出部232で算出された欠陥の特徴量に基づいて、記憶部220内の欠陥の特徴量と分類クラスとの関係から、ウェハの欠陥を分類クラスに分類する。
(もっと読む)
画像処理装置および画像処理方法並びにプログラム

【課題】画像処理装置において、カラー画像から精度の高い距離データを取得できるようにする。
【解決手段】被写体を2つの視点から撮像して得た、各々が複数の色の濃淡画像で構成された一対の画像データから被写体までの距離を算出して立体画像データを生成する画像処理装置において、一対の画像データを入力し、入力された一対の画像データの複数の色の複数の画素について距離を算出し、入力された一対の画像データの少なくとも一方の画像データにおいて、画像データを構成する複数の色の濃淡画像のうちから最も距離の算出に適する1つの色の濃淡画像を選択し、選択された色の濃淡画像において算出された距離のデータを記録する。
(もっと読む)
画像監視装置
【課題】設置時に煩雑な作業を要することなく、監視領域の人物を撮影した監視画像から、不審人物の有無を判定可能な画像監視装置を提供する。
【解決手段】画像監視装置10は、監視画像を順次取得する撮像部100と、監視画像から人物領域を検出する人物領域検出手段211と、予め正面を向いた顔の特徴点配置を記憶する配置情報記憶手段220と、人物領域から顔の特徴点を抽出し、配置情報記憶手段220の情報と比較して、正面向きの顔に対する特徴点位置のずれ量を検出する顔向き検出手段212と、特徴点位置のずれ量が顔を背けた状態に対応する所定量以上であれば人物領域について不審行動と判定する不審行動判定手段214と、順次取得される複数の監視画像において対応する人物領域を追跡する追跡手段213と、追跡手段が追跡した人物領域が不審行動と判定された回数に基づき不審人物と判定する不審人物判定手段215とを有する。
(もっと読む)
画像処理装置および画像処理方法並びにプログラム
【課題】画像処理装置において、カラー画像から精度の高い距離データを取得できるようにする。
【解決手段】被写体を2つの視点から撮像して得た、各々が複数の色の濃淡画像で構成された一対の画像データから被写体までの距離を算出して立体画像データを生成する画像処理装置において、一対の画像データを入力し、入力された一対の画像データの複数の色の複数の画素について距離を算出し、入力された一対の画像データの少なくとも一方の画像データにおいて、画像データを構成する複数の色の濃淡画像を複数の所定領域に分割し、分割された所定領域毎に、複数の色の濃淡画像のうちから最も距離の算出に適する1つの色の濃淡画像を選択し、選択された色の濃淡画像において算出された距離のデータを記録する。
(もっと読む)
画像処理装置および画像処理方法並びにプログラム
【課題】画像処理装置において、カラー画像から高速で且つ精度の高い距離データを取得できるようにする。
【解決手段】被写体を2つの視点から撮像して得た、各々が複数の色の濃淡画像で構成された一対の画像データから被写体までの距離を算出して立体画像データを生成する画像処理装置において、一対の画像データを入力し、入力された一対の画像データの少なくとも一方の画像データにおいて、画像データを構成する複数の色の濃淡画像を複数の所定領域に分割し、分割された所定領域毎に、複数の色の濃淡画像のうちから最も距離算出に適する1つの色の濃淡画像を選択し、選択された色の濃淡画像とこの濃淡画像に対応する色の他方の画像データの濃淡画像とから距離を算出する。
(もっと読む)
図柄素材の配置を利用した画像への情報データ埋め込み方法および情報データ取り出し方法ならびに情報データ埋め込み装置および情報データ取り出し装置
【課題】様々な形状の図柄を配置した画像に対して、頑強に多くの情報データを人に気づかれないように埋め込む、ならびに取り出す方法ならびに装置や画像処理システムを提供すること。
【解決手段】図柄の素材となる画像に幾何的な変換を施して配置する際に、マスク領域における被覆割合を意図的に操作することにより、任意の情報データ、例えばURLの文字列コード、を分割してから配置して埋め込む。埋め込まれた情報データを取り出すためには、生成された画像を撮影することによって得られる画像データから、マスク領域に対する図柄の被覆割合を計算して相当する情報データを検出し、さらにブロック領域の配置順等から埋め込まれた全情報データを復号する。
(もっと読む)
画像処理装置、撮像装置及び画像処理方法
【課題】重像間変位計測の精度を向上し、被写体までの距離を高精度で計測可能とする。
【解決手段】被写体像が多重化された多重像画像を取得する画像取得部10Aと、画像取得部10Aで取得した多重像画像に対してフィルタリングを行なうフィルタリング部104と、フィルタリング部104で得たフィルタリング済みの画像から、多重像の自己相関値を算出する自己相関値算出部106と、自己相関値算出部106で得た自己相関値を用いて多重像画像の重像間変位を算出する重像間変位算出部107とを備える。
(もっと読む)
