
Fターム[5B057DC05]の内容
Fターム[5B057DC05]の下位に属するFターム
重心 (501)
始点、終点、屈曲点、分岐点 (396)
Fターム[5B057DC05]に分類される特許
21 - 40 / 1,510
画像処理装置、方法、及びプログラム
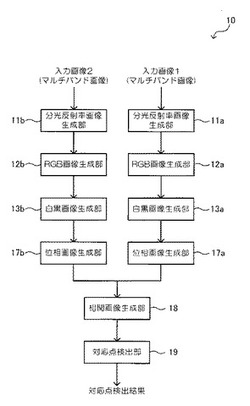
【課題】撮影時の照明光のスペクトル及び撮影手段の分光感度の少なくとも一方が異なる条件で撮影された複数の画像間での対応点検出精度を向上させる。
【解決手段】分光反射率画像生成部11a、11bで、マルチバンド画像の画素値、撮影時のカメラの分光感度、観察照明光のスペクトル、及び被写体の統計的性質から求められた先見情報を用いて、ウィナー推定により画素毎の分光反射率を推定し、推定した分光反射率を画素値とする分光反射率画像を生成する。RGB画像生成部12a、12bで、分光反射率画像と予め定めた照明光スペクトルと予め定めたカメラの分光感度とを掛けあわせてRGB画像を生成する。白黒画像生成部13a、13bで、RGB画像から白黒画像を生成し、位相画像生成部17a、17b、相関画像生成部18、及び対応点検出部19で、2つのマルチバンド画像間の対応点を検出する。
(もっと読む)
車両周辺監視装置

【課題】俯瞰画像上で全体が表示されていない目標物に対し、俯瞰画像上の境界線を変更し全体を表示できるようにした車両周辺監視装置を提供すること。
【解決手段】複数の撮像装置が互いに共通する視野領域とする俯瞰画像の共通領域に位置する障害物と判定された画像から抽出された複数の特徴点に対し、三次元計測処理部43において得られた相対運動情報による一定の経過時間を想定したときの予想軌跡と時刻変化をもとに、前記共通領域を互いに共通する視野領域とする各カメラについて“前記特徴点が写る/写らない”を予測しその予測結果を得る。そして、前記予測結果から、前記俯瞰画像の共通領域について、前記特徴点が抽出された障害物131をより広範囲に写すことの可能なカメラによる部分俯瞰画像を優先させ、フィードフォワード的に俯瞰画像の繋ぎ目、境界線を変更し、障害物131がより広範囲に俯瞰画像に表示されるようにする。
(もっと読む)
3次元座標取得装置、カメラ姿勢推定装置、プログラム
【課題】カメラ姿勢の推定精度を向上させるとともに、処理負荷を軽減させる。
【解決手段】3次元座標取得装置100は、カメラによって撮像された立体対象物の撮像画像から当該カメラのカメラ姿勢を推定する際に用いられる前記立体対象物の3次元座標を取得する3次元座標取得装置であって、前記撮像画像から、画像平面内の特徴点を検出する特徴点検出部111と、前記カメラの焦点及び前記画像平面内の特徴点を通過する直線の方程式と、前記立体対象物の方程式とから、前記直線と前記立体対象物との交点を算出し、前記特徴点の3次元座標として取得する3次元座標取得部113とを備える。
(もっと読む)
顔印象判定チャート
【課題】被験者の顔形状を客観的かつ簡易に評価することを可能にする。
【解決手段】顔印象判定チャート10は、人の頭部形状に関する高次の基底ベクトルの少なくとも一つの重み係数が互いに異なる第一の頭部画像20および第二の頭部画像30が対比可能に配置されている。顔印象判定チャート10を参照して被験者の顔形状を目視観察することにより、被験者の顔に発現している基底ベクトルの次数とその発現度合いを定量的に把握することが可能である。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】画像の領域の大きさを使用者の操作精度によらず容易かつ均一に得ることが可能な画像処理装置および画像処理プログラムを提供する。
【解決手段】画像データに基づく初期画像IMにおいて抽出される領域A4が表示部260の画像表示領域261に表示される。表示された領域A4に外接する外接矩形Pが作成される。作成された外接矩形Pが表示部260の画像表示領域261に表示されるとともに、作成された外接矩形Pの予め定められた部分の寸法または面積を示す特徴量が算出される。使用者は、入力装置を用いて表示部260の画像表示領域261に表示された外接図形Pを回転させることができる。
