
Fターム[5B057DC02]の内容
Fターム[5B057DC02]の下位に属するFターム
Fターム[5B057DC02]に分類される特許
81 - 100 / 569
電子カメラ
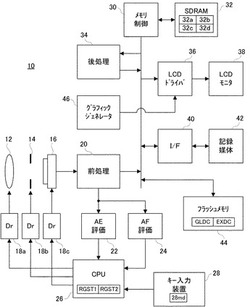
【構成】イメージャ16は、被写界を捉える撮像面を有して被写界像を繰り返し出力する。CPU26は、イメージャ16から出力された被写界像を1または2以上の特徴パターングループをそれぞれ代表する1または2以上の代表特徴パターンの各々と照合する。CPU26はまた、照合結果が符合条件を満足するタイミングに対応してイメージャ16から出力された被写界像に基づいて基準画像を作成し、作成された基準画像に相当する物体像の探索に用いる参照特徴パターンを1または2以上の特徴パターングループの少なくとも一部に属する複数の特徴パターンの中から選択する。
【効果】基準画像の作成に掛かる負荷および参照特徴パターンの選択に掛かる負荷が、低減される。
(もっと読む)
画像検査方法及び画像検査装置

【課題】正常製品群に基づいて作成された基準空間に基づいて決定された検査閾値と、被検査製品の画像のマハラノビス距離とを比較することでその被検査製品の画像の検査を行う画像検査方法、画像検査装置において、基準空間の質を高めること。
【解決手段】当初の基準空間を使用した検査の結果(S31〜S35)、不良と判定された被検査製品の画像である不良判定画像が、誤判定であるか否かが評価されたとして、電子計算機は、その評価によって誤判定であると評価された不良判定画像である誤判定画像を記憶装置に記憶させる(S37)。その記憶装置に記憶された誤判定画像の数量Nが、所定量N0に達しか否かを判定する(S38)。所定量N0に達した場合は(S38、Yes)、記憶装置から誤判定画像を読み出す(S39)。読み出した誤判定画像を当初の基準画像の群に加えて、基準空間を再度作成する(S40)。
(もっと読む)
電気機器の製造方法およびそれに用いられるターゲット設置用治具
【課題】電気機器を構成する構造物を精度良く3次元測定することにより、電気機器の組立を簡易にする。
【解決手段】構造部品の外形の寸法基準となる複数の位置にターゲットを設置する工程(S102)と、ターゲットの位置を画像解析することにより構造部品の形成寸法を3次元測定する工程(S103)とを備えている。また、構造部品の形成寸法の3次元測定結果に基づいて付設部品を形成する工程(S104)と、構造部品に付設部品を取付ける工程(S106)とを備えている。ターゲットを設置する工程(S102)は、上記複数の位置のうちターゲットを直接設置することができない設置不能箇所について、構造部品にターゲット設置用治具を取付けることにより上記設置不能箇所に対応した位置にターゲットを設置する工程を含む。
(もっと読む)
奥行推定装置、奥行推定方法および奥行推定プログラム
【課題】本発明は、被写体が黒い背景を持つため対応点が複数存在する場合や、前景の被写体に接近した一様な背景部分で対応点が複数存在する場合でも、奥行値の誤推定を防止することが可能な奥行推定装置を提供する。
【解決手段】奥行推定装置1は、映像入力手段10と、近傍画素の画素値を出力する近傍画素値出力手段15と、近傍画素の奥行値を出力する近傍奥行値出力手段25と、対応画素差分値を演算する対応画素差分演算手段20と、最小差分値、平均差分値、最小差分値または平均差分値にペナルティを加えた値の何れかを選択差分値として決定する差分値決定手段30と、平滑化を行う平滑化手段50と、平滑化差分値が最小となる仮定奥行値を、基準映像の各画素の奥行値とする奥行値決定手段60とを備える。
(もっと読む)
車両の周辺監視装置
【課題】物体位置特定手段と撮像手段とにおける光軸ずれ量を算出する手段を提供。
【解決手段】レーザレーダ10と、車両の周辺の画像を撮像する撮像手段12と、画像処理ユニット14から構成される。物体位置特定手段141は、レーザレーダ10からの信号により物体の位置を特定する。画像取得手段142は、赤外線カメラ12が撮影した画像をグレースケール画像として取得する。画像上の物体特定手段143は、物体位置特定手段141が特定した物体位置に対応する物体を、グレースケール上で特定する。
この情報に基づいて、光軸ずれを算出する。
(もっと読む)
