
Fターム[5B057DC03]の内容
Fターム[5B057DC03]に分類される特許
1 - 20 / 1,739
情報処理装置、情報処理装置の制御方法、およびプログラム
三次元計測方法、三次元計測装置及び三次元計測プログラム
情報処理装置、情報処理装置の制御方法、およびプログラム
環境認識装置
道路形状推定装置及びプログラム
同期されたユーザインタフェース機能を含むマシンビジョンシステムプログラム編集環境
駐車支援装置
画像処理装置、撮像装置及び画像処理プログラム
投影装置、3次元計測装置並びにその制御方法およびプログラム
横断歩道検出装置
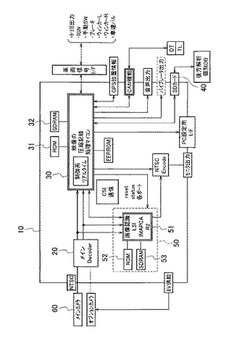
【課題】制御系の演算処理に対する負荷を軽減しつつ、車両と共に移動する車載のカメラによる撮影画像から精度良く横断歩道を検出すること。
【解決手段】車両に搭載したカメラ60からの撮影画像の画像認識領域の部分をマイコン30でエッジ処理し、エッジ処理した画像信号を画像認識LSI51で高速フーリエ逆変換して、強周期性を有するゼブラパターンを画像認識領域中から抽出する。抽出したゼブラパターンの周期性が横断歩道の周期性の範囲内であれば、そのゼブラパターンを横断歩道であるとマイコン30が認識する。
(もっと読む)
情報端末装置

【課題】マーカや特別なセンサを用いることなく、撮像対象の位置及び姿勢を推定して表示部を制御する情報端末装置を提供する。
【解決手段】撮像部2と、情報を表示する表示部6と、表示部6で表示する情報を記憶する記憶部5とを備える情報端末装置1において、撮像部2で撮像した画像より撮像対象の撮像部2に対する位置及び姿勢を推定する推定部3と、記憶部5から読み出して表示部6で表示する情報を、推定された位置及び姿勢に応じて制御する制御部4とを備え、推定部3は、画像より撮像対象の複数の線分を抽出する線分抽出部30と、抽出された複数の線分と、撮像対象の所定配置の画像において撮像対象に対して予め設定された複数の基準線分との平面射影変換の関係を求めて、該写像関係より位置及び姿勢を推定する姿勢推定部34とを含むように構成する。
(もっと読む)
手領域検出装置、手領域検出方法、プログラム及び記憶媒体
【課題】手領域を精度良く検出することが可能な手領域検出装置、手領域検出方法及びプログラムを提供する。
【解決手段】手領域検出装置は、入力画像に対してセグメンテーションを行うことで、手領域の候補となる複数の領域を抽出するセグメンテーション手段と、セグメンテーション手段によって抽出された領域の輪郭線上に位置する一の輪郭点と、輪郭線上に位置する他の輪郭点との距離を、輪郭線を構成する全ての輪郭点について求め、求められた距離に基づいて、セグメンテーション手段によって抽出された複数の領域の中から手領域を決定する手領域決定手段と、を備える。
(もっと読む)
画像処理装置、および画像処理方法、並びにプログラム
【課題】距離画像や視差画像に含まれるエラーを低減する補正処理を行う画像処理装置、方法を提供する。
【解決手段】被写体までの距離情報または視差情報を有する距離画像を入力し、距離画像に含まれるエラー信号を検出し、画像領域単位のエラー度合いに応じた合成係数を出力するエラー判定処理部と、距離画像に対するローパスフィルタを適用してノイズ低減距離画像を生成するローパスフィルタ処理部と、距離画像と、ノイズ低減距離画像の合成処理により補正距離画像を生成する距離画像合成部を有し、距離画像合成部は、エラー判定処理部の出力する画像領域単位の合成係数に従って、画像領域単位で距離画像とノイズ低減距離画像の合成比率を設定した合成処理を実行して補正距離画像を生成する。
(もっと読む)
情報処理装置、情報処理装置の制御方法、およびプログラム
【課題】センサ校正に関する知識やノウハウのない作業者であっても、センサ校正用入力データを容易に取得し、精度よく校正を行うための校正用入力データであるか否かを容易に判断できるようにする。
【解決手段】撮像装置に対する位置姿勢センサの位置または姿勢を校正するための校正用入力データを処理する情報処理装置であって、撮像装置により撮像された画像を取得する画像取得部と、画像から指標情報を検出する指標検出部と、位置姿勢センサにより計測された位置姿勢センサ自身の位置または姿勢の計測値を取得する計測値取得部と、指標情報と計測値とを含む校正用入力データの推奨レベルを、指標情報と計測値とに基づいて算出する算出部と、推奨レベルを提示する提示部と、を備える。
(もっと読む)
俯瞰映像生成装置、俯瞰映像生成方法、映像表示システムおよびナビゲーション装置