(もっと読む)
移動体検出装置、コンピュータプログラム及び移動体検出方法
【課題】高い精度で移動体を検出することができる移動体検出装置、コンピュータプログラム及び移動体検出方法を提供する。
【解決手段】特徴点抽出部103は、撮像画像の各画素の画素値に基づいて複数の特徴点を抽出する。候補点特定部104は、抽出された特徴点から車両の所定部位の候補点を1又は複数特定する。透視投影変換部105は、特定された候補点を、透視投影変換行列を用いて3次元座標空間に逆投影する。3次元モデル配置部106は、逆投影された候補点に整合させて3次元モデルを配置する。透視投影変換部105は、配置された3次元モデルを撮像画像に投影する。移動体検出部107は、撮像画像へ投影された3次元モデルにより画定される領域内に含まれる特徴点の数に基づいて、車両を検出する。
(もっと読む)
情報処理装置、画像選択方法およびプログラム
【課題】 アルバムに用いる画像をアルバムに登場させる人物の登場回数および画像上の人物に関する構図に基づいて画像を選択する。
【解決手段】 アルバムに用いる画像を選択する情報処理装置であって、アルバムに登場させる人物を設定する人物設定手段と、画像の構図に基づいて、当該画像を評価する画像評価手段と、画像上に前記アルバムに登場させる人物が登場する回数をカウントするカウント手段と、前記評価手段による評価と前記カウント手段によるカウント値に基づいて、アルバムに用いる画像を選択する選択手段とを有することを特徴とする情報処理装置を提供する。
(もっと読む)
3次元座標位置推定装置、その方法、そのプログラムおよび3次元座標推定システム、ならびに、カメラ較正情報生成装置
【課題】マーカを複数のカメラで撮影したそれぞれの画像からマーカの3次元座標位置を推定する3次元座標位置推定装置を提供する。
【解決手段】3次元座標位置推定装置1は、少なくとも30台以上のカメラによって撮影されたカメラ画像を入力する画像入力手段11と、カメラごとに、カメラ画像からマーカの2次元座標位置を検出する点光源(マーカ)検出手段12と、カメラパラメータに基づいて、全カメラ共通の座標系において、カメラごとに、点光源(マーカ)検出手段12で検出された2次元座標位置と、当該カメラの光学中心とを結ぶ直線式を算出する点光源(マーカ)方向算出手段13と、カメラごとの直線式との距離の総和が最小となる位置を、マーカの3次元座標位置として算出する距離最小位置算出手段14と、を備えることを特徴とする。
(もっと読む)
画像向き判定装置、画像向き判定方法、及びプログラム、並びに記録媒体
【課題】ユーザーの意図する向きで画像を表示する。
【解決手段】顔画像領域検出回路は、取り込んだデジタルの画像データから顔画像領域を検出する。画像向き判定手段30は、登録画像判定部35、目つぶり判定部36、年齢判定部37、表情判定部38、顔画像サイズ判定部39、及び顔画像向き判定部40を備え、検出した顔画像が事前に登録されているか、目つぶりの顔画像でないか、顔画像の年齢が月齢六ヶ月以上か、及び怒り顔の顔画像かの条件のうちの少なくともいずれか1つの条件と、顔画像のサイズ又は向きとの条件を組み合わせて画像データの向きを判定する。
(もっと読む)
3次元計測システム及び3次元計測方法
【課題】外部標定の容易なステレオ撮影による3次元計測システム及び3次元計測方法を提供する。
【解決手段】3次元計測システムは、測定対象物1を複数方向から撮影してステレオ画像20を得るステレオ撮影部11と;測定対象物の全体をカバーする基準体2の一部を構成する、複数の基準マーク4を有するサブ基準体3と;ステレオ撮影部で撮影して得たステレオ画像に基づくサブ基準体が有する複数の基準マークの3次元座標値の撮影測定値fと予め基準計測された基準測定値gとを含む、基準体の3次元数値解析モデルである基準体モデル102を3次元計算空間V中に一体として画成する基準体情報画成部12と;基準体モデルを用いてステレオ撮影部の外部標定要素を算出する標定要素算出部13と;外部標定要素により定位されたステレオ撮影部により撮影される測定対象物のステレオ画像から測定対象物の3次元計測をおこなう3次元計測部14とを備える。
