
Fターム[5B057DC03]の内容
Fターム[5B057DC03]に分類される特許
101 - 120 / 1,739
画像表示装置
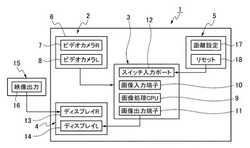
【課題】画像表示装置において、撮像手段から所定距離以上離れた対象物を隠す(マスキング)ことで、画像を視る者が距離感を得る。
【解決手段】画像表示装置1は、動画像を撮像する撮像手段2と、撮像手段2により動画像を撮像した位置と動画像を構成する各画像上の対象物との距離が所定距離以上離れた対象物をマスキングする画像処理手段3と、画像処理手段3で処理をした動画像を表示する画像表示手段4とを備える。前記撮像手段は、ステレオ撮像手段であり、前記画像処理手段は、前記ステレオ撮像手段により撮像したステレオ画像を構成する第1のモノラル画像を複数のエリアに分割し、この第1のモノラル画像の各エリアに対して、第2のモノラル画像上で前記第1のモノラル画像上と同―位置にエリアを設定して、第1のパターンマッチング値と第2のパターンマッチング値とに基づいて画像上の対象物との距離を判定する。
(もっと読む)
画像処理装置、画像処理方法

【課題】 監視カメラ等から得た映像を使用して画面内の特定箇所を物体や人体が通過したことを検知する場合において、画面端付近での誤検知を防止する為の技術を提供すること。
【解決手段】 表示画面内を移動するオブジェクトが、該表示画面内に設定されているオブジェクト検知用領域を通過したことを検知する画像処理装置100において、表示画面の枠部に上記検知を禁止する領域を設定する。そして、設定した領域以外で上記の検知を行う。
(もっと読む)
画像処理装置及びその制御方法
【課題】 監視対象オブジェクトの個数に上限値を設けながらも、オブジェクト数の個数が上限値以上になった場合であっても、監視対象オブジェクトを含まない特定領域が発生することを抑制する。
【解決手段】 撮像して得られた画像内を解析し、許容最大数Nmax以下の個数であって、予め設定された最小検知サイズ以上のサイズを持つオブジェクトを検出する(S102)。そして、認識されたオブジェクトの数が、許容最大数Nmax以上になった場合には前記最小検知サイズをより大きなサイズに変更する(S105)。また、認識されたオブジェクトの数が、目標最小数Nmin以下になった場合には最小検知サイズをより小さな値に変更する(S107)。
(もっと読む)
角膜反射判定プログラム、角膜反射判定装置および角膜反射判定方法
【課題】正確に角膜反射領域を判定すること。
【解決手段】角膜反射判定装置100は、画像データから目の領域を抽出し、画像データの目の領域から角膜反射領域の候補を検出する。角膜反射判定装置100は、複数の角膜反射領域の候補のうち、画像データの各フレームで断続的に抽出される角膜反射領域を判定する。これに対して、角膜反射判定装置100は、画像データの各フレームで連続して抽出される角膜反射領域の候補を、眼鏡のレンズ等による反射として除外する。
(もっと読む)
環境認識装置および環境認識方法
【課題】処理負荷を軽減すると共にメモリの記憶領域を低減することで、対象物の特定効率の向上を図る。
【解決手段】環境認識装置130は、特定物の形状に関する情報である形状情報を予め保持しておき、検出領域内を分割した複数の対象部位の輝度を取得して、エッジを有する対象部位を抽出し、エッジを有する対象部位の相対距離を取得し、相対距離に応じた形状情報に基づいてエッジを有する対象部位にハフ変換を施し、形状情報で示される特定物を決定する。
(もっと読む)
位置検知システム、それを用いた移動体、位置検知方法およびそのためのプログラム
【課題】センサの計測範囲に特徴的な被写体が存在していない場合や、そのセンサが他のセンサの計測範囲外にあるときにも、その位置姿勢の算出を可能にする。
【解決手段】第1のセンサは、環境内の存在物の位置情報および色情報を第1の検知情報として得るものであり、第2のセンサは、存在物の色情報を第2の検知情報として得るものであり、情報処理装置は、第2のセンサの位置姿勢を仮に設定する位置姿勢仮設定部と、位置姿勢仮設定部により仮に設定された第2のセンサの位置姿勢から存在物を検知したときに得られる検知情報を、仮想検知情報として、第1の検知情報を用いて仮想的に作成する仮想検知情報作成部と、仮想検知情報作成部で作成された仮想検知情報と第2のセンサで得られた第2の検知情報を比較する比較部と、比較部の比較結果と仮に設定された第2のセンサの位置姿勢から、第2のセンサの位置姿勢推定値を出力する位置姿勢推定部を備える。
