
Fターム[5B057DC03]の内容
Fターム[5B057DC03]に分類される特許
21 - 40 / 1,739
不動産物件情報提供支援装置
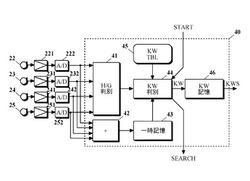
【課題】ゲスト及びホストの音声に基づき、ゲストに提供しようとする不動産物件情報をより正確に検索できるようにする。
【解決手段】H/G判別部41は、異なる位置に着座するホストとゲストの音声を、集音方向を調整自在な指向性マイク22〜25による検出音の強度に基づき識別する。キーワードテーブル45には、質問キーワードと1つ以上の質問キーワードで分類される質問の種類毎の回答キーワードとが登録されている。キーワード判別部44は、識別されたホストの音声に、登録された質問キーワードのどれが含まれているか及び該質問キーワードに基づく質問の種類を判別し、識別されたゲストの音声に、直近の質問の種類に対応した、登録された回答キーワードのどれが含まれているかを判別し、判別した回答キーワードを該質問の種類と対応させて検索用キーワード記憶部46に記憶させる。
(もっと読む)
障害物検出装置及びプログラム

【課題】簡易な構成で、前方に存在する障害物を精度よく検出することができるようにする。
【解決手段】前照灯投光装置によって、光が照射される照射領域の上端部であるカットライン境界部分の明度が変化するように前方を照射する。撮像装置12によって、自車両の前方を撮像する。カットライン検出部20によって、撮像された画像から、高さ方向の輝度変化に基づいて、カットライン境界部分のエッジ対を検出する。障害物検出部22によって、検出されたカットライン境界部分のエッジ対の高さ方向の幅に基づいて、自車両の前方に存在する障害物を検出する。
(もっと読む)
物品の3次元位置姿勢の認識装置及び認識方法
【課題】製造現場で使われる汎用的な組み込み装置でも実施できるような、少ない計算コストで物品の3次元位置姿勢を認識できる認識装置及び認識方法の提供。
【解決手段】カメラ20で複数の物品22がバラ積みされた領域全体の2次元画像を取得し、レンジセンサ18でカメラ20と略同じ領域の3次元情報を取得する。取得した3次元情報から、取り出すべき物品が存在するであろう空間を対象空間として大まかに限定し、該対象空間に基づいて2次元画像処理で物品を探索するための探索条件を設定し、該探索条件に基づいて物品の画像上での2次元位置情報を取得する。次に該2次元位置情報を用いて、物品の3次元位置姿勢の認識に使用する3次元点データを選定し、カメラ20の焦点から該物品に向かう3次元空間上の視線を計算し、該3次元点データと視線とに基づいて物品の3次元の位置姿勢を計算する。
(もっと読む)
画像処理装置、画像処理方法およびプログラム
【課題】撮像画像に映る物体の実空間上のサイズに基づいて、撮像画像に合成される仮想オブジェクトを決定する。
【解決手段】撮像画像131に仮想オブジェクトを合成する画像処理部を備え、画像処理部は、撮像画像に映る物体の実空間上のサイズに基づいて前記仮想オブジェクトを決定し、ユーザに提供できる衣装のサイズをあらかじめ登録しておくことにより、登録した衣装のサイズとユーザの実空間上のサイズとに基づいて、適切なサイズの衣装をユーザに提案することができる画像処理装置100を提供する。
(もっと読む)
固定部材検出ユニット、固定部材解体システム、固定部材解体方法、およびプログラム
【課題】解体対象を固定している固定部材の位置の検出精度を高めること。
【解決手段】解体対象を撮像した撮像画像から、前記解体対象を固定している固定部材の画像として予め決められている固定部材画像を検出する固定部材画像検出部と、前記固定部材画像検出部により検出された前記固定部材画像の位置を示す位置情報を算出する位置情報取得部と、前記解体対象を固定している複数の前記固定部材の予め決められた位置関係を示す配置パターンと前記位置情報とに基づき、前記固定部材画像検出部によって検出された前記固定部材画像が前記配置パターンに含まれる前記複数の固定部材に対応するか否かを判定する配置パターン対応確認部と、を備える。
(もっと読む)
到達時間推定装置、到達時間推定方法、到達時間推定プログラム、及び情報提示装置
【課題】到達時間をより確実に推定することができる到達時間推定装置、到達時間推定方法、到達時間推定プログラム及び情報提示装置を提供する。
【解決手段】画像入力部は、画像信号をフレーム毎に入力し、物体検知部は、画像入力部から入力された画像信号が表す物体を検知し、到達時間算出部は、物体検知部が検知した物体までの方向を表す方向ベクトルに基づいて前記画像信号を撮影した撮影装置の光軸の回転を表す回転行列を算出し、過去の方向ベクトルに前記算出した回転行列を乗じたベクトルと、現在の方向ベクトルとに基づいて前記物体までの距離の変化を算出し、算出した距離の変化に基づいて当該物体までの到達時間を算出する。
(もっと読む)
シミ分類方法、シミ分類装置およびシミ分類プログラム