(もっと読む)
画像処理装置および制御プログラム
【課題】多重露光撮影において、被写体の移動速度が遅い場合、あるいは撮影間隔が短い場合に、被写体同士が重なり合って煩雑な絵柄となり、被写体の輪郭も不明確となることがあった。この場合、観察者は、主要被写体を認識しづらく、視線が定まらずに不愉快な思いをすることもあった。
【解決手段】上記課題を解決するために、画像処理装置は、画像データを複数枚取得する取得部と、複数枚の画像データから、予め定められた条件に基づいて自動的に1枚の選択画像データを選択する選択部と、選択画像データと他の画像データの透明度を異ならせて1枚の合成画像データを生成する生成部とを備える。
(もっと読む)
パノラマ画像作製プログラム
【課題】元の画像データにアクセス容易であって、医療分野に適したパノラマ画像作成プログラムを提供する。
【解決手段】コンピュータに、複数の内視鏡画像データを記録する内視鏡画像データ記録手段、複数の内視鏡画像データに基づき、各画素の位置に対応したインデックスデータが付されたパノラマ画像データを作成し、表示するパノラマ画像データ作成表示手段、インデックスデータに基づき、複数の内視鏡画像データのいずれかを内視鏡画像として表示させる内視鏡画像データ表示手段、として機能させるためのパノラマ画像作成プログラムとする。
(もっと読む)
画像生成装置、画像生成方法、画像生成装置用プログラム
【課題】低コストで、より少ない演算量で画像を生成する画像生成装置等を提供する。
【解決手段】複数の撮像装置20a、20bにより第1位置から撮像された第1画像30aと第2位置から撮像された第2画像30bとの入力を受け付け(S1)、第1画像および第2画像の各画素の色相を求める色相変換を行い(S3)、色相変換された第1画像および第2画像から、第1画像および第2画像の特徴点を抽出し(S6)、第1画像と第2画像とにおいて対応する特徴点を求め(S7)、対応する特徴点の間の距離を有する視差ベクトルを算出し(S8)、第1位置と第2位置との間に第3位置を設定し、第1位置および第2位置に対する第3位置の位置関係と視差ベクトルとに従い、第1画像と第2画像とから、第3位置から撮像された場合の第3画像(35a、35b、35c)を生成する(S12)。
(もっと読む)
雑音除去装置
【課題】雑音除去フィルタとしての雑音除去処理の能力を担保しつつ、雑音除去フィルタとしてのハードウェア的な規模を縮小することが可能な雑音除去装置を提供する。
【解決手段】一定方向の走査線Lにより順次走査される複数の画素Pxにより形成されるデジタル画像における中心画素Px24の輝度と、当該中心画素Px24の周囲の複数の他の画素Pxの輝度と、を用いて、フィルタ対象領域Fにおける雑音除去処理を行う場合に、フィルタ対象領域Fにおいて走査線L上に並ぶ画素Pxの輝度を記憶し、且つフィルタ対象領域Fにおける走査線Lの数に対応した数のラインメモリを備えるとき、フィルタ対象領域Fにおける走査線L上の画素Px11乃至画素Px17の数が、走査線Lに垂直な方向の画素数より大きくされている。
(もっと読む)
画像処理装置、画像処理方法、及びプログラム
【課題】、ロバスト性及び精度の高い水平視差の検出を行なうことが可能な技術が求められていた。
【解決手段】本開示によれば、同じ被写体が互いに異なる水平位置に描かれた基準画像及び参照画像を取得する画像取得部と、基準画像を構成する基準画素と、参照画像を構成する第1の参照画素、及び第1の参照画素と垂直位置が異なる第2の参照画素を含む参照画素群とに基づいて、参照画素群から、基準画素に対応する対応画素の候補である候補画素を検出し、基準画素の水平位置から候補画素の水平位置までの距離を示す水平視差候補と、基準画素の垂直位置から候補画素の垂直位置までの距離を示す垂直視差候補とを関連付けて記憶部に記憶させる視差検出部と、を備える、画像処理装置が提供される。
