
Fターム[5B057DC05]の内容
Fターム[5B057DC05]の下位に属するFターム
重心 (501)
始点、終点、屈曲点、分岐点 (396)
Fターム[5B057DC05]に分類される特許
101 - 120 / 1,510
画像合成装置と画像合成方法およびプログラム
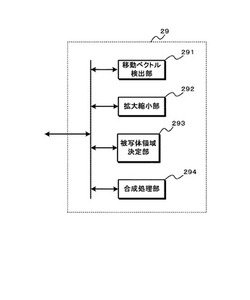
【課題】画像の合成を制御して高品質である広画角の合成画像を容易に生成できるようにする。
【解決手段】被写体領域決定部293は、撮像時に測距を行って生成された複数点の被写体距離情報に基づき、撮像画像における近接被写体の領域を決定する。合成処理部294は、決定された近接被写体の領域の位置に基づき、撮像画像から画像を切り出して繋ぎ合わせて合成画像を生成する。したがって、近接被写体の領域を分割しないように画像を切り出して繋ぎ合わせることで、繋ぎ目に上書きする画像の選択操作や選択した画像を繋ぎ目に上書きする処理を行う必要がなく、高品質である広画角の合成画像を容易に生成できる。
(もっと読む)
画像処理装置、および画像処理方法

【課題】正確に瞳の領域を検出することができる画像処理装置を実現する。
【解決手段】本発明に係る画像処理装置6は、人物の顔画像から目の特徴を特定する画像処理装置であって、顔画像の目がある目領域を、目における横方向に微分して輝度勾配を求める第1微分部31と、目領域について、輝度勾配を3値化し、左側が右側より明るい境界に対応する第1エッジ点と、左側が右側より暗い境界に対応する第2エッジ点とを、エッジ点として抽出する3値化部32と、ハフ変換を用いて、各エッジ点について、第1エッジ点および第2エッジ点のいずれであるかに応じて、かつ、投票対象である楕円と該エッジ点との位置関係に応じて、楕円に対する投票の重みを変えて投票を行う第1投票部33と、第1投票部33の投票結果に基づいて、瞳の輪郭を表す楕円を特定する瞳輪郭特定部34とを備える。
(もっと読む)
画像表示制御装置及びプログラム
【課題】画像が遷移する過程を閲覧者が見逃してしまうのを防止する。
【解決手段】画像表示制御装置1は、画像を記憶する画像データベース81と、画像データベース81に記憶された画像をディスプレイ20に表示制御するCPU9と、表示制御された画像の視認側方向を撮影するカメラ50と、を備える。CPU9は、カメラ50による撮影画像内で顔認識を行うとともに、認識された各顔から視線の向きを検出する。CPU9は、検出された各顔の視線のうち、表示制御された画像に少なくとも1つの視線が向いている場合に、当該画像を加工処理の施された加工画像に所定速度で遷移させて表示制御する。
(もっと読む)
画像処理装置、画像処理方法、及び画像処理プログラム
【課題】複数の画像を効率よく処理する画像処理装置、画像処理方法、及び画像処理プログラムを提供する。
【解決手段】複数の画像取得部は各々画像を取得し、車両情報取得部は車両の移動状態を示す車両情報を取得し、画像補正量算出部は複数の画像取得部のうち1つの画像取得部が取得した第1の画像と、他の画像取得部が取得した第2の画像との位置関係に基づき画像補正量を算出し、画像補正値算出部は、車両情報に基づいて推定した位置関係に基づき当該画像補正量を算出する。
(もっと読む)
画像形成装置、画質調整方法、プログラムおよびその記録媒体
【課題】記録材上に形成される画像に周期性の画質不良が生じることを防止する。
【解決手段】画質特性解析用パターンの画像を面積階調への変換処理を施すことなく画像出力装置400により記録材上に形成した結果を画像入力装置200によって読み取って画質解析用画像データを取得し、画質解析用画像データに含まれる各パッチ画像の画像データにおける空間周波数毎の信号強度を算出し、当該空間周波数毎の信号強度の分布特性と上記ディザパターン記憶部に記憶しているディザパターンのうち当該各パッチ画像の階調レベルに対応する各ディザパターンの空間周波数毎の信号強度の分布特性との一致の度合いを示す指標を算出する。ディザパターン最適化部21は、階調再現処理18において画質調整後の階調再現処理で用いるディザパターン群を画質調整前に設定されていたディザパターン群よりも上記指標が低くなるディザパターン群に設定する。