(もっと読む)
伝送端末、画像表示制御方法、画像表示制御プログラム、記録媒体、および伝送システム
【課題】ディスプレイの能力に応じて、画像データおよび補助情報を適切に表示させる。
【解決手段】表示装置と接続され、画像データを出力する伝送端末であって、前記表示装置が表示可能な解像度を取得する手段と、取得した前記表示可能な解像度に、画像データの伝送に用いる基準アスペクト比以外の解像度を含んでいるか否かを判定する手段と、当該解像度判定手段が前記基準アスペクト比以外の解像度を含んでいると判定した場合に、前記表示可能な解像度から前記基準アスペクト比以外の第一の解像度を選択し、前記基準アスペクト比以外の解像度を含んでいないと判定した場合、前記表示可能な解像度から前記基準アスペクト比の第二の解像度を選択する手段と、当該解像度選択手段による第一の解像度の選択の後、前記表示装置に出力する画像データにセグメント領域を付加する加工を行う手段と、前記解像度選択手段により選択された解像度に変更する手段とを備える。
(もっと読む)
基準マークモデルテンプレート作成方法
【課題】回路基材の基準マークのモデルテンプレートを誤りなく作成し得る方法を得る。
【解決手段】回路基材の基準マーク形成予定位置周辺を撮像装置により撮像し、それにより得られた画像の中から基準マークの像である可能性の高い像である基準マーク候補を抽出する基準マーク候補抽出工程(S2,S8〜S11)と、抽出された基準マーク候補が複数種類予定されている基準マークのいずれであるかを判別するマーク種判別工程(S3)と、そのマーク種判別工程の実施により種類が判明した基準マークのモデルテンプレートを作成するテンプレート作成工程(S5,S7)との実行により、モデルテンプレートの作成を行う。基準マーク候補抽出工程を、ハールライク特徴を用いた階層型アダブースト検出器を利用して基準マーク候補を抽出する工程とし、マーク種判別工程をニューラルネットワークを利用してマーク種を判別する工程とする。
(もっと読む)
シーンにおけるオブジェクトを分類する方法
【課題】オブジェクト分類は、3D距離データ用の正確な分類方法が必要であり、オブジェクトを分類する方法を提供する。
【解決手段】移動するオブジェクトが、1組の1つ又は複数の1次元レーザーラインスキャナーを備えたスキャナーによって取得された距離データの最大マージン分類及び識別確率的逐次モデリングに基づいて分類される。2次元画像の形態での距離データは、前処理され、その後分類される。分類器は、外観分類器と、種々の推論技法を用いる系列分類器と、オブジェクトの構造の状態機械実施とから構成される。
(もっと読む)
液晶アレイ検査装置およびライン座標位置算出方法
【課題】表示パターンのフレームサンプリングから得られた撮像画像(シグナルイメージ)の収縮、膨張等のフレーム間の幅に不均等な部分が生じた場合であっても、各ラインの座標位置を正確に算出し、液晶パネルのピクセル位置を正確に算出する。
【解決手段】表示パターンを撮像して得られる撮像画像(シグナルイメージ)において、実検出ラインの座標位置を検出した後、次に座標位置を検出する実検出ラインを求める際に、前の実検出ラインの信号強度パターンと比較することによってラインの良・不良の検出、および、不良ラインの収縮又は膨張の判定を行い、次の実検出ラインを求める。ラインの良・不良を検出し、不良ラインの収縮・膨張の判定することによって、ライン幅にばらつきが生じた場合であっても、各ラインの座標位置を正確に算出する。
(もっと読む)
人体検出装置
【課題】人体やペットの移動方向を確実に得られることができるようにするとともに、移動領域の長手方向を確実に得られることができるようにすることを目的とする。