撮像装置および撮像方法
【課題】露光量を変え複数回の撮影を行って画像を合成することなく、1回の撮影でダイナミックレンジを拡大することができる撮像装置および撮像方法を提供する。
【解決手段】輝度レベル判定部60により所定の規定値以上の出力の画素が有ると判定した場合に、その周辺の画素からの出力に基づいて所定の規定値以上の画素の出力を補正する飽和画素補正処理部61と、飽和画素補正処理部61によって補正を行う際の補正係数を設定する補正係数設定部63と、被写体に対する撮影シーンを判定する撮影シーン判定部と、人物の顔部を検出する顔検出部を備え、補正係数設定部63は、撮影シーン判定部により判定した撮影シーン情報及び顔検出部による顔部検出情報を入力し、入力したこれらの情報に基づいて、飽和画素補正処理部61によって補正を行う際の補正係数を設定する。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】画像における顔の左右の目の大きさのバランスが悪いと、画像の印象が悪かった。
【解決手段】対象画像における顔の左右の目の大きさを表す情報を検出する検出部と、上記検出された情報に基づいて、左右の少なくとも一方の目の大きさに対する補正量を決定する補正量決定部と、上記決定された補正量に基づいて、左目を含む領域と右目を含む領域との少なくとも一方の領域に対する画像の変形処理を行なう変形部とを備えることを特徴とする画像処理装置とした。
(もっと読む)
画像処理方法、画像処理装置及び画像処理プログラム
【課題】 複数の粒状体が撮像された画像から粒状体の像をサンプルとして精度良く抽出することができる画像処理方法、画像処理装置及び画像処理プログラムを提供する。
【解決手段】 画像処理装置1は、複数の粒状体が撮像された元画像にエッジ検出フィルタ処理を施すことで取得したエッジ検出画像について、所定の明度範囲内の各明度を閾値として、粒状体であると判定された領域の領域数を閾値毎に算出し、領域数が最大となる明度を最適閾値として、そのときに粒状体であると判定された領域を粒状体のサンプルとして抽出する。
(もっと読む)
スマートカメラ及びロボットビジョンシステム
【課題】ロボットの各種制御等に際し、ネットワークを介してのより自由度の高い、しかもより効率のよいデータ授受を可能とするスマートカメラ、及び該スマートカメラを備えるロボットビジョンシステムを提供する。
【解決手段】スマートカメラは、第1コマンドインタフェースCIF1(以下、CIF1)と第2コマンドインタフェースCIF2(以下、CIF2)とを有する。画像処理プロセスDPはCIF1から入力される指令に基づいて撮像データDT1を画像処理し、ロボットの制御に有益な情報からなる結果データDT3を生成してこれを結果データバッファDB3に保存し、またCIF1に出力可能にする。一方、イメージセレクタSWはCIF2から入力される指令に基づいて撮像データDT1または処理画像データDT2のいずれかをモニタ画像データとして選択してこれをCIF2から出力する。
(もっと読む)
画像中の顔領域検出における信頼度の算出
【課題】画像中の顔領域検出における信頼度をより精度良く算出することを可能とする。
【解決手段】画像処理装置は、対象画像データの表す対象画像における顔の画像に対応する画像領域である顔領域の検出を行う顔領域検出部と、検出された顔領域における顔の器官の画像に対応する画像領域である器官領域の検出を行う器官領域検出部と、を備える。画像処理装置は、また、検出された顔領域について、顔領域の検出結果と器官領域の検出結果とに基づき、顔領域が真に顔の画像に対応する画像領域であることの確からしさを表す顔領域信頼度を算出する信頼度算出部と、を備える。
(もっと読む)
顔領域に基づき設定された画像領域を対象とした補正処理
【課題】画像中から検出された顔領域に基づき設定された対象画像領域を対象とした所定の補正処理を行う際に、補正結果が不自然なものとなる事態の発生を抑制することを可能とする。
【解決手段】画像処理装置は、対象画像データの表す対象画像における顔の画像に対応する画像領域である顔領域の検出を行う顔領域検出部と、検出された顔領域における顔の器官の画像に対応する画像領域である器官領域の検出を行う器官領域検出部と、検出された顔領域に基づき設定された対象画像領域を対象に、器官領域の検出結果に基づき設定された補正内容で所定の補正処理を実行する補正処理部と、を備える。
(もっと読む)
撮像装置、撮像方法及びプログラム
【課題】ユーザに煩雑な設定作業を強いずに、撮影シーンに応じて効率的に顔検出する。
【解決手段】被写体像を撮影する撮像系11〜14と、撮像系11〜14で撮影する被写体像の撮影範囲中から顔部分を検出する顔検出処理部32と、複数の撮影シーンそれぞれに対応した、撮影範囲内の顔の状況を示す顔状況データを記憶したプログラムメモリ18と、プログラムメモリ18で記憶した複数の撮影シーンから1つを選択するキー入力部19と、キー入力部19で選択した撮影シーンに基づいてプログラムメモリ18から顔状況データを読出し、読出した顔状況データにより顔検出処理部32が顔検出処理を行なう顔検出処理条件を変更設定する制御部16、メインメモリ17及びプログラムメモリ18とを備える。
