
Fターム[5B057DC02]の内容
Fターム[5B057DC02]の下位に属するFターム
Fターム[5B057DC02]に分類される特許
61 - 80 / 569
画像計測装置、画像計測方法及びコンピュータプログラム
【課題】注目点の選定や注目点を追尾することが困難な複雑な形状の計測対象物であっても、また時間の経過とともに移動する計測対象物であっても、正確なキャリブレーションを実行することができ、所望の物理量を正確に計測することができる画像計測装置、画像計測方法、及びコンピュータプログラムを提供する。
【解決手段】フレーム画像をコマ送り再生表示し、コマ送り再生表示されたフレーム画像から、複数のフレーム画像の選択を受け付ける。選択を受け付けたフレーム画像を重ね合わせた合成画像を生成する。生成した合成画像を表示し、表示した合成画像上で所定の物理量を計測する。また、寸法が既知である球を計測対象物と同一の動画像に写り込むように配置し、計測対象物と球とを撮像して取得した動画像に基づいてキャリブレーションを実行する。
(もっと読む)
撮像装置

【課題】所望の表情を検出し損ねないようにするために、適切に表情評価値の閾値を変更する技術を提供すること。
【解決手段】被写体を含む画像データを取得する画像取得手段と、前記取得手段により取得された画像データにおいて、前記被写体の顔領域を検出する顔領域検出手段と、前記顔領域検出手段により検出された前記顔領域から、顔を構成する要素の形状に関する顔情報を抽出する顔情報抽出手段と、前記顔情報抽出手段により抽出された前記被写体の顔情報から特定の表情である度合いを表す表情評価値を算出する表情評価値算出手段と、前記表情評価値算出手段により算出された前記表情評価値に対応する表情評価閾値を設定する表情評価閾値設定手段、とを含み、撮影モードを設定する撮影モード設定手段を有し、前記撮影モード設定手段により設定された前記撮影モードにより前記表情評価閾値を変更することを特徴とする構成とした。
(もっと読む)
通行車両監視システム及び車両用監視カメラ
【課題】道路上の通行車両を正確に認識し、設置が容易で、かつ車両毎の走行状態の分析を負荷が集中することなく行うことができる通行車両監視システム及び車両用監視カメラを提供する。
【解決手段】通行車両監視システム1は、数珠繋ぎに接続され、車両の通行状況を撮像する複数の監視カメラ2と、その複数の監視カメラに接続されたセンタ装置4とからなる。 各監視カメラ2は、複数の撮像部21と、複数の画像から距離画像のデータを生成する立体計測部23と、距離画像に基づく基本監視部24と、メモリ27と、距離画像に基づいて認識された車両の識別情報を生成して、その識別情報と、その認識された車両についての時刻情報とを含む情報を前記記憶部に記録する計測及び記録処理部と、距離画像に基づいて、基本監視部とは別の監視処理を実行する追加監視部25を有する。
(もっと読む)
運転支援装置
【課題】車載カメラとして単眼カメラを備えた安価な構成により、従来よりコスト低減を図って、撮影カメラの撮影画像から将来の(その後の)TTCを正確に推定することができる車両支援装置を提供する。
【解決手段】車載カメラとしての単眼カメラ2により自車両1の周辺を撮影し、演算部3の近似手段により、単眼カメラ2の複数時点の撮影画像中の障害物の撮影倍率から衝突可能性の経時変化特性を近似し、演算部3の推定手段により、近似手段の近似結果に基づいて将来の衝突可能性を推定する。
(もっと読む)
三次元形状測定装置、三次元形状測定方法、構造物の製造方法および構造物製造システム
【課題】計測時間を短縮化でき、装置構成が複雑化することを防ぐ。