画像回復装置、画像回復方法及びプログラム
【課題】オートフォーカス機構から被写体距離が得られない場合における画像回復の精度を向上させる。
【解決手段】被写体距離推定部115は、被写体距離を推定する。回復フィルタ演算部116は、推定された被写体距離に基づいて、画像データを回復するための回復フィルタを算出する。画像回復部107は、算出された回復フィルタを用いて画像データの回復を行う。
(もっと読む)
移動体軌跡図作成装置及びコンピュータプログラム
【課題】 移動体の撮影画像の処理に対してPTV法を用いなくても、移動体の軌跡画像の三次元表示を可能とする技術を提供する。
【解決手段】 複数のカメラにより撮影された時系列の画像データから、カメラ毎に、移動体の二次元軌跡画像を作成する手段11を有している。これにより、鳥等の移動体の二次元軌跡画像がカメラ毎に複数枚得られることになる。この二次元軌跡画像は線状の静止画像であるため、バイプレーン法等の三次元軌跡画像再構成手段を適用することで、容易に移動体の三次元の軌跡図を作成することができる。ステレオPTV法を用いる必要がなくなるため、屋外フィールドの鳥などの移動体の軌跡図作成用として適している。
(もっと読む)
画像処理装置、画像処理方法及び画像処理用コンピュータプログラム
【課題】動画像データに含まれる画像に重畳されたノイズを除去するとともに、画像内でのボケ度合いを均一化可能な画像処理装置を提供する。
【解決手段】画像処理装置1は、動画像データに含まれる第1の画像と少なくとも1枚の第2の画像との間で、第1の画像上の第1の画素についての動きベクトルを求め、動きベクトルを用いて少なくとも1枚の動き補償画像を作成し、第1の画像及び動き補償画像における、第1の画素に対応する画素の値のグループに対して時間フィルタ処理を行うことで第3の画像を作成し、そのグループに含まれる画素値のバラツキ度を算出し、バラツキ度が高いほど強くなるようにエッジ強調度を設定し、設定されたエッジ強調度に従って第3の画像における第1の画素に対応する画素のエッジを強調する。
(もっと読む)
車両周辺表示装置
【課題】画像の視認によって障害物の存在を分かり易く伝えることができる車両周辺表示装置の提供。
【解決手段】車両90の後方領域93の画像1を液晶ディスプレイ80に表示する車両後方表示装置100において、後方領域93を撮影し障害物画像7を含む後方画像3を生成するカメラ60及びデコーダ70と、障害物97を検出し車両90から当該障害物97までの距離BDを演算する複数のソナー20r,20c,20l及び演算装置10と、障害物画像7に対応する障害物97の存在を警告する警報画像5を、後方画像3に重畳することにより、液晶ディスプレイ80に表示される画像1を描画する描画装置40と、を備える。警報画像5は、上下方向の長さが予め固定された枠状の枠画像部5aと、枠画像部5a内に描画され、障害物97までの距離が縮小するほど上下方向における長さが縮小する距離表示画像部6と、を含む。
(もっと読む)
画像処理装置、及び画像処理プログラム
【課題】2時刻法により被撮像物の変状部分の位置を検出する確率が高い画像処理装置を提供する。
【解決手段】第1撮像時間帯に被撮像物を撮像して得られた複数の画像フレームからなる第1温度画像データと、第2撮像時間帯に被撮像物を撮像して得られた複数の画像フレームからなる第2温度画像データと、第1温度画像データ及び第2画像データの各画像フレームを撮像した位置の情報とを用いて、第1温度画像データと第2温度画像データと位置の情報とに基づき、各第1温度画像データの画像フレームとそれに一部重複する第2温度画像データの画像フレームとを対応付ける。また、対応付けられた第1温度画像データの各画像フレームの温度値のピークの位置と、対応付けられた第2温度画像データの各画像フレームの温度値のピークの位置とを検出するとともに、温度値のピークが被撮像物の座標上で一致する場合に、一致したピークの位置を変状位置として検出する。
(もっと読む)
パンタグラフ監視装置
【課題】列車の屋根上を撮影した画像を解析して、パンタグラフの舟体又はこの舟体に設置されているすり板の折れの有無を検出することを可能としたパンタグラフ監視装置を提供する。