【課題】撮像画像を俯瞰画像に変換する変換パラメータを簡易に調整できる俯瞰映像生成装置、俯瞰映像生成方法、映像表示システムおよびナビゲーション装置を提供する。
【解決手段】俯瞰変換部23が、画像を射影変換により俯瞰画像に変換する俯瞰パラメータを記憶する俯瞰パラメータ記憶部25から読み出した俯瞰パラメータを用いて、カメラ10により撮像された撮像画像を俯瞰画像に変換し、間隔指標算出部24bが、等間隔のパターンの標示が撮像された撮像画像を変換した俯瞰画像上で標示のパターンの間隔が揃う度合を示す間隔指標値を算出し、俯瞰パラメータ算出部24cが、算出された間隔指標値に基づいて、俯瞰画像上で標示のパターンの間隔が所定の範囲内で揃う俯瞰パラメータを算出して俯瞰パラメータ記憶部25に記憶する。
(もっと読む)
電子情報提供システム及び電子情報提供方法
【課題】人物を撮像した画像から該人物の属性を判定して情報を選択し、選択した情報を該人物によって閲覧されるように表示する。
【解決手段】人物を含む画像を撮像するカメラと、このカメラによって撮像された人物が移動する方向かつカメラから離れた位置に設置された情報表示装置と、カメラで撮像された画像を用いて人物の属性を判定して該属性に基づいて情報を選択すると共に、この人物が情報表示装置に到達する前に、選択した情報を情報表示装置に表示するよう制御する制御装置とによって電子情報提供システムを構成する。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】文字の線幅に依存することなく、また色背景中の文字や色枠等についても、良好に再現した二値画像を取得することができる画像処理装置を提供する。
【解決手段】境界抽出部1は処理対象画像から濃度境界や色境界などの境界を抽出する。第1距離取得部2は、注目画素から境界までの最短距離を第1距離として取得する。参照領域設定部3は、第1距離取得部2で取得した第1距離に応じた大きさの注目画素を含む参照領域を設定する。例えば第1距離にある境界を跨ぐ大きさの注目画素を設定する。二値化部4は、処理対象画像から参照領域設定部3で設定した参照領域の画素値を読み出し、その画素値の平均値を閾値として注目画素を二値化する。
(もっと読む)
画像処理装置、車両システム、及び、画像処理方法
【課題】天候及び距離によらず好適に物体までの距離を算出する。
【解決手段】画像処理装置は、取得された第1の車両の前方の画像から、第1の車両の前方の第2の車両の画像を検出する車両検出部と、第1の車両と第2の車両との距離を算出するために必要な複数のパラメータのうち、第2の車両の画像と前方の画像とから取得できないパラメータを判定する状況判定部と、第2の車両の画像と前方の画像とからパラメータを取得し、取得されたパラメータによって第1の車両と第2の車両との距離を算出する少なくとも一つの距離測定部と、を備え、状況判定部が、取得できないパラメータを判定した場合、少なくとも一つの距離測定部は、状況判定部によって判定された取得できないパラメータ以外のパラメータを用いて第1の車両と第2の車両との距離を算出するため、第2の車両の画像と前方の画像とを取得する。
(もっと読む)
人物誘導ロボット
【課題】人物を的確に認識すると共に、その人物を確実に目的地に誘導することのできる人物誘導ロボットを提供する。
【解決手段】ロボットR1の周囲における静止中または移動中の人物を認識する人物認識手段100と、ロボット自体を移動させる移動手段200と、誘導すべき人物に対して、誘導に必要な情報を移動経路を構成する床面または移動経路周辺の壁面に投影して表示する表示手段300と、該表示手段で表示された表示内容に対する誘導すべき人物による入力指示を検出する検出手段400と、検出手段によって検出された入力指示に基づいて、移動手段および表示手段を制御する制御手段500とを備える。
(もっと読む)
車外環境認識装置および車外環境認識方法
【課題】対象物の特定精度を向上する。
【解決手段】
車外環境認識装置130は、複数の色識別子と輝度範囲とを対応付けて保持しておき、車外環境を撮像した画像を取得し、自車両との相対的な位置関係に応じて画像の検出領域を複数の特定領域に分割し(S306)、特定領域毎に色識別子に対応付けられた輝度範囲を再設定し(S308)、検出領域内の複数の対象部位の輝度と対象部位が位置する特定領域に再設定された輝度範囲とに基づいて、対象部位に色識別子を設定し(S310)、水平距離の差分および高さの差分が所定範囲内にある1または複数の対象部位をグループ化する(S312)。
(もっと読む)
1 - 20 / 1,739
[ Back to top ]