(もっと読む)
画像診断支援装置およびその動作方法、並びに画像診断支援プログラム
【課題】横隔膜のような胸腹部を分ける境界面や臓器を複数の区域に分ける組織の境界面を抽出することにより、画像診断を支援する。
【解決手段】
被写体を分割する境界面上に存在する複数の点を入力点として設定し(#2)、入力点を用いて、境界面に近似する平面を基準平面として決定する(#3)。被写体の外側において、基準平面上に複数の補助点を設定し(#4)、補助点と入力点を用いて入力点を補間して前記境界面に近似する曲面を生成して(#8)、生成した曲面を前記境界面として被写体を分けた領域に分割する(#10)。
(もっと読む)
画像処理装置、画像表示システム及び画像処理方法
【課題】不要な指標の表示を防止する。
【解決手段】画像表示システム10では、物体検出部22aが、撮影画像中の検出領域に存在する物体データを検出する物体検出処理を周期的に実行する。また、対応判定部22bが、直近の物体検出処理で検出された物体データと、管理テーブル24bに登録された過去の物体検出処理で抽出された物体データとを対応付ける対応判定処理を実行する。そして、第1削除部22cが、対応付けできない回数が所定条件を満足する物体データを管理テーブル24bから削除する。さらに、第2削除部22dが、検出領域DAの外縁に到達した物体データを、管理テーブル24bから削除する。そして、枠重畳部22eが、管理テーブル24bに登録されている物体データの位置を示す強調枠を撮影画像に重畳する。したがって、検出領域の外縁に到達した物体データの強調枠が表示されない。
(もっと読む)
情報処理装置
【課題】セキュリティが考慮された、使い勝手の良い情報処理装置を提供する。
【解決手段】画像を入力する第1入力装置(52)と、位置情報と時刻情報との少なくとも一方の情報を入力する第2入力装置(52)と、前記画像の出力指示があったときに、前記第2入力装置(52)が入力した情報に基づいて前記画像の出力に制限を加えるか否かを判断する判断装置(70)と、を備える情報処理装置(50)である。
(もっと読む)
環境認識装置
【課題】信号機の矢印信号を的確に認識することが可能で、しかも、信号機が自車両から遠い位置にある段階から矢印信号を認識することが可能な環境認識装置を提供する。
【解決手段】環境認識装置1は、撮像手段2が撮像した画像Tに基づいて信号機Sの赤信号Lr等を検出する赤信号等検出手段12と、検出された赤信号Lr等の画像T中の位置に基づいて設定した探索領域Rs内に撮像されている矢印信号Aを抽出する矢印信号抽出手段13とを備え、矢印信号抽出手段13は、自車両MCから赤信号Lr等までの実空間上の距離Zに応じて矢印信号Aが指し示す方向を認識する手法を切り替え、自車両MCから遠い第一の所定区間Sec1内にある場合には画像T中における矢印信号Aと赤信号Lr等との相互の位置関係に基づいて矢印信号Aが指し示す方向を認識する。
(もっと読む)
画像処理装置、画像処理方法およびプログラム
【課題】画像中の特定領域の位置・姿勢を高精度に推定可能な、画像処理装置、画像処理方法およびプログラムを提供する。
【解決手段】入力画像I1の特徴点を抽出する特徴点抽出部11と、参照画像Rとの間で特徴点の対応関係を決定するマッチング部12と、対応関係に基づき入力画像I1と参照画像Rの射影関係を算出するホモグラフィ算出部13と、射影関係に基づき入力画像I1の少なくとも一部を変換する画像変換部14とを備え、ホモグラフィ算出部13は、入力画像I1について、参照画像Rとの間で特徴点の対応関係に基づきホモグラフィ行列H1を算出し、画像変換部14によりホモグラフィ行列H1に基づき変換された入力画像I1について、参照画像Rとの間で特徴点の対応関係に基づきホモグラフィ行列H2を算出し、ホモグラフィ行列H1、H2に基づき入力画像I1と参照画像Rの射影関係を再び算出する