【解決手段】三次元形状測定装置1は、測定対象物11上に投影パターンを照射する投影部13と、測定対象物11を撮像する撮像部14と、投影部13に縞パターンを照射させ、照射させる縞パターンの位相を変化させながら、撮像部14に測定対象物11を繰り返し撮像させるとともに、測定対象物11上に照射させた縞パターンの画像を複数取得する第1の制御部と、第1の領域のみに所定の光を照射させて撮像した第1の画像と、第2の領域のみに所定の光を照射させて撮像した第2の画像とを取得する第2の制御部と、第1の画像と第2の画像との差分に基づいて、縞パターンに含まれる縞の夫々を識別する基準線を検出する基準線検出部と、基準線に基づいて、測定対象物11の三次元形状を測定する形状測定部と、を備える。
(もっと読む)
車高計測装置
【課題】運転者自らが計測することなしにトレーラの実際の車高を計測することのできる車高計測装置を提供することを目的とする。
【解決手段】自車両の周囲の撮影画像を画像処理する画像処理手段11と、この画像処理手段11による処理画像に基づいて自車両が牽引するトレーラの車高を算出する算出手段13とを備え、算出手段13は、画像処理手段11が画像処理した自車両前方の撮影画像および自車両が牽引するトレーラ後方の撮影画像とに基づいて自車両が牽引するトレーラの車高を算出する。
(もっと読む)
画像処理装置、撮像装置、及びそれらの制御方法
【課題】映像中の対象物の動きの質に応じて、撮像時のボケの低減とランダム感の抑制とを両立可能な技術を提供する。
【解決手段】画像処理装置は、動く対象物を撮像した映像信号であって、前記対象物のぶれを含まない第1の映像信号と前記対象物のぶれを含む第2の映像信号とを入力する入力部と、映像信号を解析して前記対象物の動きを検出する動き検出部と、検出された動きの質に応じて、前記第1の映像信号と前記第2の映像信号を切り換え又は合成することにより出力映像信号を生成する出力制御部と、を有する。出力制御部は、等速度又は等加速度の動きである場合には第1の映像信号を、等速度又は等加速度の動きでない場合には第2の映像信号を出力する。或いは、等速度又は等加速度の動きでない場合には、等速度又は等加速度の動きである場合に比べ、第2の映像信号の重みを大きくする。
(もっと読む)
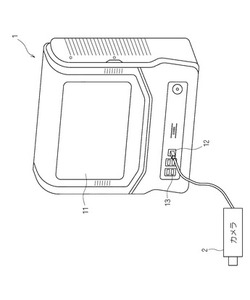
手指ジェスチャ検出装置
【課題】安価且つ高速に手指の状態を検出することが可能な手指ジェスチャ検出装置を提供する。
【解決手段】手指ジェスチャ検出装置は、光源11,12と、1つのカメラ20と、画像認識部30とからなる。光源11,12は、検出面1に入力される手指2に対して複数の位置から光を照射し、複数の照射光にそれぞれ対応する手指の複数の影の像21,22を検出面1上に形成するものである。1つのカメラ20は、検出面1に対して垂直方向に離れた位置に配置され、複数の光源11,12により形成される複数の影の像21,22及び手指2の像を撮像するものである。画像認識部30は、1つのカメラ20により撮像される複数の影の像21,22及び手指2の像を認識し、影の像21,22及び手指2の像の状態により検出面1に入力される手指2の状態を検出する。
(もっと読む)
情報端末装置
【課題】撮像画像を元に複数の人物の人間関係を容易かつ高い精度で推定できる情報端末装置を提供すること。
【解決手段】特徴量DB14は、人間関係を推定する判断基準となる顔についての特徴量を人間関係ごとに蓄積する。推定部12は、撮像部11から入力された画像から顔についての複数の特徴量を抽出し、抽出された複数の特徴量の各々における尤度を特徴量DB14に蓄積された顔についての特徴量を用いて人間関係ごとに算出し、算出された複数の尤度を統合して人間関係を推定力する。制御部13は、推定部12での推定結果に従って記憶部15から表示情報を読み出し、表示部16に表示させる。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】画像の種類によらず、縞状ノイズを適切に除去できるようにする。
【解決手段】除去対象間隔算出部102は、画像データ入力部101において入力した画像データから、撮像素子上での除去対象物の間隔Ncを算出する。そして、除去対象検出部103は、除去対象間隔算出部102で算出した除去対象物の間隔Ncから算出したピーク波長をもつバンドパスフィルタを用いて除去対象物を検出する。そして、画像補正部104は、除去対象検出部103で検出した結果に基づいて、画像データを補正する。