【課題】シミを高精度に分類することができるシミ分類方法を提供する。
【解決手段】被験者の皮膚を撮影して得られた画像の色空間を変換した色空間変換画像を生成し、色空間変換画像に含まれるシミを検出し、検出されたシミについて、形態特徴量および色特徴量を算出し、算出された形態特徴量および色特徴量に基づいて、機械学習法によりシミを分類する。
(もっと読む)
車両周辺監視装置
【課題】単一の撮像装置で撮像した場合であっても、カーブミラーを歩行者と誤検知する可能性を軽減することができる車両周辺監視装置を提供する。
【解決手段】カーブミラー判定部104は、撮像画像から略円形の物体又は略四角形の物体をカーブミラー可能性物体、すなわち人体の頭部候補及びミラー本体候補として抽出するカーブミラー可能性物体抽出部104aと、抽出された前記カーブミラー可能性物体の近傍に支柱形状の物体の有無を検知する支柱形状物体検知部104bと、を有し、抽出された前記カーブミラー可能性物体の近傍に前記支柱形状の物体が検知された場合、前記カーブミラー可能性物体を前記カーブミラーであると決定する。
(もっと読む)
表面検査方法
【課題】車両用部品の表面検査において、検査時間の短縮と検査精度の向上を図る。
【解決手段】車両用部品20の表面に設定される第1領域を1つの画素で検出する第1画像取得手段によって取得する第1画像取得工程と、取得した第1画像の第1領域の欠陥強度が所定の閾値以上の場合に第1領域を各欠陥検出領域351と設定する欠陥領域設定工程と、第2領域41−49を1の画素で検出する第2画像検出手段によって欠陥検出領域351と欠陥検出領域351の周辺を含む欠陥判定領域40の複数の第2領域41−49の画像を取得する第2画像取得工程と、各第2領域の欠陥強度が所定の閾値以上と判定された各第2領域41−49の欠陥強度の平均値を計算し、平均値が欠陥強度の所定の閾値以上である場合、その車両用部品は欠陥品であると判断する欠陥品判断工程と、を有する。
(もっと読む)
シミ検出方法、シミ検出装置およびシミ検出プログラム、並びに、シミ分類方法、シミ分類装置およびシミ分類プログラム
【課題】シミの検出を高速度に行うことができるシミ検出方法を提供する。
【解決手段】被験者の所定の皮膚領域を撮影して得られた撮影画像の色空間を変換すると共に変換された撮影画像の色空間のうち所定の色空間成分からなる色空間成分画像を生成し、色空間成分画像を多重解像度処理することにより、解像度の異なる複数の色空間成分解像度変換画像を生成し、生成された複数の色空間成分解像度変換画像をそれぞれ2値化処理することにより、所定の皮膚領域内に存在するシミを検出する。
(もっと読む)
輸送シミュレーションシステム、輸送シミュレーション方法、及びプログラム
【課題】ルートサーベイの時間及びコストを低減し、精度を改善する。
【解決手段】輸送ルートの道路環境を表す画像データを取得する画像データ取得手段と、画像データに基づいて、道路環境の長さ、幅、及び高さを表す3次元道路パラメータを生成し、これに基づいて、道路環境を表す3次元道路データ生成手段と、輸送対象機器の長さ、幅、及び高さを表す3次元機器パラメータと、輸送対象機器の3次元機器画像データと、を含む3次元機器データ生成手段と、輸送対象機器を積載した輸送車両が、輸送ルートを走行するときの道路環境を仮想的に再現する輸送モデルを計算する輸送モデル計算手段と、3次元道路データ及び3次元機器データに基づいて、輸送ルート上の干渉物と輸送対象機器との間の干渉距離を計算する干渉距離計算手段と、干渉距離に基づいて、輸送対象機器を輸送できるか否かを判定する輸送可否判定手段と、判定結果を出力する出力手段と、を備える。
(もっと読む)
距離推定装置
【課題】自車から障害物までの距離推定の精度向上を図る。
【解決手段】ビデオカメラ11で捕えた画像より建物等の障害物の法線ベクトルを垂直成分抽出部13で抽出し、抽出された法線ベクトルに基づき、傾斜路判定部15で傾斜路かの判定と傾斜路の場合の傾斜角を算出する。予めカメラ11で捕えた画像から基準法線ベクトルを抽出するとともに、画像の画素毎と自車との距離データをメモリ10に保存しておく。自車と障害物まで平坦路と傾斜路があった場合に、平坦路と傾斜路の境界と障害物までの距離を傾斜角に基づき補正するようにして自車から障害物までの距離推定の精度を向上した。
(もっと読む)
車線監視システム及び車線監視方法
【課題】走行中の車線がカーブしている車線であるか否かの判定や、カーブしている車線境界線の認識を、簡易な構成において実現できる「車線監視システム及び車線監視方法」を提供する。
【解決手段】後方カメラ1で撮影した自動車後方の画像フレーム中の白線上の各位置における白線の方向の垂線の傾きを用いて、後方の白線を近似する円の半径を、車線の曲率半径rを算出し、曲率半径rが所定値より大きい場合には、走行中の車線がカーブしている車線であると判定し、白線を円で近似し、他の場合には、走行中の車線が直進している車線であると判定し、白線を直線で近似する。