(もっと読む)
車両認識装置、車両認識方法および車両認識プログラム
【課題】車両を認識する場合に用いるデータベースを信頼できる状態で構築する。
【解決手段】車両認識装置100は、ナンバープレート認識部140aおよび車両特徴認識部140bからナンバープレート情報および車両特徴情報1Bを取得し、データベース130に登録された特徴の信頼度を調整する。具体的には、車両認識装置100は、データベース130の車両特徴情報1Aと、車両特徴情報1Bとを比較し、一致する特徴の信頼度を上げ、一致しない特徴の信頼度を下げる。車両認識装置100は、車両特徴情報1Aにおいて、信頼度の低い特徴の内容を、車両特徴情報1Bの特徴の内容に更新する。
(もっと読む)
画像データの識別方法及び撮像装置、プログラム、及び記憶媒体
【課題】 個人認証に要する時間を短縮することが可能な撮像装置を提供する。
【解決手段】 複数のフレームの画像データに含まれる顔画像データに対して、個人の識別と表情の識別のいずれかの識別処理を行う画像データの識別方法において、顔検出手段が、前記画像データに含まれる顔画像データを検出する顔検出工程(S202)と、識別手段が、前記顔検出工程で検出された1つまたは複数の顔画像データに対して前記識別処理を行う識別工程(S207)とを有し、前記識別工程では、前記識別処理を行うフレームの画像データに含まれる顔画像データと同じ人物を示す、前のフレームの画像データに含まれる顔画像データについて、前記識別処理に成功した場合に、失敗した場合よりも、高い数値を与えるものであって、該数値の高いものから予め設けた上限に達する数までの顔画像データに対して前記識別処理を行う。
(もっと読む)
サムネイル抽出プログラム及びサムネイル抽出方法
【課題】3次元映像に適したサムネイルを抽出できるサムネイル抽出プログラム及びサムネイル抽出方法を提供することを課題とする。
【解決手段】3D映像の一フレームを構成するフレーム画像ペア間で対応する特徴点を特徴点ペアとしてフレーム画像ペアから抽出し、特徴点ペアの奥行き量を特徴点ペアの点間距離、レンズ間距離・焦点距離を基に算出して、奥行き量で前記特徴点ペアをクラスタリングし、予め定められたクラスタリングの結果情報に基づくフレーム画像ペアの立体的な見え易さの評価条件を基に、1以上のフレーム画像ペアのクラスタリングの結果情報から1以上のフレーム画像ペアの立体的な見え易さを評価し、立体的な見え易さの評価結果に基づき、評価結果の最も良い前記フレーム画像ペアを、サムネイル用の前記フレーム画像ペアとして抽出する処理をコンピュータに実行させるサムネイル抽出プログラムにより上記課題を解決する。
(もっと読む)
撮像装置および撮像方法
【課題】モニター上に表示されている複数の人物から所定の人物を容易に特定可能とする。
【解決手段】本発明の撮像装置100は、特定の人物の顔の特徴量を記憶する特徴量記憶部160と、被写体像を光電変換し画像信号を生成する撮像素子146と、画像信号における画面内の1または複数の顔を抽出する顔抽出部180と、抽出された1または複数の顔の特徴量を算出し、特定の人物の顔の特徴量との類似度をそれぞれ算出する類似度算出部182と、類似度と所定閾値とを比較する類似度比較部184と、画面内において、所定閾値以上の類似度を有する顔またはその周囲に、顔を特定する態様で指標を重畳する画像重畳部190と、モニター(液晶モニター108)と、指標を重畳した画像信号をモニター(液晶モニター108)に出力する画像出力部130と、を備えることを特徴とする。
(もっと読む)
画像合成装置及びプログラム
【課題】処理時間の浪費の防止を図るとともに、合成精度や画像品質の低下を抑制する。