(もっと読む)
画像記録装置及び画像処理方法
【課題】高感度撮影画像の撮影者を特定するのを容易にすることを目的とする。
【解決手段】撮影者による撮影感度の設定操作に基づいて撮影感度を設定する設定手段と、設定手段で設定された撮影感度に基づいて埋め込みモードを選択する選択手段と、選択手段で選択された埋め込みモードに基づいて撮像手段で撮像された画像データ内に撮影に関する埋め込み情報を埋め込む埋め込み手段と、を有することによって課題を解決する。
(もっと読む)
画像処理装置、画像選択方法、及び、プログラム
【課題】連続して撮像された複数の画像において、特定の人物の存する画像の選択処理を適正に行う。
【解決手段】撮像装置100であって、特定の人物を含む複数の人が存する複数の画像を連続して撮像することにより取得する画像取得部6aと、特定の人物が有する特徴部(顔画像)を優先度と対応付けて複数の人物について記憶した人物登録DB7(第1登録テーブルT1)と、画像取得部により取得された複数の画像において、人物登録に記憶された優先度に基づいて特徴部(顔画像)を夫々検出する顔検出部5と、この顔検出部によって夫々検出された特徴部(顔画像)を、第1登録テーブルに記憶されている特徴部(顔画像)に基づいて夫々笑顔度を評価し、評価値を算出する評価値算出部b1と、この評価値算出部によって算出された評価値に基づいて記録すべき撮像画像を選択する画像選択部6bとを備える。
(もっと読む)
内視鏡画像処理システム
【課題】撮影された画像が様々な外観の病変部位であるか否かの推定をする。
【解決手段】病変部推定回路30は、分割回路31、選択回路32、輝度勾配算出回路33、ヒストグラム作成回路34、特徴量算出回路36、および判別回路37を有する。分割回路31は画像全体を分割して画像ブロックを設定する。選択回路32は単一の画像ブロックを選択する。輝度勾配算出回路33は選択された画像ブロックにおける第1〜第8の輝度勾配を算出する。ヒストグラム作成回路34は第1〜第8の輝度勾配のヒストグラムを作成する。特徴量算出回路36は第1〜第8の輝度勾配ヒストグラムにおける各階級の度数を用いて第1、第2の特徴量を算出する。判別回路37は第1、第2の特徴量に基づいて選択された画像ブロックが正常部位または第1〜第3の病変部位であるか否かを判別する。
(もっと読む)
視線検出装置、視線検出方法及びプログラム
【課題】目の隠れや利き目等に左右されない高精度な視線検知を実現する。
【解決手段】顔検出部1100は、画像データから顔を検出する。特徴量抽出部1300は、顔の向きに対応する特徴量を画像データから抽出する。視線信頼度算出部1400は、顔検出部1100により検出された顔に基づいて視線の信頼度を算出する。目選択部1500は、視線の信頼度に応じて目を選択する。目領域特徴量抽出部1600は、選択された目の目領域の特徴量を画像データから抽出する。視線推定部1700は、顔の向きに対応する特徴量と目領域の特徴量とに基づいて視線を推定する。
(もっと読む)
運転支援装置
【課題】運転者が障害物の周囲状況を直感的にかつより正確に確認でき、運転者の負担を軽減することができる運転支援装置を提供する。
【解決手段】移動体に設置された複数の撮像手段1001、3001と、撮像手段3001で撮像された画像を、路面モデルを基に撮像手段1001、3001の位置より上方の仮想視点または上方から直交投影の画像に変換する変換手段3008と、複数の撮像手段1001、3001の撮像画像間の視差を基に路面以外の3次元情報を検出する3Dマップ作成手段3007と、前記検出された3次元情報を基に前記視点変換された画像中の像の歪みを補正する3D画像合成手段3008と、前記歪み補正された画像を表示する表示手段3009とを具備する。
(もっと読む)
ユーザ指示取得装置、ユーザ指示取得プログラムおよびテレビ受像機
