
Fターム[5B057DC06]の内容
Fターム[5B057DC06]に分類される特許
1 - 20 / 501
三次元計測方法、三次元計測装置及び三次元計測プログラム
被写体姿勢推定装置および映像描画装置
画像処理装置、画像処理方法及びコンピュータプログラム
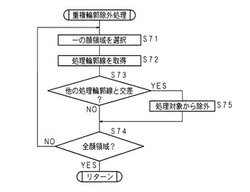
【課題】複数の人物が動きのあるポーズをとる場合でも、撮影した画像にて人物の顔を小顔に見せる加工処理を有効に行なうことができる画像処理装置、画像処理方法及びコンピュータプログラムを提供する。
【解決手段】画像から検出される顔を加工するに際し、検出された各顔について、処理輪郭線が、他の処理輪郭線と交差するか否かを判断し(S73)、処理輪郭線が他の処理輪郭線と交差する場合は(S73:YES)、加工処理の対象から除外する(S75)。これにより、加工により輪郭付近に歪みを生じさせない。
(もっと読む)
三次元ポートレートの作成装置

【課題】二次元顔写真に基づいて、人物の三次元ポートレートを正確に作成する。
【解決手段】顔写真入力部10により、特定の人物の二次元顔写真Fを画像データとして取り込み、顔写真格納部20に格納する。雛形モデル格納部30内には、複数N通りのバリエーションをもった頭部の三次元立体データを雛形モデルM1〜M5として格納しておき、その特徴量を特徴量格納部80に格納しておく。雛形選択部40Bは、特徴量抽出部70が抽出した顔写真Fの特徴量に最も近い特徴量をもつ雛形モデルMjを選択する。モデル修正部90は、特徴量の差を相殺するように、選択モデルMjを修正し、マッピング処理部50が、修正された選択モデルMj′に顔写真Fをマッピングして、三次元ポートレートGとして出力する。特徴量としては、目、鼻、口などの代表点の座標値を用いる。
(もっと読む)
シミ分類方法、シミ分類装置およびシミ分類プログラム
【課題】シミを高精度に分類することができるシミ分類方法を提供する。
【解決手段】被験者の皮膚を撮影して得られた画像の色空間を変換した色空間変換画像を生成し、色空間変換画像に含まれるシミを検出し、検出されたシミについて、形態特徴量および色特徴量を算出し、算出された形態特徴量および色特徴量に基づいて、機械学習法によりシミを分類する。
(もっと読む)
シミ検出方法、シミ検出装置およびシミ検出プログラム、並びに、シミ分類方法、シミ分類装置およびシミ分類プログラム
【課題】シミの検出を高速度に行うことができるシミ検出方法を提供する。
【解決手段】被験者の所定の皮膚領域を撮影して得られた撮影画像の色空間を変換すると共に変換された撮影画像の色空間のうち所定の色空間成分からなる色空間成分画像を生成し、色空間成分画像を多重解像度処理することにより、解像度の異なる複数の色空間成分解像度変換画像を生成し、生成された複数の色空間成分解像度変換画像をそれぞれ2値化処理することにより、所定の皮膚領域内に存在するシミを検出する。
(もっと読む)
三次元測定対象物の形態調査方法
【課題】レーザー走査装置により三次元測定対象物の形態を正しく測量し、調査する。
【解決手段】三次元測定対象物の形態調査方法であって、レーザー走査装置が調査範囲にレーザーを照射したとき、該レーザーの多数の反射点の各点を、三次元座標化された点として取得し、前記調査範囲の水平面上に多数のグリッドを派生させ、各グリッドの中にある点群の鉛直座標分布から標高値の最も低い低位点を抽出し、各グリッドで抽出された低位点を用いて調査範囲の地形モデルを作成する。
(もっと読む)
画像処理方法
【課題】予め基準となる画像データを保持する必要がなく且つ簡易に、光軸と穴の中心軸との位置ずれを補正して、パノラマ展開画像に変換することが可能な画像処理方法を提供する。
【解決手段】環状画像から内円及び外円を抽出する工程と、抽出した内円及び外円の中心をそれぞれ求める工程と、極座標変換する際に基準となる展開中心を、内円中心と外円中心との間で順次移動させながらパノラマ展開画像に変換する工程とを備える。これにより、全方位撮像装置10により穴Hの側壁面を撮像した環状画像をパノラマ展開画像に極座標変換する際に、全方位撮像装置10の光軸L1と穴Hの中心軸L2との位置ずれに起因する歪みを補正することができる。
(もっと読む)
位置検出装置、描画装置、および、位置検出方法