【解決手段】撮像装置100であって、複数の画像のうち、何れか一の基準画像と対象画像を合成する画像合成処理と、画像の撮影状況に関連した撮影状況関連情報を特定する処理と、特定された撮影状況に基づいて、前記画像合成処理の内容を設定する処理とを行うCPU71を備える。
(もっと読む)
3次元座標計測装置
【課題】精度良くセンサ座標系を世界座標系に変換する。
【解決手段】基準プレート50を世界座標系でキャリブレーションされた3次元絶対座標計測器60で計測して、世界座標系における基準プレート50の基準点の3次元座標、法線ベクトル、及びエッジベクトルを演算する。また、3次元座標計測ロボット10の3次元センサ部8を指令値に応じた位置に移動させ、基準プレート50にスリット光を投射して撮像し、撮像した画像からセンサ座標系における基準プレート50の基準点の3次元座標、法線ベクトル、及びエッジベクトルを演算する。世界座標系及びセンサ座標系の各々における基準点の3次元座標、法線ベクトル、及びエッジベクトルを用いて、センサ座標系を世界座標系に変換する変換パラメータを、指令値毎に算出する。
(もっと読む)
物体検出装置
【課題】簡易な処理によって高精度に人物を検出することができる人物検出装置を提供する。
【解決手段】一般的に停止中の停止車両の付近には、その車両に乗降する乗員が存在することが想定される。また、今まさに停車しようと減速中の車両や低速度で走行中の車両からは停車後に乗員が降車してくることが想定される。これらの想定を利用して、カメラ11によって撮像された画像データ中において停止車両があるとき、その停止車両から所定距離内であって自車両の走行車線側に検出された対象物が人物である確率を示す人物確率を高めることで、処理負荷が高い複雑な形状のパターンマッチングなどを行わなくても高精度に人物を検知することができる。
(もっと読む)
画像送信装置、画像送信方法および画像送信プログラム
【課題】プライバシーを保護すること。
【解決手段】携帯電話機は、操作者を撮像した撮像画像を出力するカメラと、撮像画像の少なくとも一部の領域の指定を受け付けるタッチパネルと、受け付けられた領域に基づいて、撮像画像の少なくとも一部をマスクするためのマスク領域を決定し(S08)、撮像画像のマスク領域を別の画像に変換した合成画像を生成し(S10)、合成画像を送信する(S11)制御部と、を備える。
(もっと読む)
撮影装置
【課題】撮影時のレンズ及びズーム率に対応する歪曲収差係数を算出する事が可能な撮影装置を提供する。
【解決手段】撮影装置10は、撮影用のレンズを有し、当該レンズを用いた撮影が可能な撮影部20と、撮影部20がそれぞれ異なる撮影姿勢で撮影を行うことで得られる複数の画像情報から特徴点を抽出し、一の画像情報から抽出された特徴点と、他の画像情報から抽出された特徴点とから、被写体上の同一点を示す特徴点の組を探索し、特徴点の組に基づいて、他の画像情報が撮影されたときの撮影姿勢を推定し、推定された撮影姿勢に基づいて、レンズの歪曲収差係数を算出する歪曲収差係数算出部50と、を備える。
(もっと読む)
特徴検出装置、特徴検出方法、およびそのプログラム
【課題】 複数のカメラそれぞれで過去のフレーム結果と比較することで精度よく過去のフレームの結果を引継ぎ、特徴検出処理の処理負荷を低減する。
【解決手段】 ステレオ撮像した第1の映像と第2の映像からマーカを検出する探索ラインを設定し、探索ラインに沿って、第1の映像と第2の映像の両方の現在のフレームからマーカを検出し、フレームから検出したマーカの位置をマーカ情報として記録し、検出中に、検出中のフレームから検出したマーカの位置と、マーカ情報に基づく過去のフレームから検出したマーカの位置とが、予め設定された閾値以内であるか否かを判定し、閾値以内であると判定された数が、予め設定された個数以上であるか否かを判定し、個数以上であると判定された場合に、マーカの検出を中断し、過去のフレームのマーカ情報を現在のフレームのマーカ情報として記録する。
(もっと読む)
101 - 120 / 1,510
[ Back to top ]