
Fターム[5B057DC03]の内容
Fターム[5B057DC03]に分類される特許
201 - 220 / 1,739
エッジ位置検出装置、パターン測定装置、エッジ位置検出方法およびパターン測定方法
【課題】パターン要素のエッジ位置を再現性よく求める。
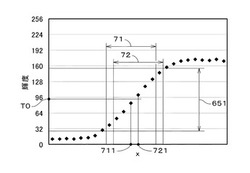
【解決手段】パターン測定装置では、対象物上のパターン要素を示す画像において当該パターン要素の一のエッジに交差するx方向における輝度プロファイルが取得される。続いて、輝度プロファイルにおいてエッジを示す傾斜部に含まれる複数の画素位置のうち、x方向に連続するとともに当該複数の画素位置よりも少ない画素位置を対象位置群として、複数通りの対象位置群71,72を決定し、各対象位置群71,72に含まれる画素位置における輝度プロファイルの輝度から高次の近似式が求められる。そして、複数通りの対象位置群71,72にそれぞれ対応する複数の近似式において、所定のエッジ輝度T0となる傾斜部内の位置を複数のエッジ候補位置として取得し、複数のエッジ候補位置に基づいて最終的なエッジ位置が求められる。これにより、パターン要素のエッジ位置を再現性よく求めることができる。
(もっと読む)
顔メーキャップ適用機械及びそれを用いたメーキャップ適用方法

【課題】手動のメーキャップを施す方法における、及びメーキャップの試行用の色シミュレーション装置における問題を緩和する及び/又は除去するための改良された方法及び装置を提供すること。
【解決手段】ベース1、ロボット2、化粧品供給器具3、及び制御装置4を含む顔メーキャップ適用機械が提供され、制御装置4は、人間の顔に対応する輪郭に化粧材料を噴霧又は塗布するために、化粧品供給器具3をメーキャップ適用位置に動かすようにロボット2を制御することができる。使用者によって選択された又は模倣された顔へのメーキャップ適用を、色々とかつ正確に実行するための自動的なメーキャップの適用を提供するとともに、個別の顔イメージは内蔵することができ、又は外部の保存装置44又はイメ−ジ認識装置によって提供することができる。保存装置44は複数のメーキャップ適用プロファイルを選択肢として事前に保存することができる。
(もっと読む)
人物検出装置、人物検出方法及びプログラム
【課題】人物検出装置、人物検出方法及びプログラムにおいて、人物の移動時及び静止時にかかわらず脚の特徴を抽出して人物を正確、且つ、比較的簡単に検出することを目的とする。
【解決手段】重力方向と略垂直な平面で走査範囲を走査して基準位置から走査範囲内の対象物までの距離を測定してレンジデータを出力する走査部と、レンジデータを所定周期でサンプリングしてセグメントを形成し、セグメントに基づいて脚の特徴を抽出する抽出部と、抽出した特徴の運動特性及び幾何情報に基づいて人物を検出する検出部を備え、抽出部は、最短距離近傍法を用いて取得した2つのセグメントペアの移動特性に基づいて、各セグメントペアが静止している静止セグメントを分類する静止特徴強分類器と、各セグメントペアが移動している移動セグメントを分類する移動特徴強分類器を含み、分類されたセグメントの特徴に基づいて2つのセグメントペアから脚ペアを抽出するように構成する。
(もっと読む)
線幅算出装置と算出方法並びに算出プログラム
【課題】被写体の表面に現れている線の幅を短時間に精度よく算出可能な線幅算出装置と算出方法並びに算出プログラムを得る。
【解決手段】記憶手段には、画像データに含まれる画素の大きさと被写体の表面上の大きさとの換算値が記憶されていて、画像処理手段は、画像データに含まれる画素ごとの輝度値を算出する輝度値算出手段と、画像データに含まれる画素ごとに算出された輝度値と所定の基準値とを比較し、比較の結果に基づいて画像データに含まれる画素の中から線が撮像されている可能性の高い線画素を特定する線画素特定手段と、画像データに含まれる画素のうち特定された線画素の周辺に位置する周辺画素を特定する周辺画素特定手段と、特定された周辺画素ごとに線境界を特定する線境界特定手段と、特定された線境界と換算値とに基づいて線幅を算出する線幅算出手段とを有してなる。
(もっと読む)