【課題】ユーザの自然な発話、動作によって機器を的確に指示制御することができ、ユーザが実際に指示を行っている場合のみ指示を取得するユーザ指示取得装置、ユーザ指示取得プログラムおよびテレビ受像機を提供する。
【解決手段】カメラCrによって撮影された映像から予め登録された複数のユーザのそれぞれを認識するとともにその顔の変化を検出し、当該顔の変化から複数のユーザのそれぞれの発話期間を生成する顔分析手段20と、映像から複数のユーザの手の動作を認識する手動作分析手段30と、発話期間に基づいて機器の周囲の音声を検出し、音響特徴量を用いて音声の内容および話者を認識する音声分析手段10と、顔分析手段20によって認識された複数のユーザに話者が含まれている場合、ユーザの顔の変化、手の動作、音声の内容に対して予め定められたコマンドを生成するコマンド生成手段40と、を備える。
(もっと読む)
画像処理装置および画像処理方法
【課題】観察距離が変化しても高輝度の蛍光領域を変化させることなく表示し、観察の定量性を向上する。
【解決手段】被写体Aに照明光および励起光を照射する照明部4と、被写体Aにおいて発生した蛍光を撮影して蛍光画像G1を取得する蛍光撮像部5と、被写体Aから戻る戻り光を撮影し戻り光画像G2を取得する戻り光撮像部5と、取得された蛍光画像G1および戻り光画像G2に、色空間を構成する異なる色情報を付与して複数のカラー画像を生成するカラー画像生成部18と、生成された複数のカラー画像を合成する画像合成部20とを備え、カラー画像生成部18が、蛍光画像G1および戻り光画像G2の少なくとも一方に、指数関数に近似させられる蛍光画像G1と戻り光画像G2との距離特性の指数を一致させる補正処理を施す画像処理装置6を提供する。
(もっと読む)
画像処理装置及びプログラム、並びに電子カメラ
【課題】 本発明は、例えば顔を補正する画像処理を行うときに視認性を向上させる手段を提供する。
【解決手段】 画像処理装置は、特徴領域設定部と、表示制御部とを備える。特徴領域設定部は、第1の画像の顔の位置に特徴領域を設定する。表示制御部は、第1の画像から特徴領域を部分的に切り出した第2の画像を画像と共に表示装置に表示させるときに、第1の画像の特徴領域と第2の画像とが少なくとも重ならないように表示させる。
(もっと読む)
位置姿勢計測装置、その処理方法及びプログラム
【課題】2次元画像上における画像特徴と3次元形状モデルを構成する幾何特徴とを対応付け、その結果に基づいて物体の位置及び姿勢の計測を行なう。
【解決手段】位置姿勢計測装置は、3次元形状モデルを保持するモデル保持手段と、物体の位置及び姿勢を示す概略値を取得する手段と、撮像装置により撮像された物体の2次元画像を取得する手段と、概略値に基づいて3次元形状モデルにおける幾何特徴を2次元画像上に投影し、当該2次元画像上に投影された3次元形状モデルの幾何特徴の方向を算出する手段と、2次元画像から画像特徴の方向を算出する手段と、算出された画像特徴の方向と、3次元形状モデルから算出された幾何特徴の方向とを比較することにより、画像特徴と幾何特徴とを対応付ける手段と、当該対応付けられた画像特徴と幾何特徴とにおける距離に基づいて概略値を補正することにより物体の位置及び姿勢を算出する位置姿勢算出手段とを具備する。
(もっと読む)
三次元データ管理システム
【課題】建築物の形状を計測し、その三次元データを検証可能な状態で記録し、前記建築物の竣工後であっても三次元モデルによって内部構造の検証を可能とする技術を提供する。
【解決手段】複数の工程によって建築物を構築する際、各工程の前記建築物をレーザ光で光走査し、前記建築物からの反射光に基づいて三次元データを取得し、前記三次元データの検証用データを当該三次元データと関連付け、前記各工程の三次元データを記憶する。そして、前記各工程の少なくとも2つの工程の三次元データを同一原点の座標系で出力し、前記検証用データに基づいて各三次元データの正当性を判定する。
(もっと読む)
61 - 80 / 569
[ Back to top ]