【解決手段】列車の屋根上を撮影する監視カメラと、監視カメラによって撮影された検査パンタグラフ画像を画像処理することによりパンタグラフの状態を監視する画像処理部とを備えたパンタグラフ監視装置において、画像処理部が、検査パンタグラフ画像中に撮影されているパンタグラフに対して直線を抽出する処理を行う直線抽出部5gと、抽出した直線の状態に基づいてパンタグラフの舟体もしくはすり板又はその両方の折れの有無を判断する折れ判断部5hとを備えるパンタグラフ舟体形状検査部5Cを有する構成とした。
(もっと読む)
パンタグラフ監視装置
【課題】列車の屋根上を撮影した画像を解析して、パンタグラフの舟体に設置されているすり板の欠けや抉れの有無を検出することを可能としたパンタグラフ監視装置を提供する。
【解決手段】列車の屋根上を撮影する監視カメラと、監視カメラによって撮影された検査パンタグラフ画像を画像処理することによりパンタグラフの状態を監視する画像処理装置とを備えたパンタグラフ監視装置において、画像処理部が、予め設定される基準画像上のパンタグラフの舟体の画像と前記入力画像上のパンタグラフ舟体の画像とを比較する検査小領域画像比較部5h、及び、比較結果に基づいてパンタグラフ舟体の欠けや抉れの有無を判断する比較判断部5iを有するパンタグラフ状態検査処理手段を備える構成とした。
(もっと読む)
位置姿勢計測装置、位置姿勢計測方法、及びプログラム
【課題】距離画像の欠損領域(無効領域)を特徴として利用した、対象物体の3次元位置姿勢の推定を可能にすることを目的とする。
【解決手段】3次元形状が既知である対象物体の3次元の位置姿勢を計測する位置姿勢計測装置であって、対象物体までの距離情報が画素値として保持された距離画像を撮像する撮像部と、距離画像から、撮像部と対象物体との距離情報が取得できない領域である無効領域を選別する選別部と、無効領域の特徴を示す特徴量を抽出する抽出部と、距離画像を撮像した時の撮像部と対象物体との相対的な位置姿勢を示す情報と、撮像部により複数の異なる方向から撮像された距離画像ごとの特徴量とを関連付けて記憶する記憶部と、抽出部により抽出された特徴量に対応する記憶部に記憶された特徴量を求めて、当該求められた特徴量と関連付けられた位置姿勢を示す情報から対象物体の3次元の概略位置姿勢を決定するする概略位置姿勢決定部と、を備える。
(もっと読む)
多開口画像データの処理
多開口画像データを処理する方法およびシステムが記載され、この方法は、少なくとも第1の開口を使用して電磁スペクトルの少なくとも第1の部分に関連するスペクトルエネルギーに、また少なくとも第2の開口を使用して電磁スペクトルの少なくとも第2の部分に関連するスペクトルエネルギーに、撮像システム内の画像センサを同時に露出させることによって、1つまたは複数の物体に関連する画像データを取り込むステップと、電磁スペクトルの前記第1の部分に関連する第1の画像データおよび電磁スペクトルの前記第2の部分に関連する第2の画像データを生成するステップと、前記第1の画像データの少なくとも1つの領域内の第1のシャープネス情報および前記第2の画像データの少なくとも1つの領域内の第2のシャープネス情報に基づいて、前記取り込まれた画像に関連する深さ情報を生成するステップとを含む。 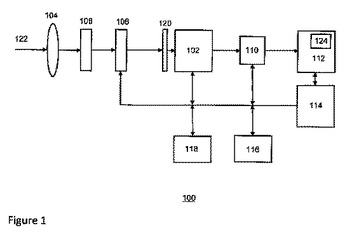 (もっと読む)
(もっと読む)
画像処理装置、画像処理方法、およびコンピュータが実行可能なプログラム
【課題】本発明は、読取媒体を光学的に読み取って得られた読取画像の折目線を高精度に検出することが可能な画像処理装置、画像処理方法、およびコンピュータが実行可能なプログラムを提供することを目的とする。
【解決手段】検出部14は、読取媒体の第1面および第2面の読取画像の折目線をそれぞれ検出し、補正部15は、第1面の読取画像の折目線検出結果と第2面の読取画像の折目線検出結果とを折目線の幾何学的な特徴を利用して比較し、第1面および第2面の読取画像の折目線検出結果を補正する。
(もっと読む)
画像処理方法、画像処理装置、画像処理プログラムおよび記録媒体
【課題】 検査対象物のタイヤ内側が撮影された画像から欠陥と刻印文字とを判別することができる画像処理方法、画像処理装置、画像処理プログラムおよび記録媒体を提供する。