分類のための特徴量選出方法、画像の分類方法、外観検査方法および外観検査装置
【課題】特徴量に基づく分類技術において、分類に有効な特徴量のみを効率よく、かつばらつきなく選出し、こうして選出された有効特徴量を使用することにより、短い処理時間で安定した分類結果を得ることを可能とする技術を提供する。
【解決手段】画像を特徴付けるm個の特徴量を算出し、学習アルゴリズムを用いて各特徴量の有効度Wを求める。有効度Wを降順に並べ、値の大きいものから累積加算してゆく。第n番目の特徴量までの有効度Wの累積値Σwが、m個の特徴量の有効度の総和Swの50%であるとき、当該n個の特徴量を有効特徴量とする。
(もっと読む)
瞳孔検出装置及び瞳孔検出方法
【課題】検出対象画像が低解像度であっても瞳孔検出精度を向上することができる瞳孔検出装置及び瞳孔検出方法を提供すること。
【解決手段】瞳孔検出装置100において、目領域実寸算出部102が、目領域の実スケール値を取得し、瞳孔状態予測部103が、瞳孔径の実スケール予測値を算出し、必要解像度推定部105が、算出された実スケール予測値に基づいて、解像度のターゲット値を算出し、目領域画像正規化部107が、算出された解像度のターゲット値及び目領域の実スケール値に基づいて、拡大/縮小倍率を算出し、算出された拡大/縮小倍率に基づいて目領域の画像を正規化し、瞳孔検出部108が、正規化された目領域の画像から瞳孔画像を検出する。
(もっと読む)
AR処理装置、AR処理方法及びプログラム
【課題】手間がかからずに、カメラの位置姿勢を精度よく推定できるAR処理装置を提供する。
【解決手段】生成部12は、同一被写体について取得されたペア画像に基づいて、被写体の3Dモデルを生成する。抽出部13は、被合成3Dモデルから複数の第1特徴点を抽出すると共に、合成3Dモデルから複数の第2特徴点を抽出する。取得部14は、複数の第1特徴点と複数の第2特徴点とに基づいて、座標変換パラメータを取得する。変換部15は、この座標変換パラメータを用いて、合成3Dモデルの座標を被合成3Dモデルの座標系の座標に変換する。合成部16は、変換された全ての合成3Dモデルを被合成3Dモデルに合成すると共に、特徴点の統合を行う。保存部17は、合成された被写体の3Dモデルと、統合された特徴点に関する情報をメモリカード等に保存する。ここで保存されたデータは、AR処理で使用される。
(もっと読む)
立体画像表示制御装置ならびにその動作制御方法およびその動作制御プログラム
【課題】画像合成領域に余白が生じないようにする。
【解決手段】ユーザが視差量を設定する(ステップ72)。画像合成領域に立体画像が表示される(ステップ74)。立体画像が,設定された視差量となるように調整される(ステップ75)。視差量が調整されたことにより,画像合成領域内に余白ができたかどうかが判定される(ステップ76)。余白ができると(ステップ76でNO),余白ができない範囲まで立体画像が拡大される(ステップ77)。
(もっと読む)
車両用対象物認識装置
【課題】より適切な範囲に設定された領域で対象物の認識を行うことが可能な車両用対象物認識装置を提供すること。
【解決手段】自車両前方を撮像する撮像手段により撮像された画像における所定領域に存在する路面上の認識対象物を認識する画像解析手段と、自車両の直前を走行する先行車両との車間距離を取得する車間距離取得手段と、自車両のピッチ角を取得するピッチ角取得手段と、を備え、画像解析手段は、車間距離取得手段により取得された車間距離及びピッチ角取得手段により取得された自車両のピッチ角に基づいて、先行車両の後下端部に対応する画像上の縦方向座標を有し画像横方向に延在する除去ラインを設定し、設定した除去ラインよりも遠方側の領域を所定領域から除外して認識対象物を認識することを特徴とする車両用対象物認識装置。
(もっと読む)
画像処理プログラムおよび画像処理装置
【課題】顔を撮影した画像内から、顔部品の特徴点を誤って検出してしまう可能性を低減させることを課題とする。