【課題】基板の面内領域から取得できる情報を用いて、基板の位置を迅速かつ確実に検出できる技術を提供する。
【解決手段】位置検出装置は、基板9を載置するステージ11と、ステージ11に載置された基板9の面内領域を撮像する撮像部と、撮像部が取得した撮像データに基づいて基板9の位置を特定する位置特定部と、を備える。位置特定部は、撮像データを解析して、基板の表面に形成されたスクライブラインのうち最外周に配置されている最外周スクライブライン910を検出し、最外周スクライブライン910の検出位置に基づいて、レイアウト領域93の中央に配置されている中央チップ領域920の位置を特定する。そして、中央チップ領域920の位置に基づいて、基板中心90の位置を特定する。
(もっと読む)
画像処理装置、画像処理方法およびプログラム
【課題】撮像画像の適切な位置にオブジェクトを合成することが可能な、新規かつ改良された画像処理装置、画像処理方法およびプログラムを提案する。
【解決手段】原点座標が設定されたオブジェクトを、前記原点座標が撮像画像に含まれる顔領域の位置に応じた合成基準座標に合うように前記撮像画像に合成する画像合成部、を備える、画像処理装置が提供される。
(もっと読む)
欠陥検査装置
【課題】SN比の高い欠陥検出を行うことができる欠陥検査装置を提供することである。
【解決手段】実施形態に係る欠陥検査装置は、被検査体上の画像を検出する検出部と、前記検出部からの出力に基づいて、欠陥部分の断面プロファイルを演算する特徴量演算部と、前記演算された断面プロファイルを再サンプリングして再構成する再サンプリング部と、前記再構成された断面プロファイルと、テンプレート画像とのパターンマッチングを行う積和演算部と、前記パターンマッチングの結果を閾値を用いて判定する判定部と、を備えている。そして、前記再サンプリング部は、前記演算された断面プロファイルにおける重心を求め、求められた重心を中心画素として前記断面プロファイルを再サンプリングして再構成する。
(もっと読む)
三次元位置・姿勢認識装置、産業用ロボット、三次元位置・姿勢認識方法、プログラム、記録媒体
【課題】ステレオマッチング処理において互いに異なる部品91a〜91c間で対応付けが行われるといった誤対応の発生を抑制する。
【解決手段】認識対象部品91aを含む複数の部品91a〜91cを異なる視点から撮像した複数の撮像画像I1、I2それぞれから、認識対象部品91aが写る対象領域R1、R2が抽出される。複数の撮像画像I1、I2それぞれの対象領域R1、R2に対して、ステレオマッチング処理が実行される。つまり、ステレオマッチング処理を行う領域R1、R2を、撮像画像I1、I2のうちの認識対象部品91aを含む対象領域R1に限定する。そのため、対象領域R1から認識対象部品91a以外の部品91b、91cを外してステレオマッチング処理を実行することができ、その結果、ステレオマッチング処理において互いに異なる物体間で対応付けが行われるといった誤対応の発生を抑制できる。
(もっと読む)
個体識別装置、個体識別方法、及びプログラム
【課題】所定の特性を有する微小細粒(タガント)を物品に付与し、更にその分布位置に基づいて高精度に個々の物品を識別することが可能な個体識別装置等を提供する。
【解決手段】個々の物品1の基材10上に、基材とは異なる光学反射特性を有し、かつ、異色の微細物質12、並びに特徴的な図案及び形状等を有する微細物質をランダムに配置しておく。また個々の物品をスキャナ等により光学的に読み取り、所定の画像処理を施して微細物質の特徴点及びその特徴点における色情報に関する特徴量を抽出し、基準特徴量データとして記憶部に記憶しておく。識別対象となる物品を上述の読み取りの際と同様の手法で読み取り、同様の画像処理を施して微細物質の対象物特徴量データを抽出する。そして、抽出した対象物特徴量データと記憶されている基準特徴量データとを比較することにより識別対象とする物品と基準物品とが同一個体であるか否かを判定する。
(もっと読む)
画像処理装置、画像処理方法、画像形成装置、プログラムおよび記録媒体
【課題】色剤使用量を削減しつつ高画質化な画像を形成し、画質と色剤使用量の低減を両立させる。