【解決手段】 テンプレート領域設定工程a2では、判別対象が含まれる位置にテンプレート領域を設定する。自己相関値算出工程a3では、自己相関値を算出し、差分処理工程a4では、相関差分値を算出する。極大位置検出工程a5では、相関差分値の極大位置を検出する。偏差値算出工程a6では、極大位置の間隔を算出し、極大位置の間隔の偏差値を算出する。線状模様数算出工程a10では、画像中のブラダーグルーブの合計数を算出する。判定工程a7,a8,a11,a13では、極大位置の間隔の偏差値とブラダーグルーブの合計数とに基づいて、判別対象が刻印文字および欠陥のうちのいずれであるかの判定を行う。
(もっと読む)
デジタルカメラを用いた三次元計測方法に用いるカメラのカメラパラメータの算定用データのための指標点配置方法、三次元座標値測定方法、カメラパラメータの算定方法、並びに、デジタルカメラを用いた三次元計測方法及び該三次元計測方法における基準軸鉛直設定装置
【課題】デジタルカメラを用いた三次元計測方法を実現し提供する。
【解決手段】カメラパラメータが設定されたデジタルカメラCを用いて第1の撮影地点と、第2の撮影地点とで撮影対象を共通に含む複数の写真を撮影し、5個以上の固定点における写真上の位置とその間に実測距離から1組の写真上の座標を共通の座標系に座標変換を行うためのパラメータを算出し、これによって双方の写真内にある対象点の、第1の撮影地点を原点とする三次元座標系における位置を計測し、三次元座標系を客観的な座標系に変換して対象点の客観的な座標系における位置を計測するデジタルカメラを用いた三次元計測方法であって、鉛直性が確保される鉛直尺22と、この鉛直尺22とは別の位置に任意に配置した計測指標点Pxとを撮影対象に含め、写真に撮影される前記鉛直尺22、計測指標点Pxを基に客観的な座標系を定める過程を含む構成とする。
(もっと読む)
画像位置推定装置、電子透かし検出装置及び方法並びにプログラム
【課題】複製前の画像と複製後の画像との位置合わせの精度を向上させることができる画像位置推定装置、複製前後の画像で推定された位置関係を基に電子透かし情報を検出する電子透かし検出装置及びこれらの方法並びにこれらの装置としてコンピュータを機能させるためのプログラムを提供する。
【解決手段】境界線推定部2が、複製画像を画像解析して、複製画像で元画像に含まれる画像領域と元画像に含まれない画像領域との境界線を推定し、位置推定方式選択部3が、複製画像でとり得る境界線の位置関係を選択基準として、元画像の辺と複製画像の辺又は境界線との間で推定される対応関係がそれぞれ規定された複数の位置推定方式を有し、境界線推定部2によって複製画像から推定された境界線の位置関係を解析した結果に基づいて、複数の位置推定方式のうちから、当該複製画像に対応した位置推定方式を選択する。
(もっと読む)
画像検査方法および画像検査装置
【課題】マニュアルでの補正や多大な処理時間を必要とせず、ビデオ撮影装置の位置およびビデオ撮影装置の位置と撮影対象物までの距離から求められる撮影している画角の座標を、撮影画像のフレームと同期させてビデオ撮影装置の記録チャンネルに記録する。
【解決手段】走行する車両からビデオ撮影装置でコンクリート構造物の表面劣化を検査する方法において、ビデオ撮影装置の位置およびビデオ撮影装置の位置と撮影対象物までの距離から求められる撮影している画角の座標を、撮影画像のフレームと同期させてビデオ撮影装置の記録チャンネルに記録する。
(もっと読む)
3次元デジタイザ
【課題】連続性のある実画像に3次元情報を持たせ、仮想空間の任意の視点から実画像に含まれる物体を見ることが可能な画像データを生成する3次元デジタイザを提供する。
【解決手段】撮像手段2はカラー画像を撮像し、距離画像生成手段1は撮像手段2と重複する視野を持ち距離画像を生成する。撮像位置計測手段4は、撮像手段2および距離画像生成手段1による撮像位置と撮像方向とを計測する。座標変換手段3は、距離画像に規定した装置座標を位置計測手段4により計測した撮像位置および撮像方向を用いて実空間に規定されている3次元の実空間座標に変換する。座標変換手段3で得られた物体の実空間座標を用いることにより、仮想空間形成手段5では、物体のモデリングを行い仮想空間を形成する。さらに、外観形成手段6は、仮想空間に配置した物体に撮像手段で撮像した物体の外観をテクスチャとしてマッピングを行う。
(もっと読む)
81 - 100 / 569
[ Back to top ]