【解決手段】画像処理装置は、顔を撮影した画像を入力し、該入力した画像内に含まれる顔の特徴点の候補を複数抽出して、該複数抽出した顔の特徴点の候補が該特徴点である尤もらしさを示す尤度値を取得する。続いて、画像処理装置は、候補として抽出された特徴点間の距離を評価するための参照値と尤度値とに基づいて、複数抽出した顔の特徴点の候補間の距離を評価する。そして、画像処理装置は、特徴点の候補間の距離に関する評価の結果に応じて画像から特徴点を検出する。
(もっと読む)
画像表示システム、画像処理装置、および、画像表示方法
【課題】車両の駐車の際にステアリングホイールの操作が必要なタイミングをユーザへ報知する技術を提供する。
【解決手段】ユーザの操作に基づいて俯瞰画像中に車両9が駐車すべき駐車領域SA41を設定すると、駐車領域SA41の位置に相対的に設定される。ユーザがステアリングホイール91を操作すべき位置を示す第1操作ポイントP11及び第2操作ポイントP12と、車両9に相対的に設定された第1基準マークM21及び第2基準マークM22とが俯瞰画像中に表示される。車両9の移動により第1操作ポイントP11及び第2操作ポイントP12と、第1基準マークM21及び第2基準マークM22とが接触した場合に、ステアリングホイール91の操作が必要であることをユーザへ報知する。これにより、ユーザは車両9を駐車する際にステアリングホイール91の操作が必要なタイミングを的確に把握できる。
(もっと読む)
車線推定装置
【課題】撮像手段で撮像した画像から、左右の走行車線の位置を推定する。
【解決手段】固定データメモリ9dには走行車線21L,21R間の標準レーン幅W1、二重白線の内側誘導線22間の狭レーン幅W2のデータが記憶されている。車線候補点設定部9aは撮像手段1で撮像した画像に基づいて走行レーンの左右の車線検出点Pを検出し、この車線検出点Pを起点として対向する車線側の各レーン幅W1,W2の位置と両レーン幅W1,W2間の位置に車線候補点G1〜G3を設定する。曲線近似処理部9bは車線検出点Pと車線候補点G1〜G3とに基づき求めた曲線近似式から走行レーンの左右に仮想線Lsを設定する。車線位置設定部9cは左右の仮想線Lsに対する各車線候補点G1〜G3の分散を求め、最小の分散を示す仮想線Lsに対応する車線種により左右の少なくとも一方の仮想線Lsの車線種を推定し、この車線種を基準に走行車線位置を確定する。
(もっと読む)
撮影対象サイズ推定装置及び撮影対象サイズ推定方法並びにそのプログラム
【課題】撮影画像に写っている撮影対象のサイズを簡易な方法で推定することのできる撮影対象サイズ推定装置を提供する。
【解決手段】撮影画像に写っている撮影対象の所望の算出対象サイズを表す算出対象画素の前記撮影画像内において占める画素数を検出する。また、撮影画像内において算出対象画素が占める画素数の代表値により、撮影対象の実空間上での算出対象サイズの代表値を除して、撮影画像内の1画素の実空間上におけるサイズの代表値を算出し、その値に、撮影対象の算出対象画素が撮影画像内において占める画素数を乗じることにより、撮影画像内に写っている撮影対象における算出対象サイズの実空間上のサイズを算出する。
(もっと読む)
校正装置、距離計測システム、校正方法および校正プログラム
【課題】 ステレオカメラの経時的な位置ずれを補正し校正できる装置や方法を提供する。
【解決手段】 この校正装置は、移動体に搭載され、カメラ位置に関するパラメータを校正する装置であり、2地点において一方のカメラで撮影した2つの基準画像と、他方のカメラで撮影した2つの対応画像と2つの基準画像とを用い、各地点につき基準画像と対応画像の中の共通する複数の特徴点の位置から算出された複数の視差データとの入力を受け付ける画像取得部300と、2つの基準画像の中の共通する複数の特徴点を探索する特徴点探索部310と、探索された各特徴点につき、2つの基準画像の各特徴点における視差データから、視差とその視差に対応する視差変化量とをそれぞれ算出する視差計算部320と、算出された複数の視差および視差変化量から、カメラ位置に関するパラメータの補正値を算出する補正値計算部330とを含む。
(もっと読む)
遮断桿折損判定支援システム、遮断桿折損判定装置及び遮断桿折損判定支援方法
【課題】踏切遮断機の遮断桿の折損判定を、簡易な構成で実現すること。