【解決手段】住宅内の床面を撮影するとともに、撮影方向が床面と垂直になる位置に撮影装置1を設置し、撮影装置1によって撮影された画像の変化領域を解析して移動物体の移動方向を取得するとともに、取得した移動方向と変化領域の長手方向とが一致しなかった場合に、人体判定装置2にて人体が動いたと判定するようにしている。これにより、人体を検出するために使用される撮影装置1によって住宅内の床面が真上から撮影されるので、人体やペットが移動する際に撮影装置1に近付いたり遠ざかったりすることがなくなり、人体やペットの移動方向を確実に得ることができるとともに、移動領域の長手方向を確実に得ることができる。従って、人体とペットとをより確実に区別することができる。
(もっと読む)
環境認識装置および環境認識方法
【課題】対象物の特定効率および特定精度を向上し、処理時間の短縮化を図る。
【解決手段】環境認識装置130は、検出領域内に存在する対象部位の輝度を取得し、対象部位の高さを取得し、データ保持部152に保持された、輝度の範囲と道路表面からの高さの範囲と特定物との対応付け(特定物テーブル)に基づいて、対象部位の輝度と高さとから、対象部位に対応する特定物を仮決定、または、グループ化された対象物に対応する特定物を決定する。
(もっと読む)
位置姿勢計測装置、位置姿勢計測方法
【課題】 従来の2次元画像と距離画像を併用した場合の位置姿勢計測手法に比べて、複雑背景下であっても高速かつロバストに位置姿勢を計測すること。
【解決手段】 2次元画像対応探索部140は、撮像画像中における仮想物体の幾何特徴と、撮像画像中に映っている現実物体において該幾何特徴に対応する特徴部分と、の対応付けを行う。対応探索領域設定部150は、仮想物体を構成するそれぞれの図形を距離画像上に投影し、該投影された図形の領域から、特徴部分に対応する距離画像内の部分の周辺を省いた残りの領域を、対応探索領域として設定する。位置姿勢算出部170は対応探索領域内の画素の奥行き値が示す位置と該画素に対応する仮想物体上の位置との3次元空間における距離、幾何特徴と特徴部分との3次元空間における距離、を表す評価関数を最小化するように位置姿勢情報を繰り返し更新する。
(もっと読む)
光輝性顔料の同定方法、同定システム、同定プログラム及びその記録媒体
【課題】光輝性顔料の画像特徴量と銘柄のデータベースとを照合して任意の光輝性顔料を同定する。
【解決手段】光輝性顔料を撮像して画像データを取得する第1工程と、取得した画像データに対して背景処理を行い、光輝性顔料の粒子1個を含むその近傍部分の画像データを処理対象画像データとして抽出する第2工程と、処理対象画像データから画像特徴量を抽出する第3工程と、複数種類の光輝性顔料のそれぞれについて第1〜第3工程の処理を行い、光輝性顔料に関する情報と、抽出した画像特徴量とを予め対応させて記憶したデータベースを作成する第4工程と、被同定対象の光輝性顔料について第1〜第3工程の処理を行い、被同定対象の光輝性顔料の画像特徴量を抽出する第5工程と、抽出した被同定対象の光輝性顔料の画像特徴量に基づいて、データベースから被同定対象の光輝性顔料を同定する第6工程とを含み、画像特徴量が、光輝性顔料の色を表す特徴量を含む。
(もっと読む)
マシンビジョンシステムにおける潜在的な干渉要素の検査
【課題】マシンビジョンシステムにおける潜在的な干渉要素の検査を提供する。
【解決手段】マシンビジョン検査システムにおいて使用するためのロバストなビデオツールが提供される。ロバストなビデオツールには、関心領域と、ユーザインターフェースと、エッジ検出動作と、関心領域において検出されたエッジ点を含むと同時に除外領域におけるエッジ点を除外する現在の要素のエッジ点セットを決定する除外領域動作と、が含まれる。除外領域は、少なくとも1つの予め特徴付けられた要素、すなわち、予め特徴付けられた要素のエッジ点を検出し、かつ予め特徴付けられた要素の寸法パラメータを特徴付けるビデオツールを用いることによって特徴付けられる要素である少なくとも1つの予め要素付けられた要素に基づいて、除外領域ジェネレータによって決定される。
(もっと読む)
三次元モデリング装置、三次元モデリング方法、ならびに、プログラム
【課題】精度良く三次元モデルを作成する。