(もっと読む)
画像表示装置およびその制御方法
【課題】カメラを搭載するデジタルフォトフレームにおいて面倒な操作を必要とせずに記憶されている画像を表示する通常表示モードと撮影した画像を鏡像表示する鏡像表示モードとを切り替える。
【解決手段】近接センサにより近接物が感知されなかったときには(S130)、内蔵メモリやメモリカードに保存されている画像ファイルを表示パネルに表示する通常表示モードを実行し、近接センサにより近接物の近接が感知されると共にカメラにより撮影された画像の中から顔認識処理により人物の顔が認識されたときには(S130,S180)、撮影された画像を鏡のように左右反転して表示する鏡像表示モードを実行する(S220)。
(もっと読む)
解析装置
【課題】処理コストを増大させることなく、3次元動きベクトルと物体の形状計測とを精度良く行う。
【解決手段】3D動きベクトル算出部26は、変化量算出部25により算出された3次元位置の変化量と、傾斜情報算出部22により算出された傾斜情報と、2D動きベクトル算出部24により算出された2次元動きベクトルとに基づいて、各計測点を基準としたときの各計測点に対応する移動点の3次元位置の変化量を推定し、推定した変化量を各計測点の3次元動きベクトルとして算出する。
(もっと読む)
対象物認識装置、指示装置およびプログラム
【課題】指示装置が指示する対象物を簡易かつ高精度に測定することができる対象物認識装置等を提供する。
【解決手段】平面上の3つ以上の点からなる第1基準点および1つの点からなり第1基準点を頂点として形成される多角形の外側にある第2基準点が配置された指示装置100を撮影するカメラ20と、第1基準点の互いの位置関係、第2基準点の第1基準点との位置関係および対象物の三次元位置を記憶する記憶部と、撮影部により撮影された第1基準点の画像および第2基準点の画像の位置関係から、第1基準点の画像と第2基準点の画像とを識別する識別部と、記憶部から第1基準点の互いの位置関係、第2基準点の第1基準点との位置関係および対象物の三次元位置を読み出し、識別部により区別された第1基準点の画像および第2基準点の画像から指示装置100が指示する対象物300を特定する演算部と、を備えることを特徴とする対象物認識装置200。
(もっと読む)
マーカ検出識別装置およびそのプログラム
【課題】撮像された映像をマーカが妨害することなく、かつ、精度よくマーカを検出・識別することが可能なマーカ検出識別装置を提供する。
【解決手段】マーカ検出識別装置3は、不可視マーカごとに、当該不可視マーカが配置されている位置の近傍領域における色特徴量を予め記憶する記憶手段31と、不可視光撮像系で撮像した不可視光画像において、予め定めた輝度値を閾値として不可視マーカを検出するマーカ検出手段34と、マーカ検出手段34で検出された不可視マーカの位置に対応する可視光撮像系で撮像された可視光画像の位置の近傍領域における色特徴量を生成する検出マーカ色情報生成手段35と、検出マーカ色情報生成手段35で生成された色特徴量と、記憶手段31に記憶されている色特徴量との類似の度合に基づいて、不可視マーカを個別に識別するマーカ識別手段36と、を備える。
(もっと読む)
撮像装置
【課題】光変調画像の画素値を適正な値とする。
【解決手段】演算処理部4は、領域抽出処理で抽出される顔領域の位置(画素の座標)と、顔領域の大きさから推定される被写体Xまでの距離とに基づき、被写体(人物の顔)Xとの距離が相対的に最も近くなる範囲内から1乃至複数個の発光ダイオード1aを選択する。そして、演算処理部4は、選択した1乃至複数個の発光ダイオード1aのみを点灯するように発光制御部2を制御する。故に、対象空間において人物の顔を含む狭い領域にだけ発光部1から変調光が照射されることになり、しかも、変調光の光量が人物の顔までの距離に応じたレベルに調整されるから、光変調画像の画素値を適正な値とすることができる。
(もっと読む)
顔画像の特徴点検出方法およびその装置
【課題】顔の特徴点を高い精度で、且つ短い処理時間で検出可能とする顔画像の特徴点検出方法およびその装置を提供することを目的とする。
【解決手段】顔を撮影して顔画像を取得する顔画像取得ステップと、顔画像に基づいて上下方向および/または左右方向の顔の向きを検出する顔向き角度検出ステップと、顔画像中で、探索の対象とする顔の特徴点毎に該特徴点を探索する探索範囲の位置および大きさを、顔向き角度検出ステップに検出された顔の向きに基づいて設定する探索範囲設定ステップと、探索範囲設定ステップで設定された各探索範囲の画像に基づいて、対応する特徴点をそれぞれ検出する特徴点検出ステップとを備える顔画像の特徴点検出方法である。
(もっと読む)
201 - 220 / 569
[ Back to top ]