【解決手段】遮断桿折損判定支援システム1は、(A)列車10に搭載される撮影装置30と、(B)踏切遮断機20に設けられた発信器40と、(C)撮影装置30による撮像画像に基づく遮断桿の折損判定を行う判定装置50とを備えて構成される。撮影装置30は、列車10が踏切遮断機20の近傍を通過する際にこの踏切遮断機20を撮影し、撮影データとして蓄積記憶する。そして、一日の営業運転の終了後、撮影装置30に蓄積記憶された撮影データが判定装置50に入力され、判定装置50では、撮影装置30から取り込んだ撮影データをもとに、列車10が走行した路線に設置されている踏切遮断機20の遮断桿の折損を判定する。
(もっと読む)
画像処理装置及びプログラム
【課題】線種の異なる線が直線状に連続する場合に、そのうちのいずれかの線種の線を構成する要素どうしを統合すること。
【解決手段】登録部105は、第1抽出部103及び第2抽出部104がそれぞれ抽出した第1要素及び第2要素を線の候補として登録する。統合部106は、注目する候補と、それに連続し、かつ、統合条件を満たす候補とを統合して線とする。第1算出部107は、統合された線の全部又は一部の特徴量を算出する。第2算出部108は、算出された特徴量から線種に特有な特徴量との類似度を算出する。補正部110は、算出された類似度に基づいて、統合条件を補正する。除外部111は、算出された類似度に基づいて、登録されている候補を除外する。統合部106は、統合した線を注目する候補とし、この候補と、この候補に連続し、かつ、補正された統合条件を満たす候補とを統合して線とする。
(もっと読む)
画像処理装置、画像形成装置、画像処理方法及び濃度調整制御プログラム
【課題】同一画像が連続する場合であってもページ毎の印刷位置のずれを発生させることなく、発光素子の負荷を軽減させ、ラインヘッドの劣化を防ぐ。
【解決手段】LEDAヘッドを用い、画像データに対応する発光素子を発光させて露光し、像担持体上に形成される潜像を顕像化して画像を形成する際に所定の画像処理を行う画像処理装置において、前記画像データ64の中から副走査方向に伸びる線状画像60を検出し、検出した線状画像60を露光する発光素子の発光エネルギが小さくなるよう画像の濃度を濃度調整処理65で調整する。その際、濃度調整処理65では、調整前の濃度に対する調整後の濃度の比率を設定したフィルタ66によって調整後の画素の濃度を設定する。
(もっと読む)
車載カメラを用いた測距装置
【課題】単一の車載カメラによって取得される撮像画像を基に、車両の外部の移動体と自車両との間の距離を測定することできる測距装置を提供する。
【解決手段】車載カメラ2により異なる時刻で取得された第1撮像画像と第2撮像画像のうちの第1撮像画像において、移動体Mの路面に対する接地点Pに対応する画像上移動体接地点P1を特定し、車両との間の距離が移動体Mの接地点Pと同一の距離となる静止点Qに対応する第1撮像画像上の点Q1と第2撮像画像上点Q2とを第1撮像画像及び第2撮像画像から抽出する。抽出した点Q1,Q2を用いて、モーションステレオの手法によって、静止点Qと車両との間の距離と算出し、算出した距離を移動体Mと車両との間の距離として決定する。
(もっと読む)
映像監視装置
【課題】簡単な装置構成により映像データのうちから監視に必要な部分のみを抽出して短時間で監視作業を遂行することができる映像監視装置を提供する。
【解決手段】監視カメラによって継続して撮像して得られる映像データをフレーム単位に記憶し、動体を含むフレームを当該映像データから抽出する機能を有し、監視に必要な映像を素早く検出することを可能にした映像監視装置。
(もっと読む)
対応付け装置
【課題】画像情報と地図情報との対応付けを正確に行うことができる対応付け装置を提供する。
【解決手段】画像が入力される画像入力部101と、地図が入力される地図入力部102と、前記画像上の点と前記地図上の点との対応関係を示す対応点情報を入力する対応入力部103と、前記対応点情報に基づいて、前記画像の分割領域毎に変換パラメータを算出する算出部105と、前記分割領域毎の前記変換パラメータを用いて、前記画像上の所定の位置を前記地図上の位置に変換する変換部107とを有する。
(もっと読む)
201 - 220 / 1,739
[ Back to top ]