(もっと読む)
カラーフィルタ基板の欠陥検査方法
【課題】従来の標高計算は局所領域のミスマッチングによる誤差が生じ、精度の高い標高情報が得られず、多大な処理時間がかかるという問題点がある。
【解決手段】カラーフィルタ基板上の局所領域の標高をステレオ方式で算出し欠陥判定をする欠陥検査方法において、ステレオ画像の一方の撮像画像である基本画像から局所領域を検出する工程、ステレオ画像の他方の撮像画像であって局所領域を含む参照画像を取得する工程、局所領域を含むマッチング領域をステレオ画像から選定する工程、マッチング領域から基準マークとなる部位を選定する工程、局所領域を鮮明化する工程、鮮明化された局所領域の中心座標を求め、基準マークからの距離を算出する工程、基本画像と参照画像における局所領域間の視差を求める工程、局所領域の標高を算出する工程、とを含むことを特徴とするカラーフィルタ基板の欠陥検査方法。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】画像の領域の大きさを使用者の操作精度によらず容易かつ均一に得ることが可能な画像処理装置および画像処理プログラムを提供する。
【解決手段】画像データに基づく初期画像IMにおいて抽出される領域A4が表示部260の画像表示領域261に表示される。表示された領域A4に外接する外接矩形Pが作成される。作成された外接矩形Pが表示部260の画像表示領域261に表示されるとともに、作成された外接矩形Pの予め定められた部分の寸法または面積を示す特徴量が算出される。使用者は、入力装置を用いて表示部260の画像表示領域261に表示された外接図形Pを回転させることができる。
(もっと読む)
三次元測定対象物の形態調査方法
【課題】レーザー走査装置により三次元測定対象物の形態を正しく測量し、調査する。
【解決手段】三次元測定対象物の形態調査方法であって、レーザー走査装置が調査範囲にレーザーを照射したとき、該レーザーの多数の反射点の各点を、三次元座標化された点として取得し、前記調査範囲の水平面上に多数のグリッドを派生させ、各グリッドの中にある点群の鉛直座標分布から標高値の最も低い低位点を抽出し、各グリッドで抽出された低位点を用いて調査範囲の地形モデルを作成する。
(もっと読む)
顔印象判定チャート
【課題】被験者の顔形状を客観的かつ簡易に評価することを可能にする。
【解決手段】顔印象判定チャート10は、人の頭部形状に関する高次の基底ベクトルの少なくとも一つの重み係数が互いに異なる第一の頭部画像20および第二の頭部画像30が対比可能に配置されている。顔印象判定チャート10を参照して被験者の顔形状を目視観察することにより、被験者の顔に発現している基底ベクトルの次数とその発現度合いを定量的に把握することが可能である。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】所望の計測部分の幾何的な物理量を選択的にかつ容易に取得することが可能な画像処理装置および画像処理プログラムを提供する。
【解決手段】対象物画像データに基づいて対象物画像OIが表示されるとともに、指定画像データに基づいて対象物画像の特定部分に対応する計測部分指定画像AIが表示される。使用者による操作部の操作により、表示される計測部分指定画像AIが対象物画像OIに相対的に移動される。計測部分指定画像AIが対象物画像OIの特定部分に移動された場合、その特定部分に対応するように予め設定された計測対象物の計測部分の物理量が計測される。
(もっと読む)
三次元形状計測装置、三次元形状計測装置の制御方法、およびプログラム
【課題】対象物の奥行方向に対する計測精度の低下を抑制し、計測空間全域において良好な計測精度を得る。
【解決手段】計測空間への投影動作を実行する投影部と、投影動作が実行された計測空間中の対象物を撮影する撮影部と、撮影された画像に基づいて対象物の三次元形状を計測する計測部と、を備え、計測空間は、撮影部の撮影光学系のフォーカス位置の基準となる計測基準面を含み、且つ投影部の投影範囲と撮影部の撮影範囲とに基づいて規定されており、フォーカス位置は、撮影部から観察した場合に計測基準面の位置よりも奥に設定されている。
(もっと読む)
画像処理装置及び画像処理方法
【課題】適切に短時間でボケ修復を行うことのできる画像処理装置及び方法を提供する。
【解決手段】撮影レンズを介して入射した被写体光を光電変換する撮像部により得られた画像データに画像処理によってボケ修復を行う修復部と、撮影レンズに関する情報に基づいて修復部によるボケ修復が可能な被写体距離の範囲を設定する第1の設定部と、画像データの画像内の被写体距離の情報に基づいて、ボケ修復が可能な被写体距離の範囲よりも狭いボケ修復を行う被写体距離の範囲を設定する第2の設定部とを備え、修復部は、第2の設定部によって設定されたボケ修復を行う被写体距離の範囲において画像データのボケ修復を行う。
(もっと読む)
21 - 40 / 1,739
[ Back to top ]