(もっと読む)
3次元位置・姿勢認識装置およびその方法、プログラム
【課題】本発明は、対象体本来の形状のうち部分的な形状の情報を欠いた計測点群を用いる場合であっても、対象体の3次元位置・姿勢を適切に認識可能な3次元位置・姿勢認識装置およびその方法、プログラムの提供を目的とする。
【解決手段】本発明にかかる3次元位置・姿勢認識装置は、計測点群と、対応するモデル点群とをマッチングさせ、モデル点群のうち、マッチング結果に基づいて特定される点を削除処理するモデル処理手段10と、計測点群と、モデル処理手段10において削除処理したモデル点群とをマッチングさせ、対象体3の3次元位置・姿勢を認識する認識手段11とを備えることを特徴とする。
(もっと読む)
非固定カメラの動的パラメータ推定方法およびプログラム
【課題】非固定カメラ映像中の2次元座標と、対象空間における特定平面上の世界座標間で成立する射影関係(平面射影行列)を、時間軸方向の相関に基づき動的に推定する。
【解決手段】特定フレームに関する射影行列を推定し、射影行列が推定済みのフレームと未推定のフレーム間の対応点を複数抽出し、抽出された対応点に基づいて、未推定のフレームでの射影行列を推定することで、非固定カメラ画像中の2次元座標と、対象空間の3次元世界座標との間で成立する射影行列を推定する。
(もっと読む)
画像検索プログラム及び画像検索装置
【課題】共有された画像情報から自己の登録した画像情報に基づいて関連する画像情報を検索する画像検索プログラム及び画像検索装置を提供する。
【解決手段】画像検索装置1は、画像情報DB2に登録する画像情報20を受け付ける画像情報受付手段100と、受け付けた画像情報20の画像に含まれる人物の顔を認識して顔情報111を生成する顔情報認識手段101と、受け付けた画像情報20が有する付随情報112を抽出する付随情報抽出手段102と、画像情報DB2に登録済みの画像情報20から選択された画像情報を検索条件として受け付ける検索条件受付手段103と、検索条件受付手段103が受け付けた画像情報の顔情報と、付随情報とに基づいて、画像情報DB2に登録済みの画像情報20から類似度の高い画像情報を検索する画像情報検索手段104と、検索結果を出力する検索結果出力手段105とを有する。
(もっと読む)
箱体の品質検査装置
【課題】箱体の姿勢にかかわらず接合部の精度を正確に検査でき、箱体の形状精度や印刷品質、異物の有無も同時に検査することができ、検査スペースの効率化を図ることができる品質検査装置を提供する。
【解決手段】接合部を挟んで隣り合う2つの領域を撮像する撮像手段3と、照明手段4と、基準形状データ記憶部、及び基準画像データ記憶部を有する記憶手段50と、撮像される画像に基づき形状データを検出し、各領域の基準形状データと対比することにより各領域のずれ量を算出し、各領域の形状精度の良否を判定する形状精度判定手段と、形状精度判定手段により算出される各領域のずれ量に基づき、当該箱体の接合精度の良否を判定する手段と、撮像手段により撮像される画像に基づき各領域の画像データと基準画像データ記憶部に記憶された各領域の基準画像データとを対比することにより各領域の印刷品質の良否及び異物の有無を判定する手段とを備えた。
(もっと読む)
被写体の3次元形状を復元する装置、方法およびプログラム
【課題】多視点画像から、被写体の表面上にある点を多数求め、3次元形状を高精度に復元する装置を提供する。
【解決手段】被写体を複数台のカメラで撮影した多視点画像と各カメラのカメラパラメータから、多視点画像における被写体の遮蔽輪郭線を抽出し、カメラパラメータから、該遮蔽輪郭線を構成する各点において対応する接線を求め、算出した接線上の被写体表面に対する接点の位置を推定し、接点を被写体表面上の特徴点として、被写体の表面の形状を復元する被写体の3次元形状を復元する装置。
(もっと読む)
21 - 40 / 1,510
[ Back to top ]