【解決手段】オブジェクト分離部103は、画像オブジェクトを主要部分(被写体)と非主要部分(背景部分)に分離し、色剤使用量低減処理部106a、106bは、非主要部分の色剤低減量を主要部分より多くし、画像オブジェクトの主要部分からエッジに向けて段階的に色剤低減量を多くする。
(もっと読む)
道路状況把握装置
【課題】非監視対象車線を走行する車両の誤判定を防止し、監視対象車線に対する道路状況を正確に判定することが可能となる道路状況把握装置を提供することである。
【解決手段】実施形態に係る道路状況把握装置は、車両が走行する複数の車線からなる道路上の画像を撮像手段により撮像し、この撮像された画像に基づき前記道路の状況を判定する道路状況把握装置において、前記撮像された画像から移動ベクトル画像を作成し、この作成された移動ベクトル画像の方向性とあらかじめ与えられる車両の進行方向情報とから非監視対象車線を走行する車両を検出し、この検出された非監視対象車線を走行する車両の画像を前記撮像された画像から除外することを特徴としている。
(もっと読む)
対象物体の検出方法、検出装置及びプログラム
【課題】対象物体を3次元の点群として計測した場合の形状データに基づいて、高速化を図りつつ精度よく対象物体を検出することの可能な検出方法を提供する。
【解決手段】3次元計測手段から3次元の計測点群として球体の形状データを取得する形状データ取得ステップ(S1)と、仮想座標空間において球体が占める対象体領域を各計測点の付加情報に従って区画する領域分割ステップ(S41)と、分割された各対象体領域の中から球体と推定される推定領域を抽出する対象体領域抽出ステップ(S43)と、推定領域毎に推定球体を生成し、対象体と認識される推定対象体を認識対象体とする対象体認識ステップ(S44)とを備える。
(もっと読む)
振動計測装置および振動計測方法
【課題】振動の測定および解析を容易に行うことができるようにする。
【解決手段】高速度カメラ4の撮像部4aは、ケーブル10の各実測点に設けられたマーカーシール5が正反射する光を撮像する。高速度カメラ4の計算処理部4bは、撮像部4aによる撮像と並行して、撮像部4aが撮像した画像毎に各実測点の座標を求める。高速度カメラ4のメモリ4cは、各実測点の座標に係るデータを記憶する。コンピュータ6は、メモリ4cに記憶された各実測点の座標に係るデータを用いてケーブル10の振動分析を行う。
(もっと読む)
顔画像特徴量生成装置および顔画像特徴量生成プログラム
【課題】光の影響にロバストであって且つ高精度に顔画像特徴量を生成する。
【解決手段】画像データを取り込む画像データ取得部10と、画像データ取得部10が取り込んだ画像データに対して顔検出処理を実行し、その画像データから顔領域を抽出する顔領域抽出部20と、顔領域抽出部20が抽出した顔領域から、円形または楕円形の解析領域を二分する第1の領域および第2の領域を決定する解析領域決定部30と、解析領域決定部30が決定した第1の領域および第2の領域それぞれについて特徴量を計算し、これら計算した特徴量を連結して顔画像特徴量を生成する顔画像特徴量計算部40とを備えた。
(もっと読む)
撮像装置、その制御方法、および制御プログラム
【課題】人物などの被写体の顔領域の検出が困難な状況においても逆光シーンであるか否かを判別する。
【解決手段】ブロック分割部102は画像データが示す画像を複数のブロック領域に分割する。ブロック特徴量決定部103は複数のブロック領域の各々について画像データに基づいてその特徴量を決定する。グルーピング部104は特徴量に応じて複数ブロックの各々をグループ化する。被写体・背景評価値決定部105は画像データに応じてグループ毎に当該グループの被写体らしさを表す被写体評価値と当該グループの背景らしさを表す背景評価値を求める。シーン判別部106は被写体評価値および背景評価値に応じて画像データを得た撮影シーンが逆光シーンであるか否かを判別する。
(もっと読む)
画像処理装置、画像処理方法およびプログラム
【課題】レンズを用いて撮影することによって得られるぼかし画像を、画像データを処理することによって得ることのできる画像処理装置、画像処理方法およびプログラムを提供する。
【解決手段】入力された画像データが表す画像のうち局所光に対応する領域を検出するとともに、検出された局所光に対応する領域の位置に応じて、ぼかし処理を施す範囲を異ならせる。
(もっと読む)
1 - 20 / 501
[ Back to top ]