【解決手段】画像受付部11は、被写体を異なる角度から複数回撮像することにより得られる複数の画像の組の入力を受け付ける。三次元モデル生成部12は、受け付けられた複数の画像の組のそれぞれに基づいて、被写体の三次元モデルを複数生成する。三次元モデル選択部13は、被合成三次元モデルと合成三次元モデルとを選択する。特徴点抽出部14は、被合成三次元モデルと合成三次元モデルから、複数の第1特徴点と第2特徴点を抽出する。特徴点選択部15は、抽出された複数の第1特徴点と第2特徴点の中から、ステレオカメラ1との距離が近い特徴点を優先的に選択する。座標変換パラメータ取得部16は、座標変換パラメータを取得する。座標変換部17は、合成三次元モデルの座標を被合成三次元モデルの座標系の座標に変換する。三次元モデル合成部18は、合成三次元モデルを被合成三次元モデルに合成する。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】対象画像から高い精度でゴミ影部を検出することのできる画像処理装置を提供する。
【解決手段】撮像素子に撮像された処理対象画像に移り込む影部の輝度情報を用いて、光学部材に付着したゴミによるゴミ影部かを判定する輝度判定部63と、影部の色相情報を用いて、ゴミ影部かを判定する色相判定部64と、影部の彩度情報を用いて、ゴミ影部かを判定する第1彩度判定部65と、第2彩度判定部66と、を有し、影部が、輝度判定部、色相判定部及び第1彩度判定部においてゴミ影部と判定された場合、ゴミ影部と判定し、影部が、輝度判定部及び色相判定部においてゴミ影部と判定され、第1彩度判定部においてゴミ影部と判定されなかった場合、第2彩度判定部における判定を行い、第2彩度判定部においてゴミ影部と選択された場合、ゴミ影部と判定するゴミ判定部を備える。
(もっと読む)
目視される物体の表面に関する3次元データの品質の指示を表示するための方法およびデバイス
【課題】目視される物体の表面に関する3次元データの品質の指示を表示するための方法およびデバイスを提供する。
【解決手段】目視される物体202の表面210の画像500を獲得して、表示するステップであって、画像500の複数のピクセル231、232、233、234は、目視される物体202上の複数の表面ポイント221、222、223、224に対応する、ステップと、複数の表面ポイントに対応する複数のピクセルの各ピクセルに関して、ピクセルに対応する表面ポイントに関する3次元座標が利用可能性であるかどうかを判定するステップと、ピクセル231に対応する表面ポイント221に関する3次元座標が利用可能でない各ピクセル231に関する第1のオーバーレイ250を表示するステップとを備える方法。
(もっと読む)
監視装置及びプログラム
【課題】監視領域の撮影画像に基づいて監視を行う際、撮影画像の各画素について正確な三次元空間座標及び空間属性を保持するとともに常に最新の情報に更新することができる監視装置を提供する。
【解決手段】監視領域を連続撮影して得られた撮影画像の各画素に三次元座標により定まる位置を示す三次元空間座標を設定する設定手段(S103)と、撮影画像の各画素に該各画素が属する画像部位に対応する空間属性を付与すると共に、画像部位と隣接する画素の各々に画像部位との境界を示す空間属性を付与する付与手段(S113)と、境界を示す空間属性が付与された画素の各々から特徴量を繰り返し抽出する抽出手段(S117)と、抽出された特徴量の変化量が予め定められた閾値を超えた場合に、設定された三次元座標により定まる位置を示す三次元空間座標になるように前記画素の各々に設定された三次元空間座標を変更する変更手段(S129)と、を備えた。
(もっと読む)
異常検知装置
【課題】異常時の静止人物を効果的に検出する。
【解決手段】異常検知装置は、監視領域を撮影した監視画像を順次取得する撮像部20と、監視画像を処理する制御部22と、前記制御部が異常を検知すると異常信号を出力する出力部23を具備する。制御部22は、監視画像から、人物を検出する人物抽出手段220と、人物を時間的に追跡する人物追跡手段221と、人物について略静止している静止人物を検出する静止人物検出手段223と、静止人物の検出時より以前の所定時間内に、当該静止人物が他の人物と接触していれば異常と判定する異常判定手段225と、を有する。
(もっと読む)
101 - 120 / 1,739
[ Back to top ]